Downloaded 103 times

![Depth First Traversal
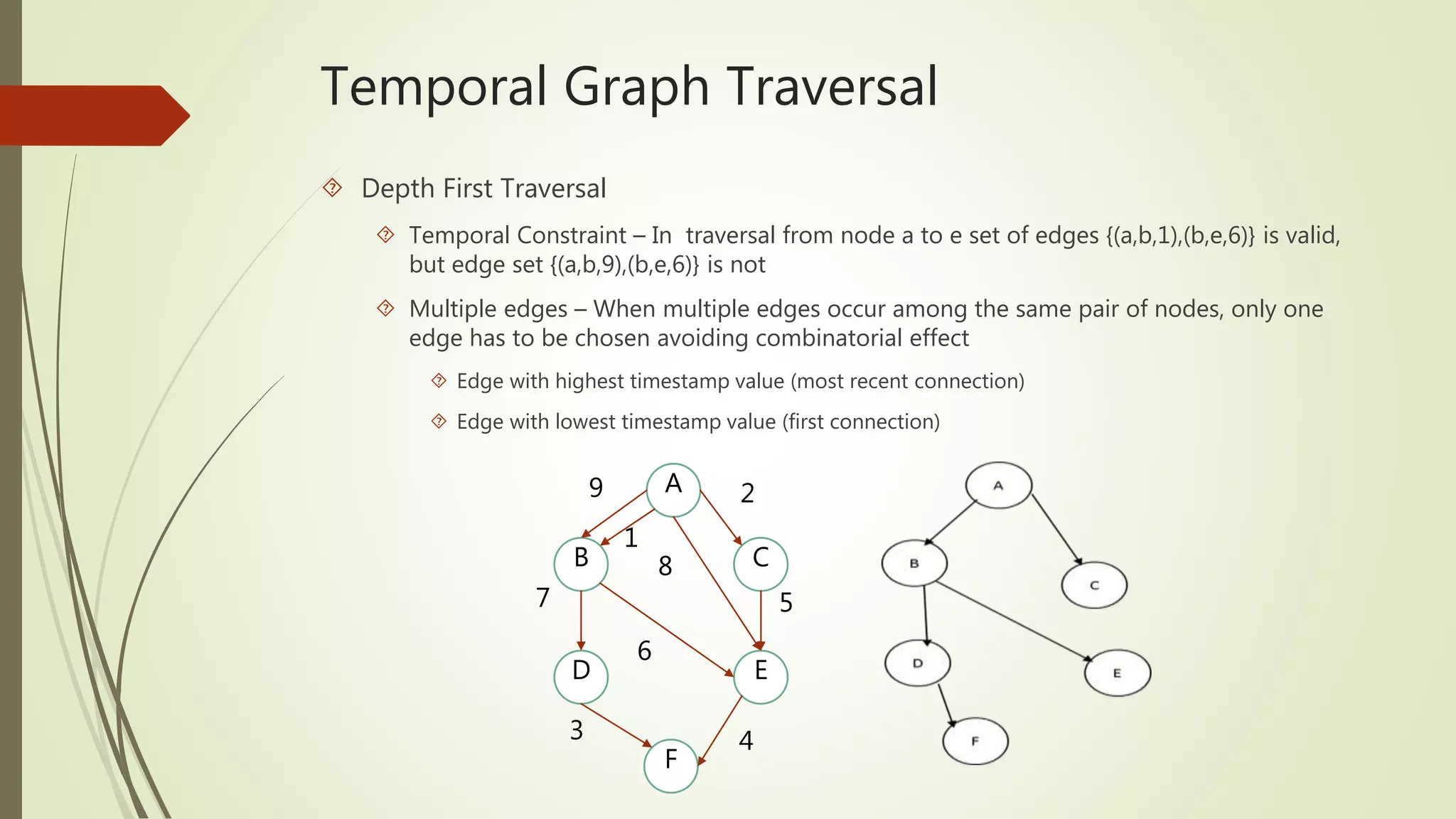
Create a DFS tree rooted at node ‘a’ with lowest timestamp value
Initially every node’s visiting time is infinite
At node ‘a’, Eset = {(a,b,9), (a,b,1), (a,e,8), (a,c,2)}
Take edge (a,b,1) and visit node ‘b’ and mark time 1
Now Eset = {(b,d,7), (b,e,6)} and take edge (b,e,6), mark time t[e] = 6, and then (b,d,7), mark
time t[d] = 7, and so on
a
b c
e
d
2
7
1
5
a
c
e
b
d
3 f
2
8
6
7
1
4
9
5
6](https://image.slidesharecdn.com/temporalgraph-141029010646-conversion-gate02/75/Temporal-graph-8-2048.jpg)
