Download as PDF, PPTX


![Tree traversals
A traversal is a systematic way to visit all nodes of T.
pre-order: root, children
• parent comes before children; overall root first
post-order: children, root
• parent comes after children; overall root last
void preorder(T, v)
visit v
for each child w of v in T do
preorder(w)
void postorder(T, v)
for each child w of v in T do
postorder(w)
visit v
Analysis: O(n) [same arguments as before]
15](https://image.slidesharecdn.com/210-trees-160831162857/75/210-trees-15-2048.jpg)



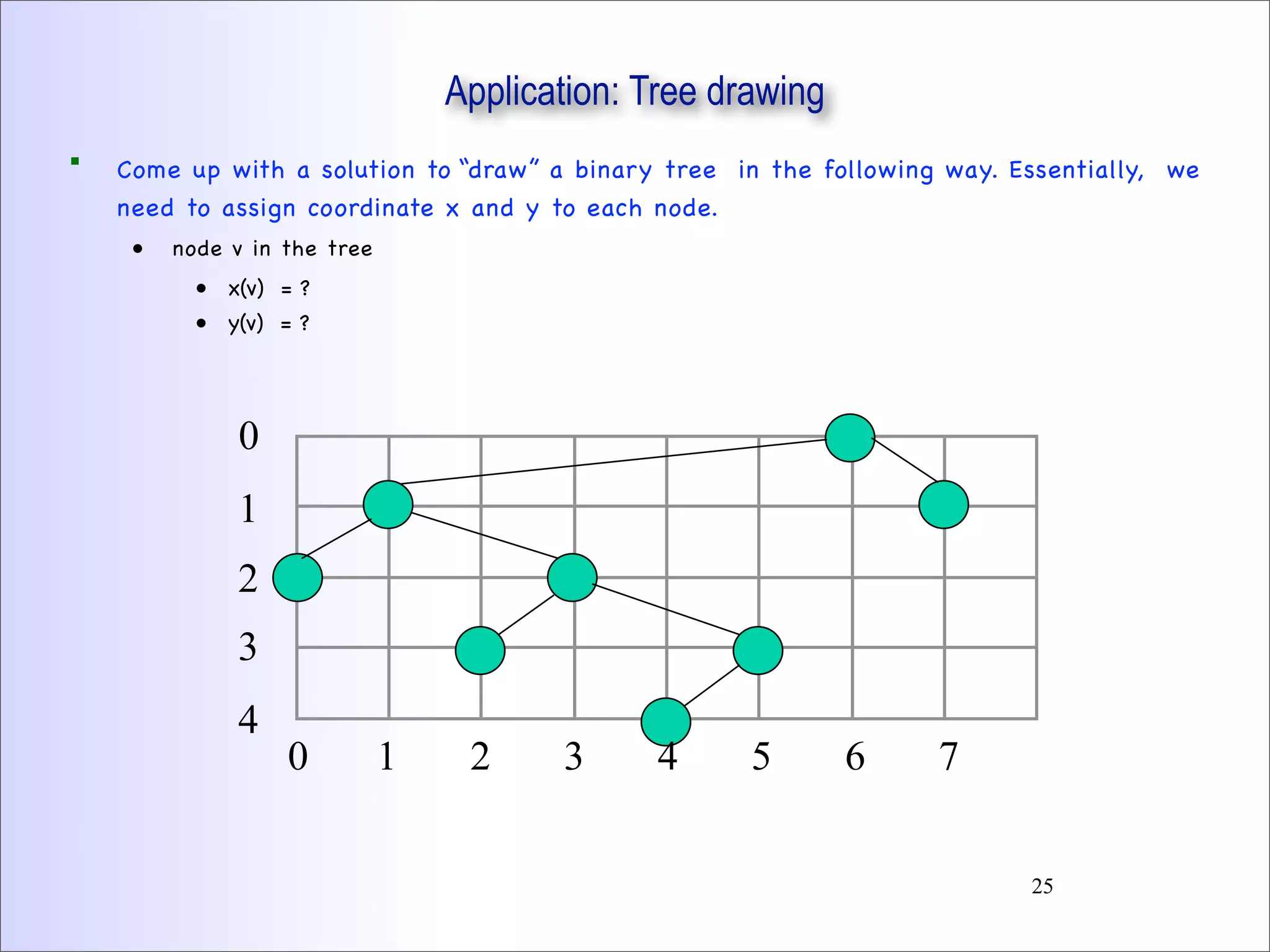