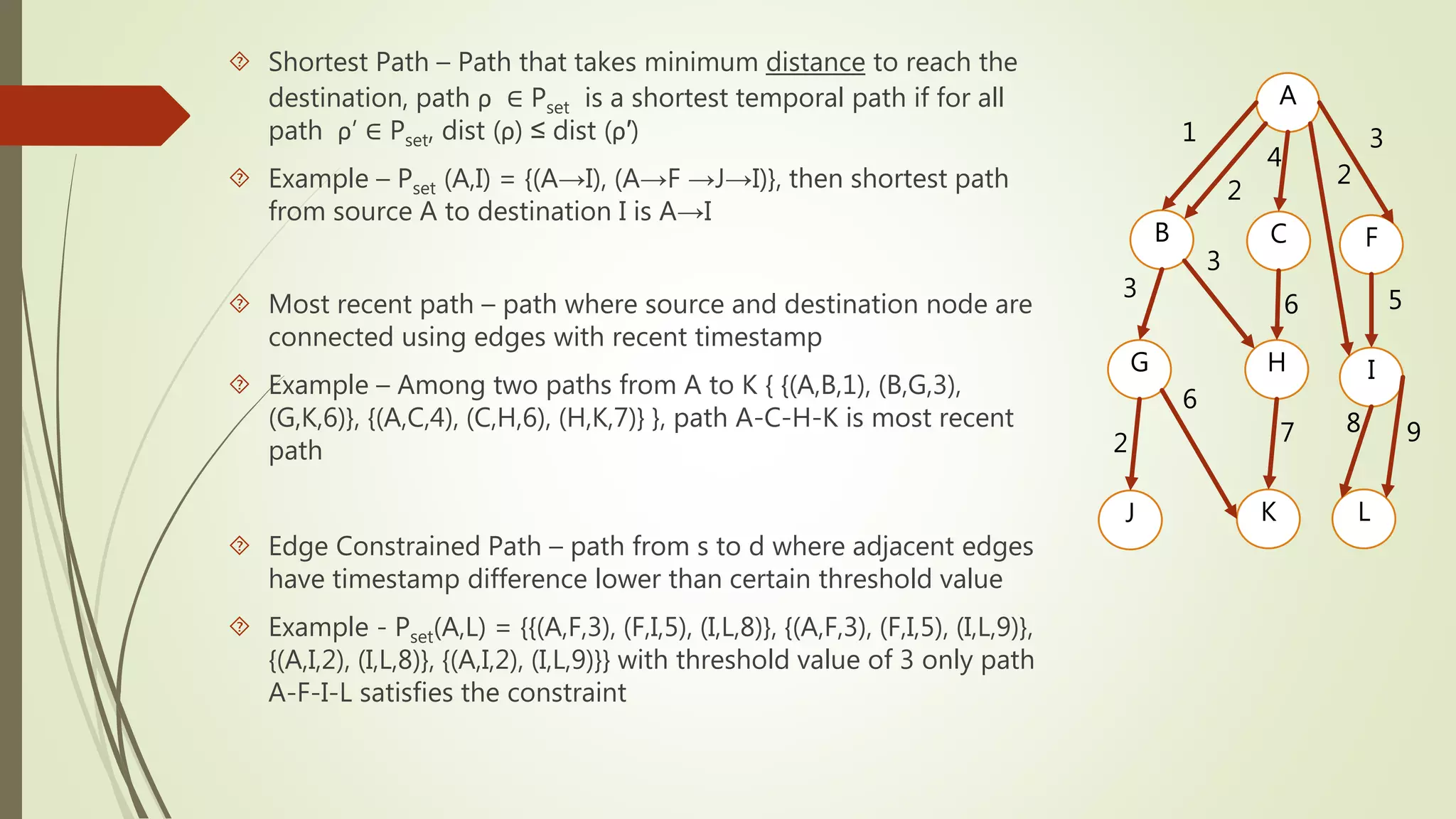
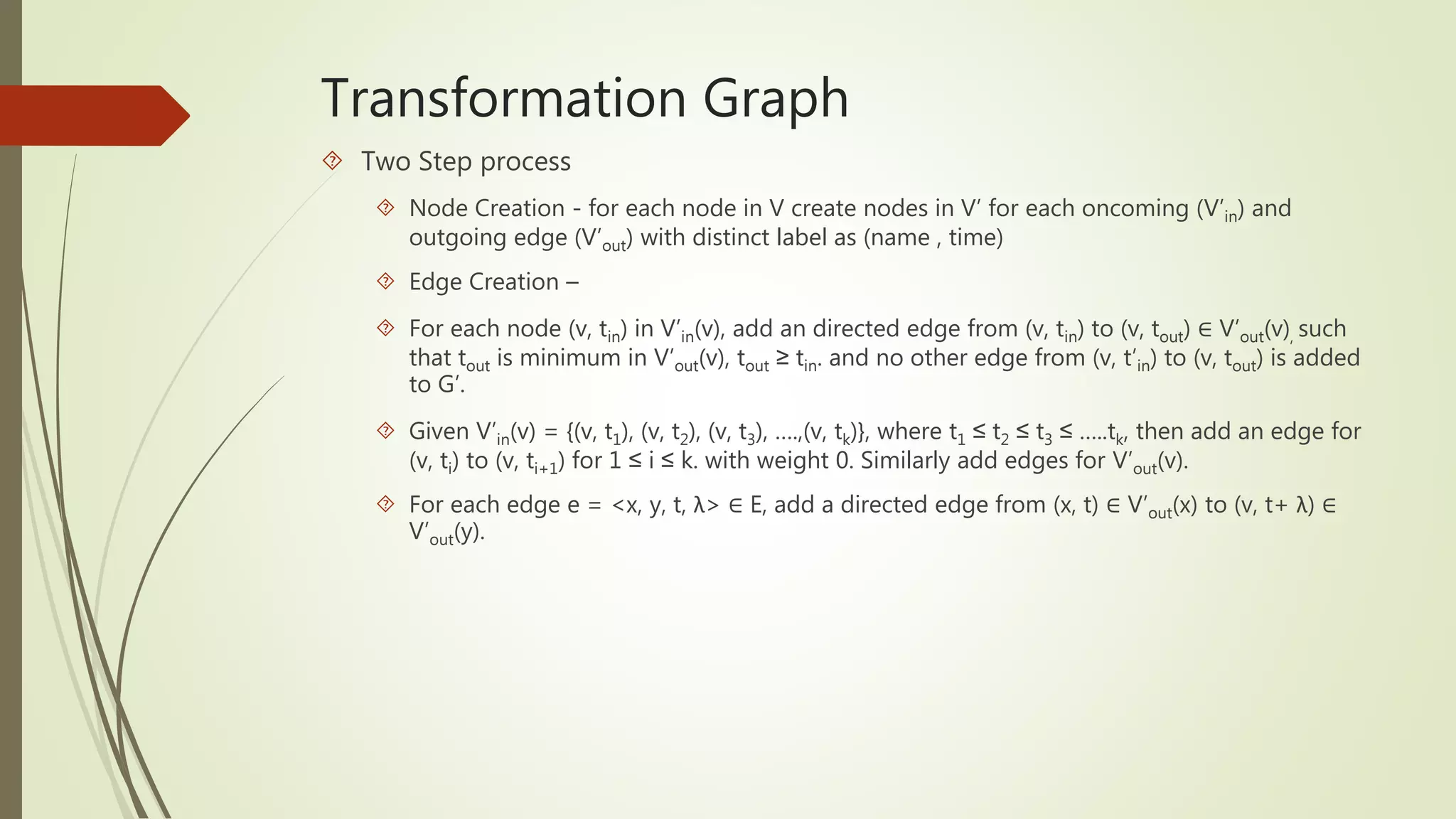
![Paths in Temporal Graph
A path ρ = {(s, u1, t1), (u1, u2, t2), (u2, u3, t3),……..,(ui-1, ui, ti), ….. (un-1 ,d, tn)} from
source s to destination d is a temporal path if ti ≤ ti+1
Terminology
Pset - set of all paths from source s to destination d
[ta, tb] – time interval
t[u] – time at which node u can be reached from source s
tstart(ρ) - timestamp of a path ρ at which it starts at source s
tend(ρ) - timestamp of a path ρ at which it ends at destination d