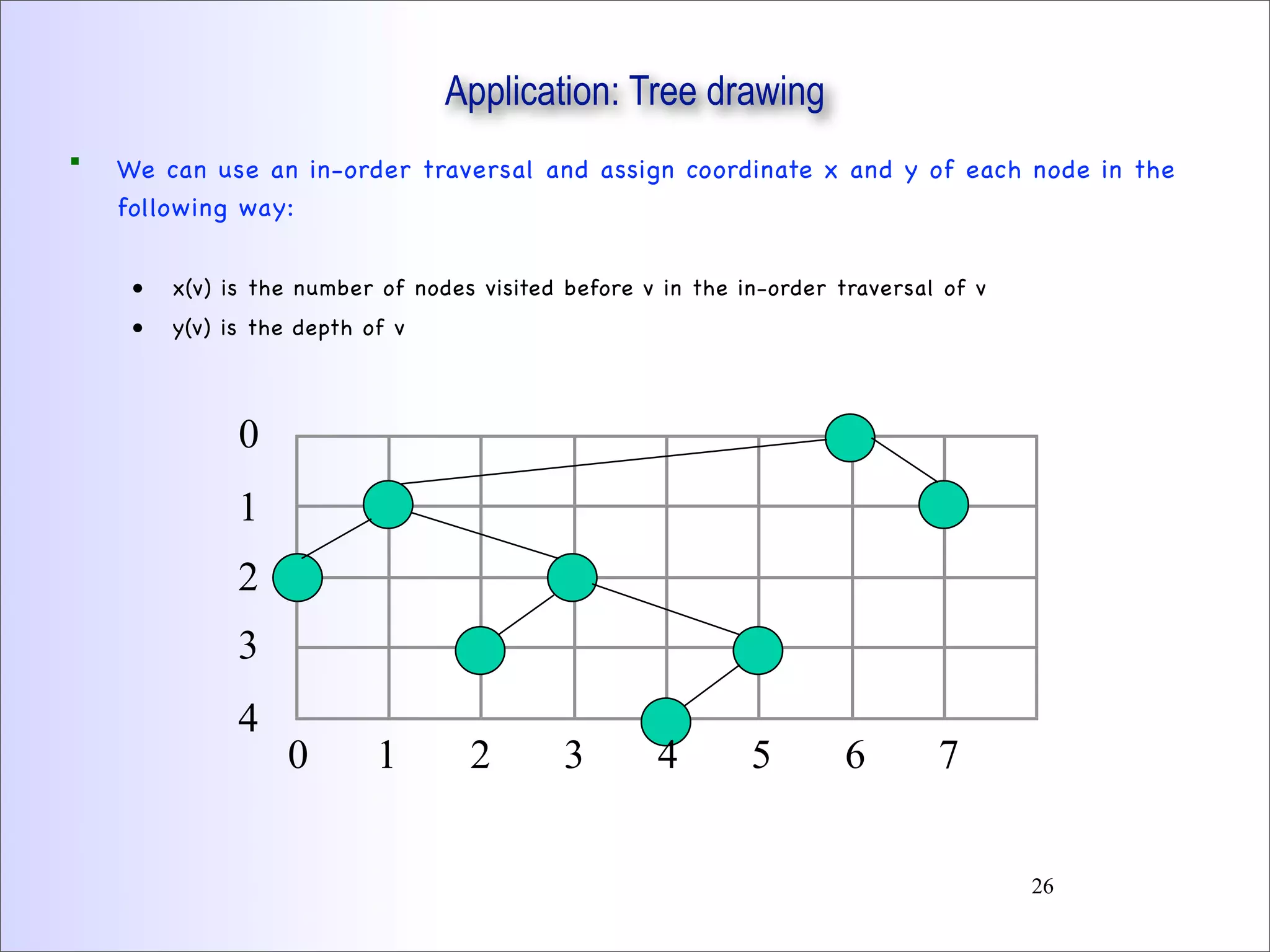
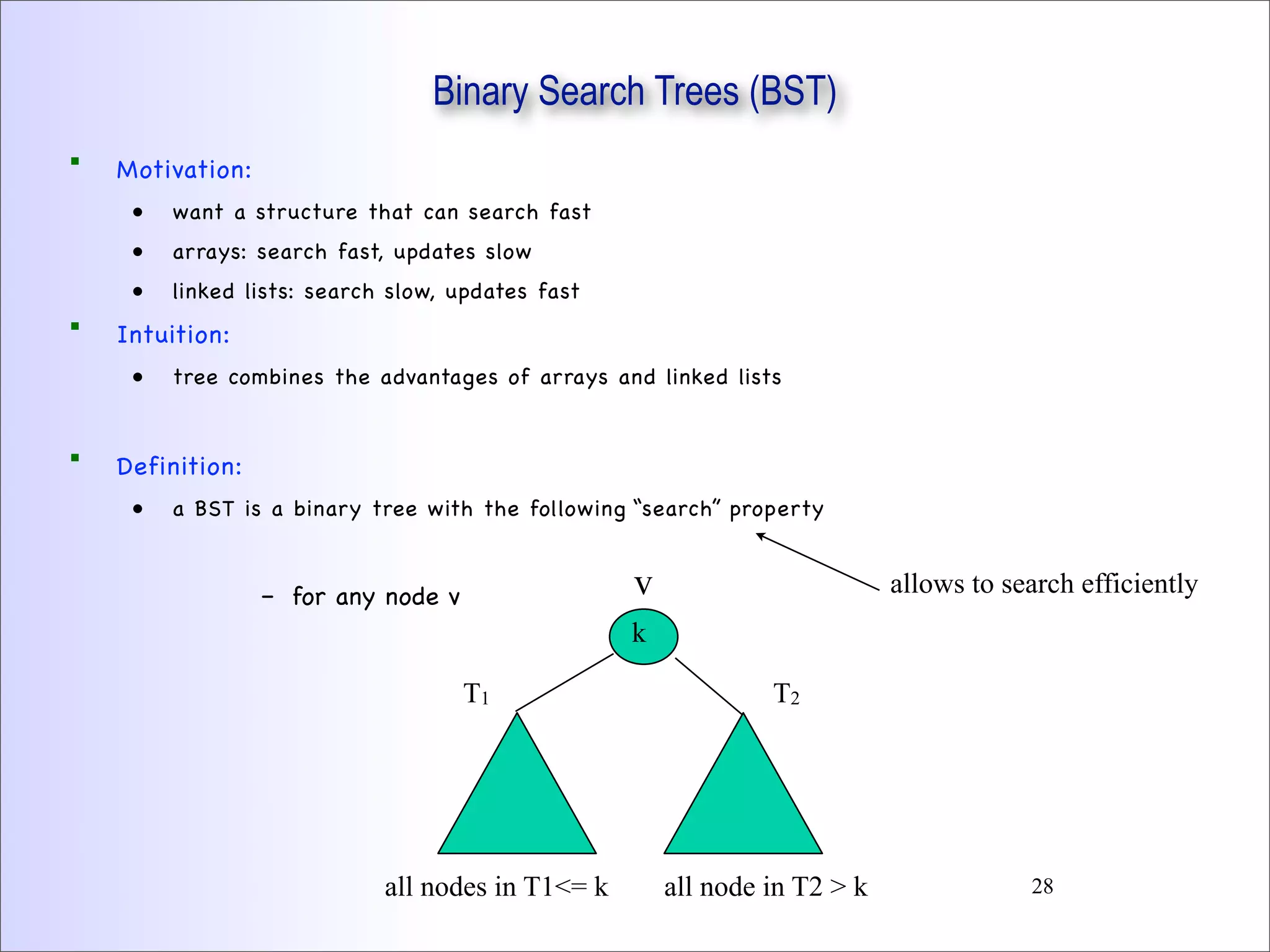
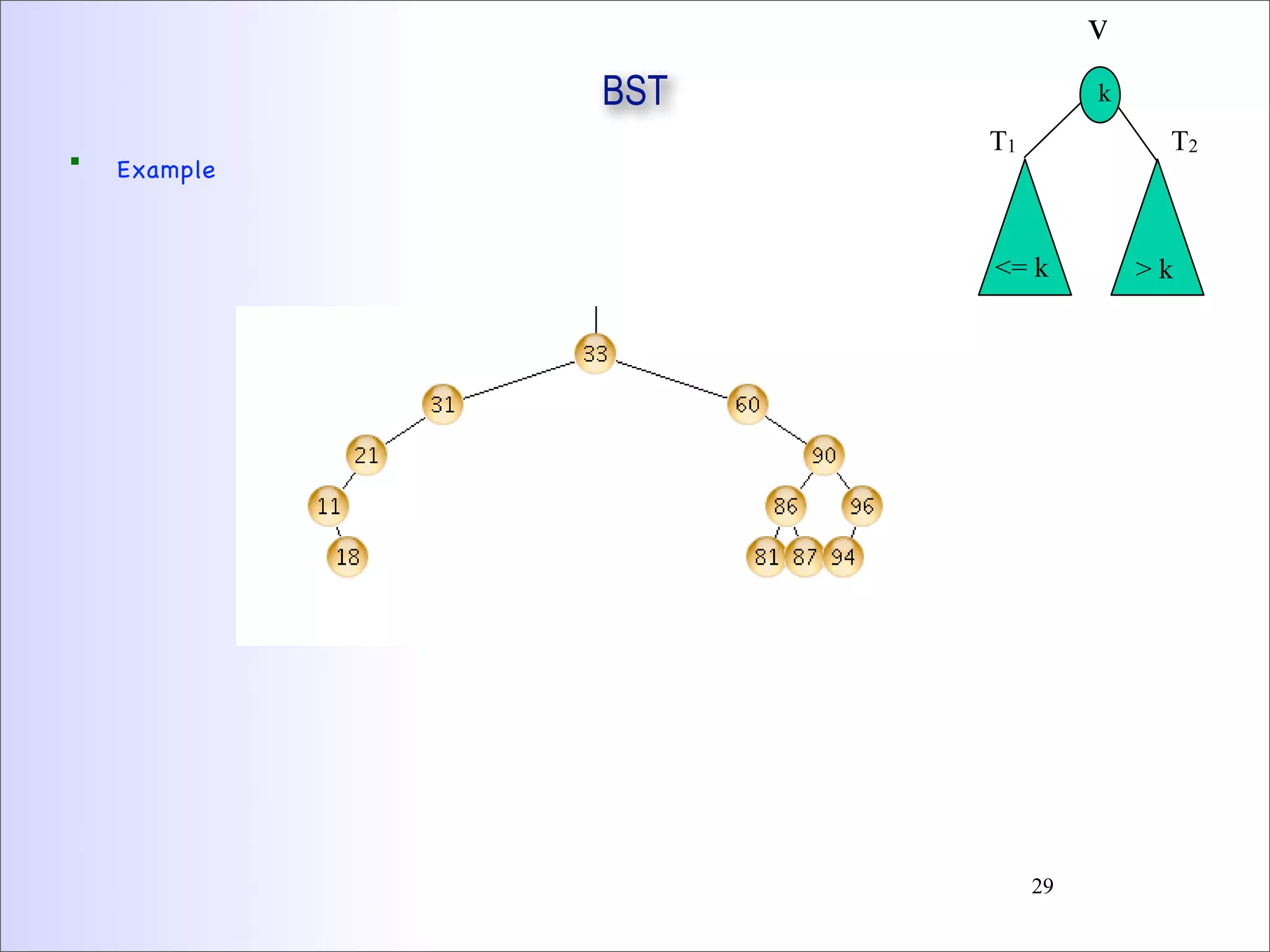


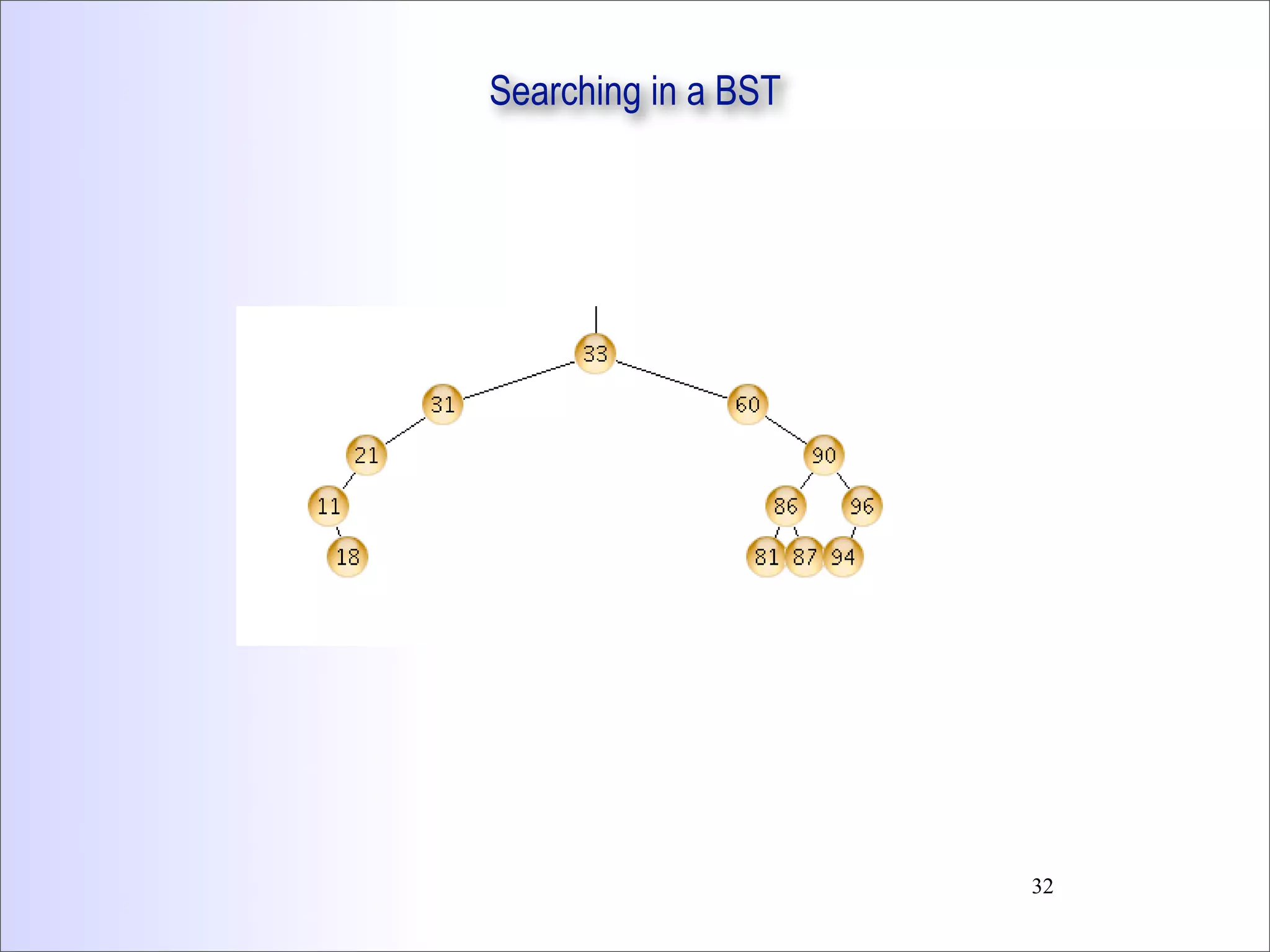