dist(ρ) - number of nodes in path ρ
duration(ρ) – time taken by path ρ to reach destination node from source node, tend(ρ) -
tstart(ρ)
Transition time – time taken to reach from node to its neighbour node (λ), by default
assumed to be 1](https://image.slidesharecdn.com/temporalgraph-141029010646-conversion-gate02/75/Temporal-graph-11-2048.jpg)
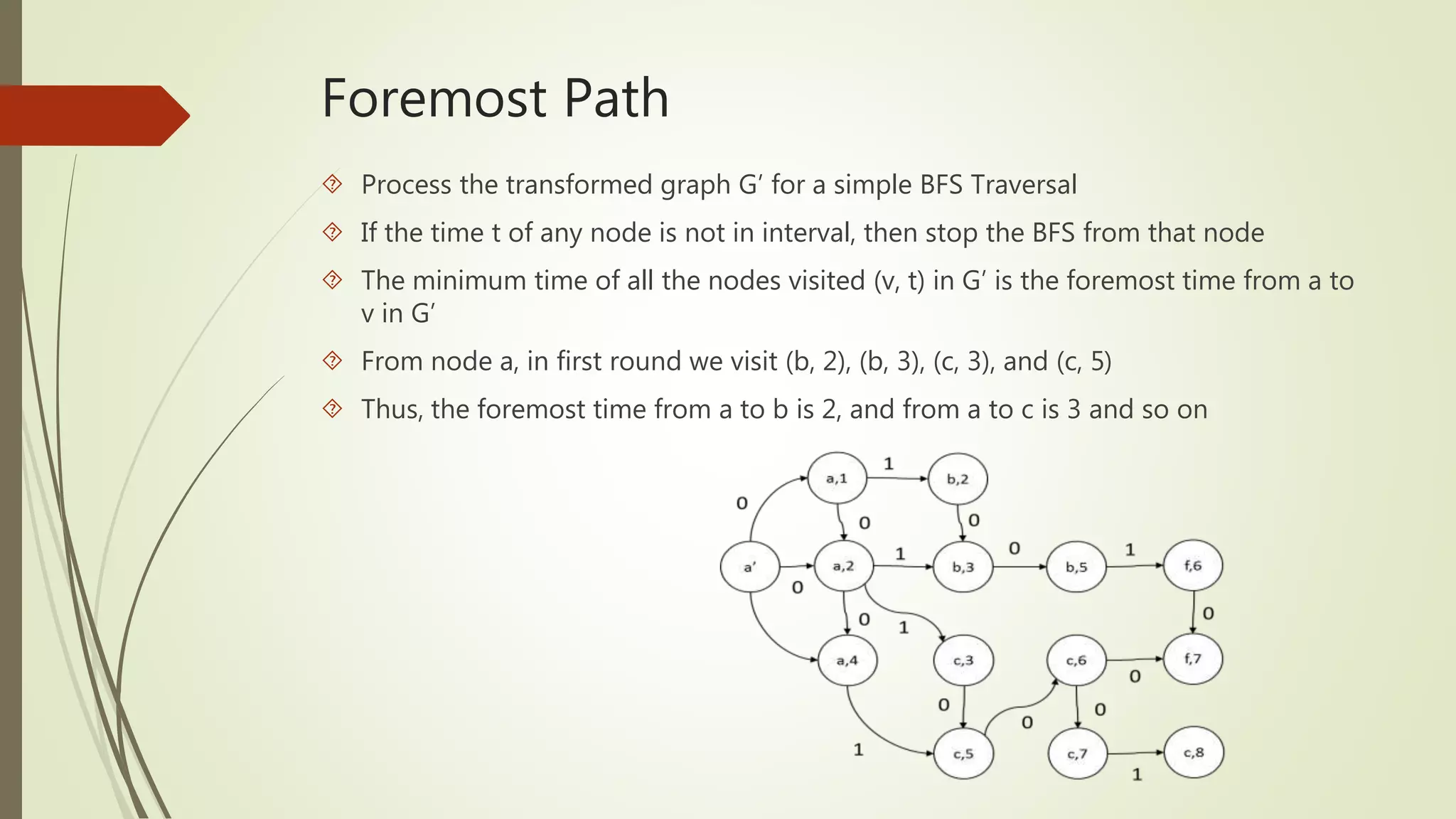
![Foremost Path
Foremost Path for node ‘s’ in time interval [ta,tb]
For each node u in graph G t[u] = ∞
Considering each edge in the sequence in the order
Check for two conditions if true then update t[v] = t+λ