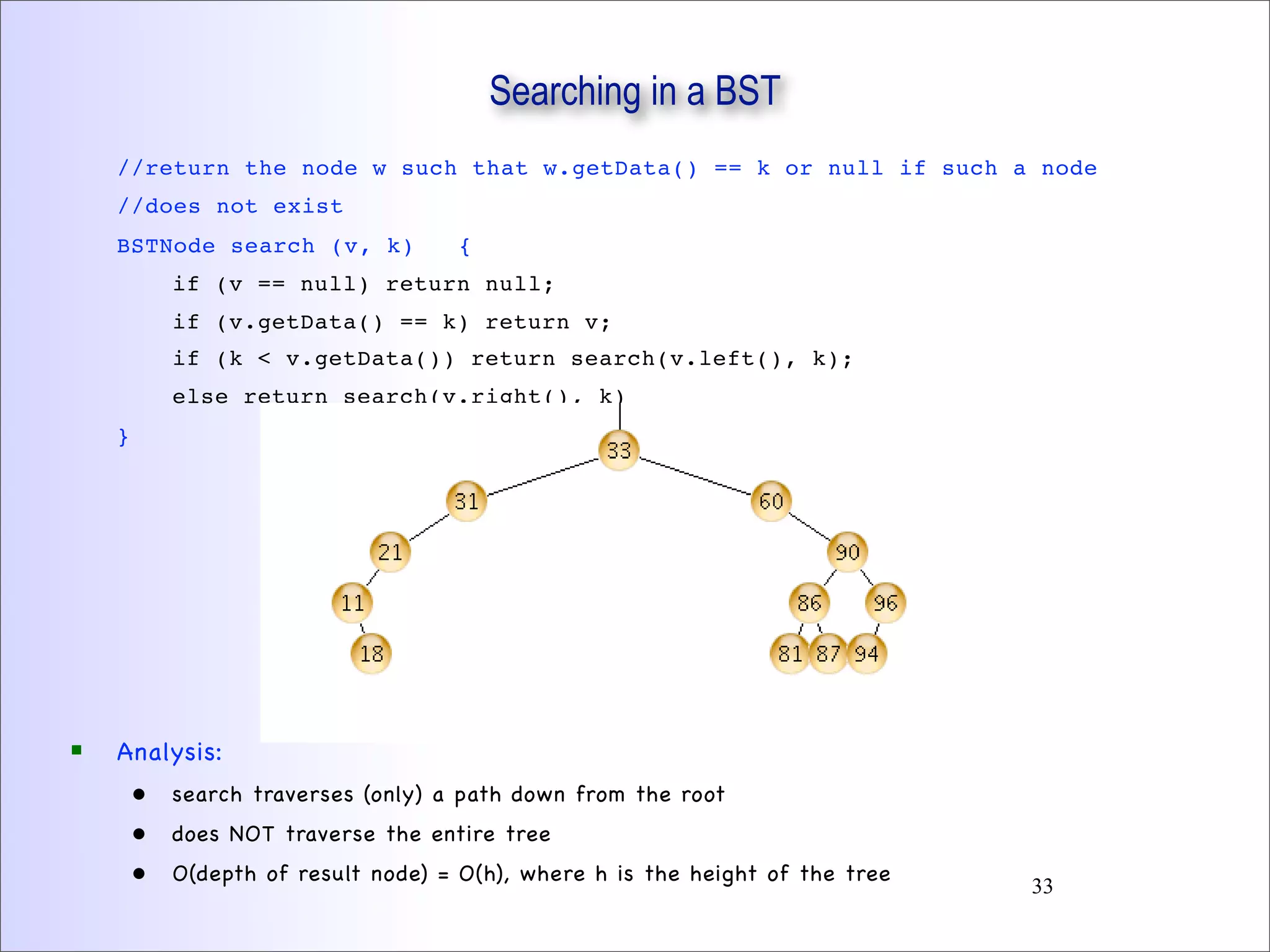
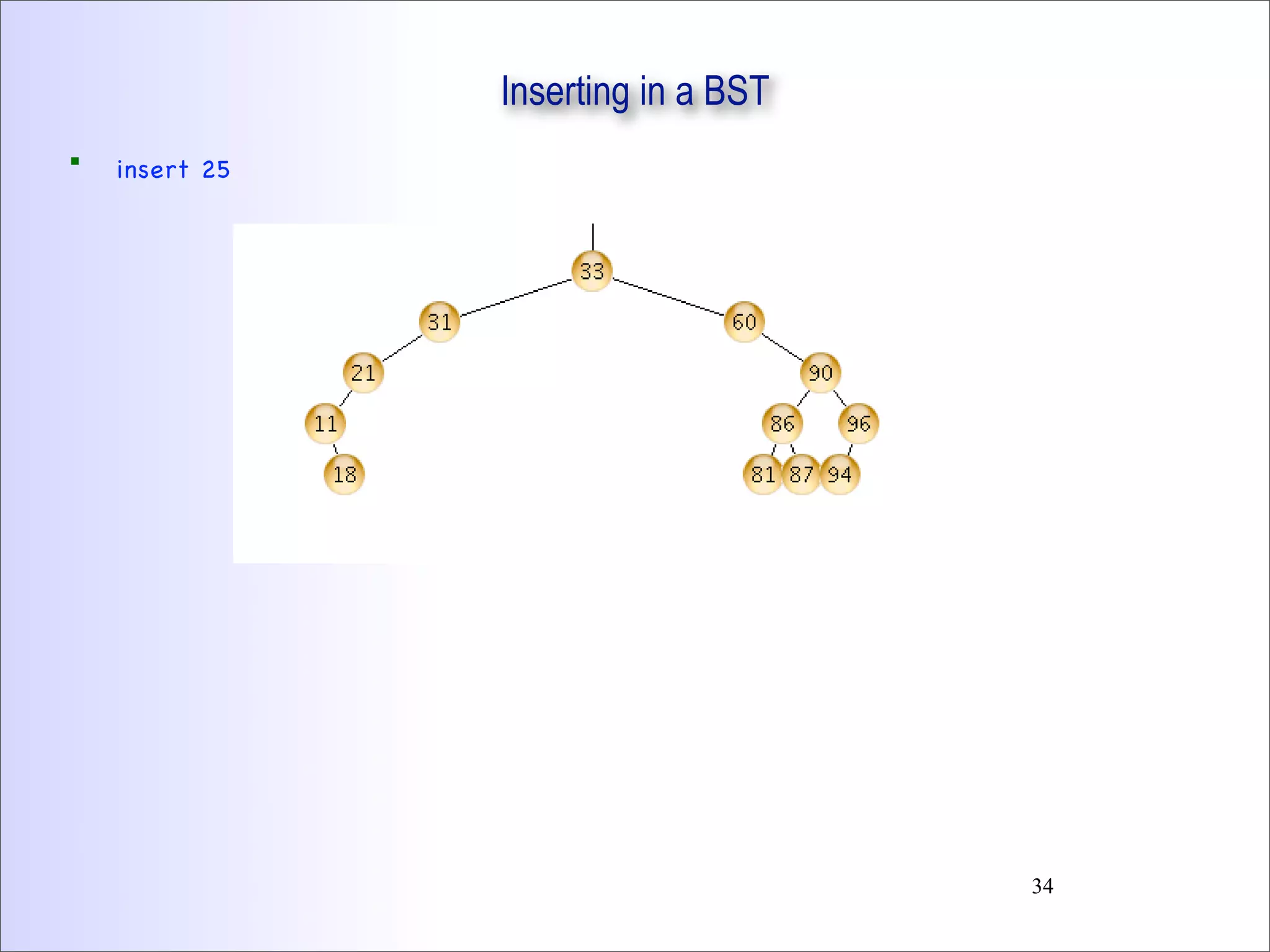
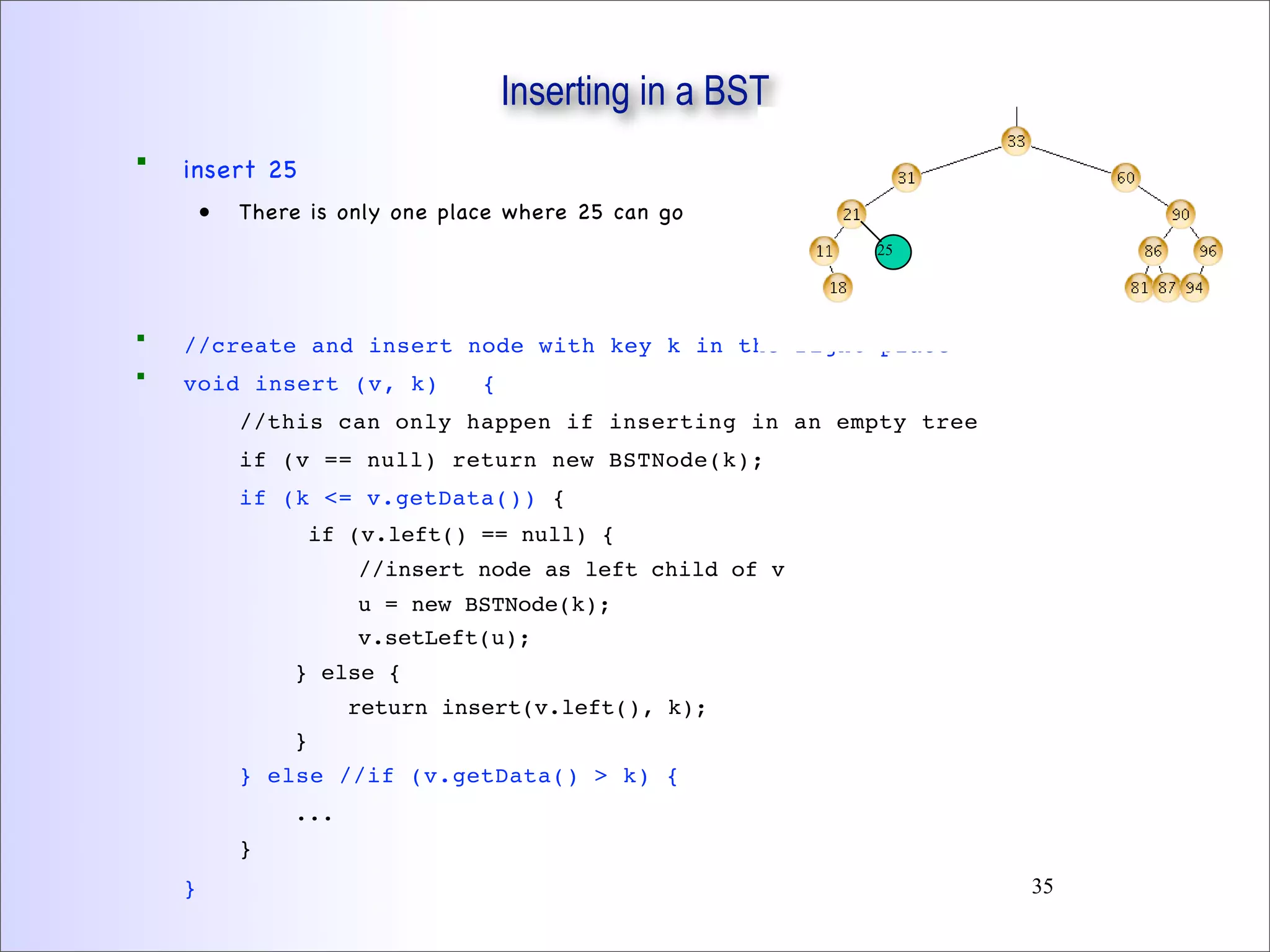
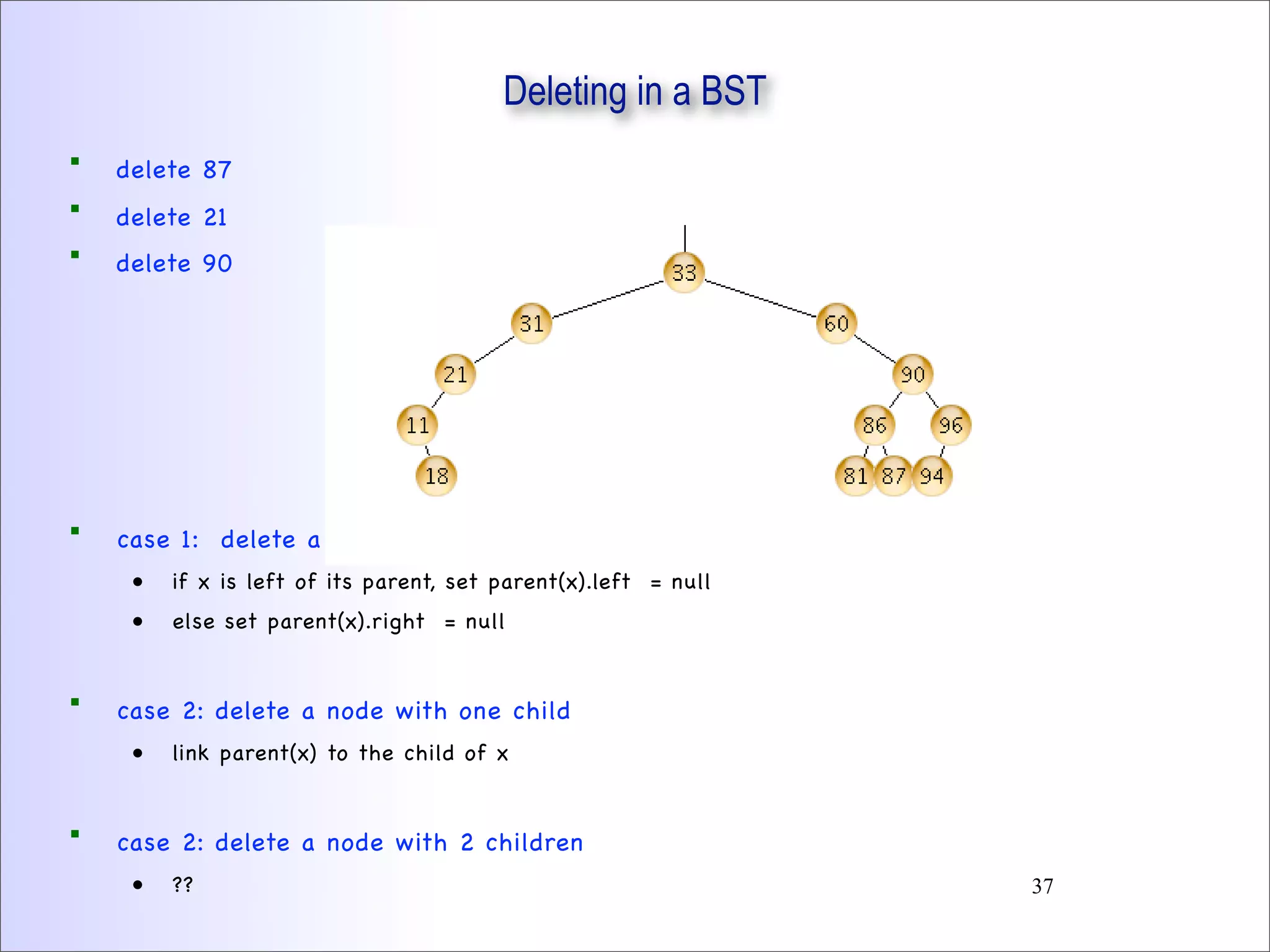