t+λ ≤ tb and t ≥ t[u]
t+λ < t[v]
if t+ λ > tb then exit](https://image.slidesharecdn.com/temporalgraph-141029010646-conversion-gate02/75/Temporal-graph-17-2048.jpg)
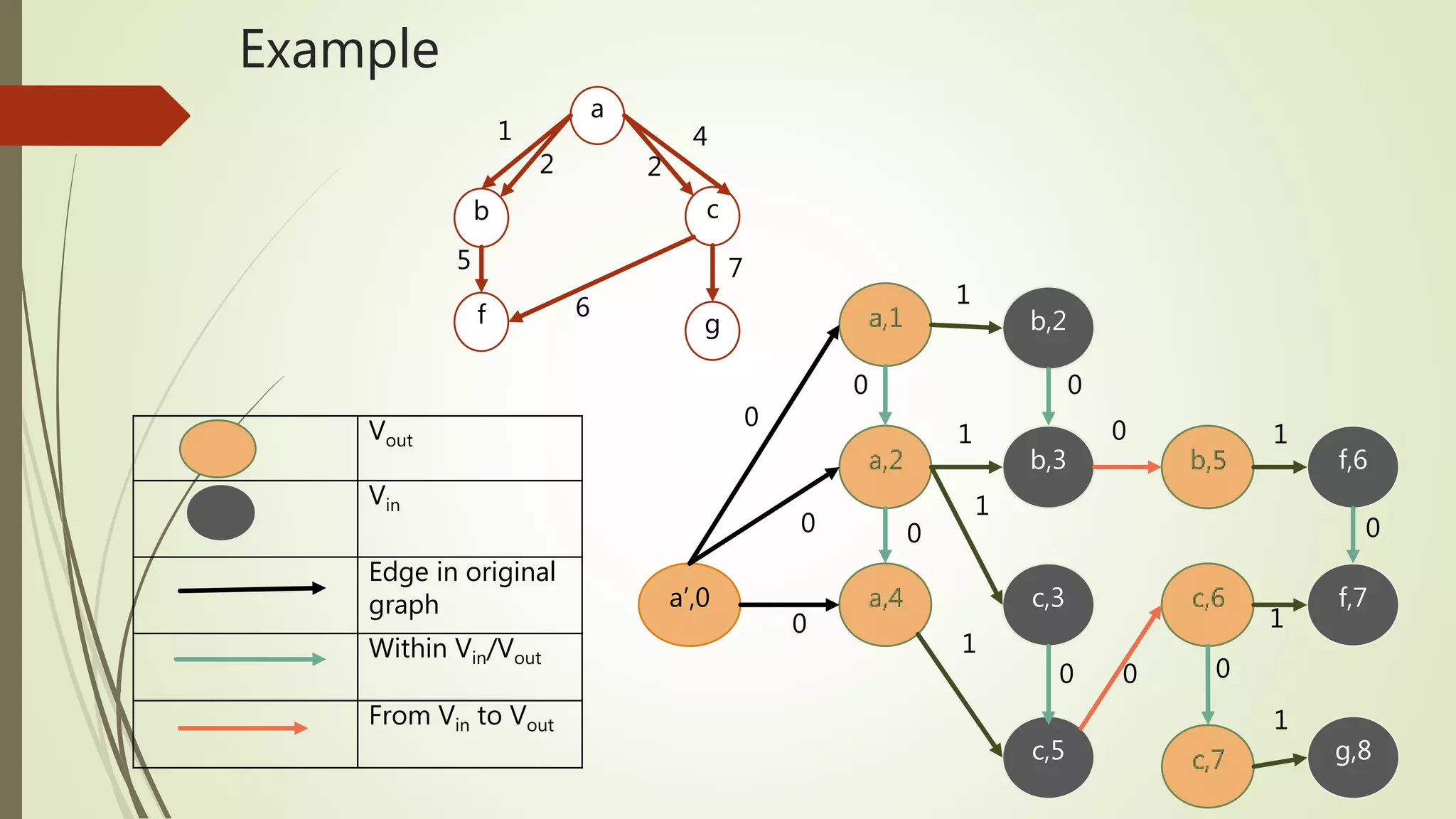
![Example
Edge representation is {(a, b, 1, λ), (a, c, 2, λ), (d, f, 3, λ), (b, d, 7, λ)}
Foremost path for node ‘a’ in [1,4] assuming λ = 1
For all node t[u] =∞
Mark t[a] = 0
For edge (a, b, 1, 1), t + λ = 2, satisfies conditions, update t[b] = 2
For edge (a, c, 2, 1), t + λ = 3, satisfies conditions, update t[c] = 3
For edge (d, f, 3, 1), t + λ = 4, doesn’t satisfies condition t ≥ t[d] as t[d] = ∞ and t =
3
t+λ ≤ tb and t ≥ t[u]
t+λ < t[v]
a
c
b
d f
3
2
7
1
∞
∞
∞
∞ ∞
0 a
3
c
b
d f
3
2
7
1
2 ∞ ∞](https://image.slidesharecdn.com/temporalgraph-141029010646-conversion-gate02/75/Temporal-graph-18-2048.jpg)
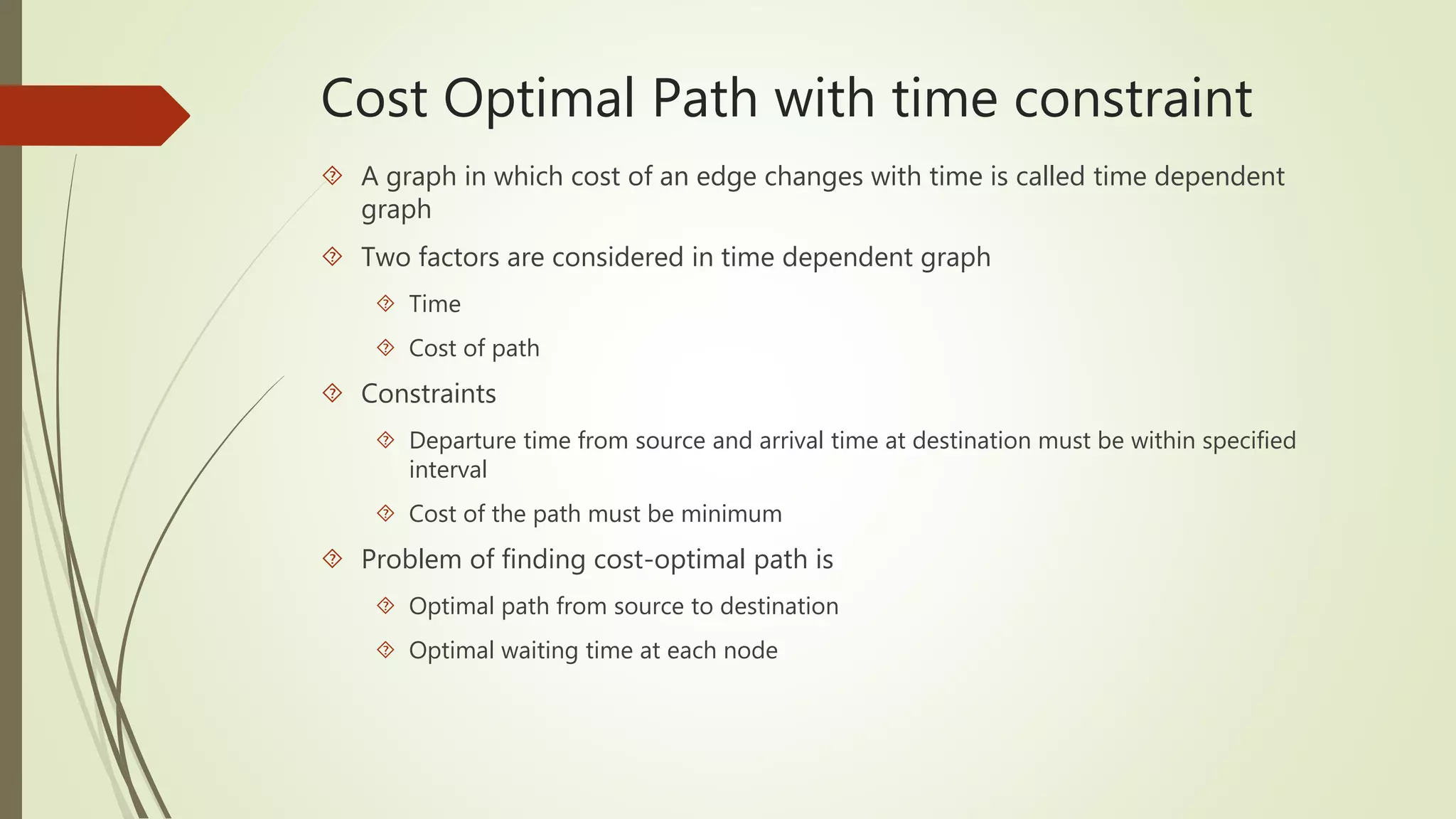
![Fastest Path
Lv – sorted list of foremost time for each node v from source node ‘s is maintained,
(s[v], a[v]), where s[v] represents start time from ‘s’ and a[v] arrival time at v
If s’[v] > s[v] and a’[v] ≤ a[v], or s’[v] = s[v] and a’[v] < a[v], then (s’[v], a’[v])