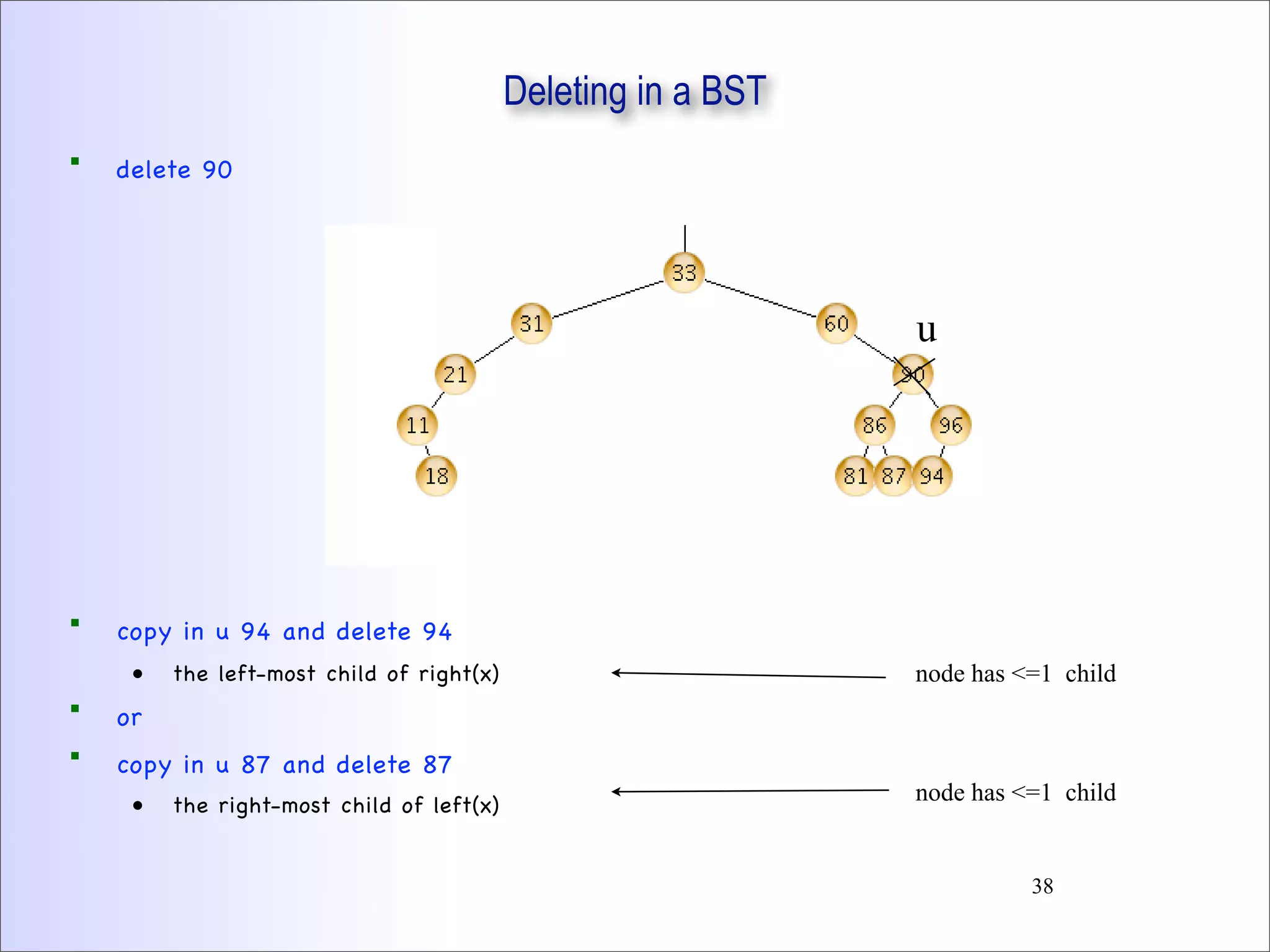
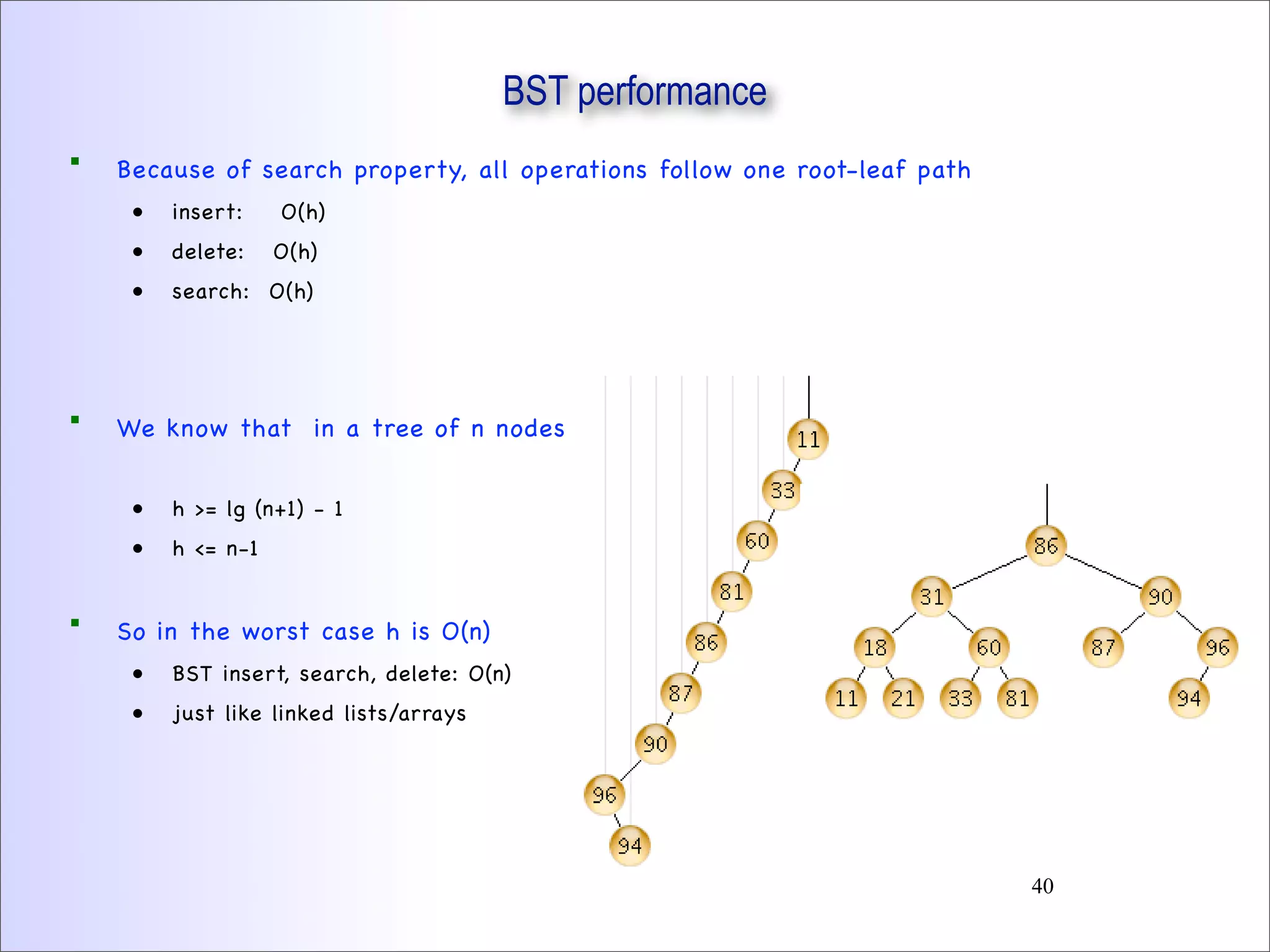

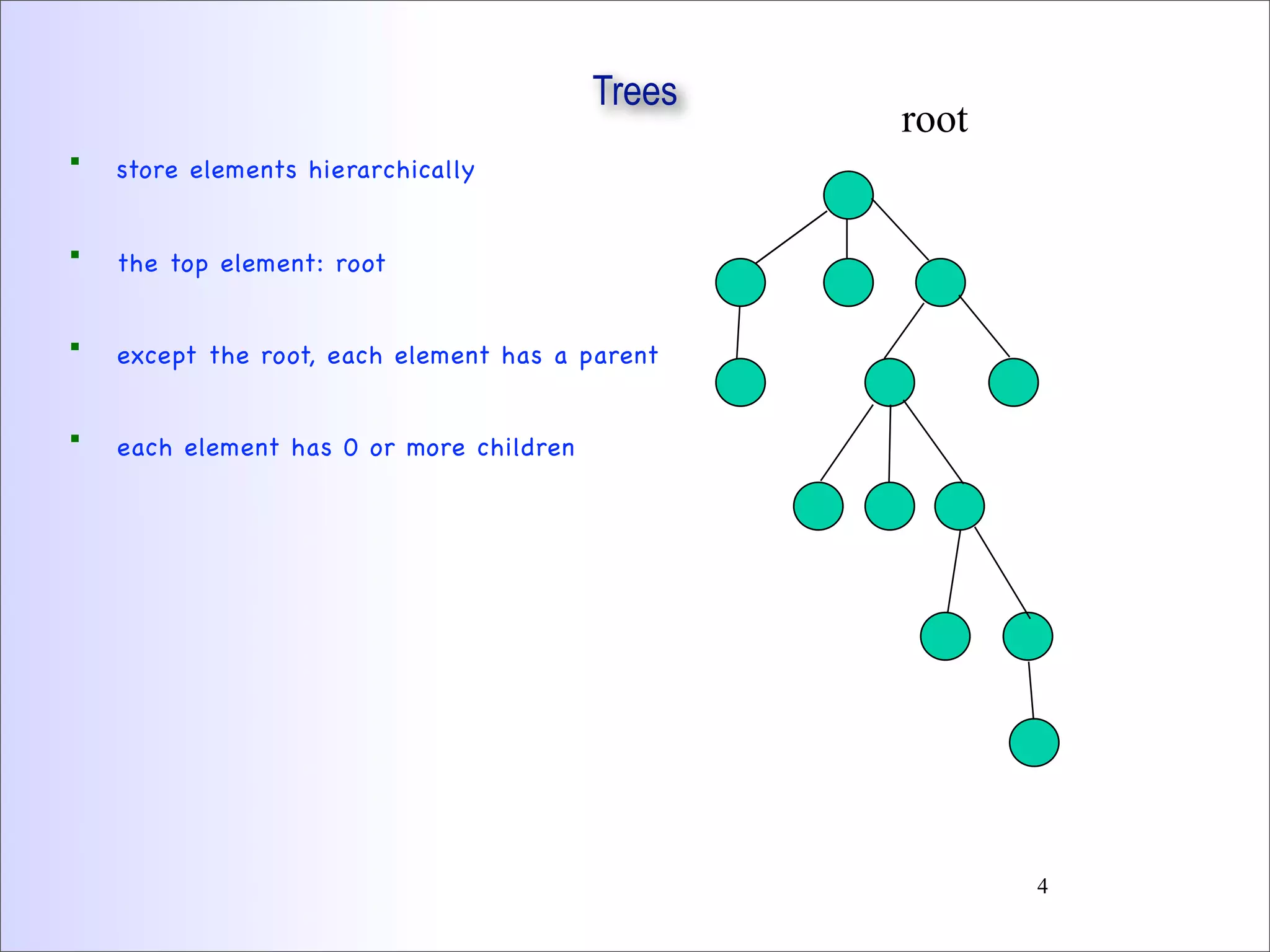
This document discusses trees and binary trees. It covers tree definitions, properties, traversals, and common algorithms. Specifically for binary trees, it discusses their implementation, operations like insertion and deletion, and binary search trees. BSTs allow for efficient search, insertion, and deletion in O(h) time where h is the tree height. Balanced BSTs like red-black trees maintain h as O(log n) to guarantee efficient performance.