dominates (s[v], a[v])
A
1
2
1,1 2,2
B D
3
5
C E
4
5
F
6
1,3
1,4
2,5
2,6
S.No. s[v] a[v]
a 1 4
b 2 4
c 4 6
d 4 5](https://image.slidesharecdn.com/temporalgraph-141029010646-conversion-gate02/75/Temporal-graph-19-2048.jpg)
![ Earliest arrival time for each node is calculated so , λ1 = 0, λ2 =
10, λ3 = 15 and λ4 = 25 and time domain of g1(t), g2(t), g3(t) and
g4(t) are [0, 60], [10, 60], [15, 60] and [25, 60] respectively
Initially ti for all node is infinite except for source s
Priority Q is maintained containing all nodes with respect to
their ti
In first iteration, v1 is dequeued as t1= 0 is minimum
g2(t) and g3(t) are computed and v1 is removed from Q
t2 = 20 and t3 = 5 are set
In second iteration, v3, is dequeued from Q
As T3 = 30, so S3 is updated as [30,60]
g4(t) is updated and t3 = 20
In third iteration, v2 is dequeued
g3(t) and g4(t) are computed and v2 is removed from Q
Similarly v3 is dequeued again in fourth iteration and v4 is
dequeued in fifth iteration, and thus algorithm terminates](https://image.slidesharecdn.com/temporalgraph-141029010646-conversion-gate02/75/Temporal-graph-24-2048.jpg)

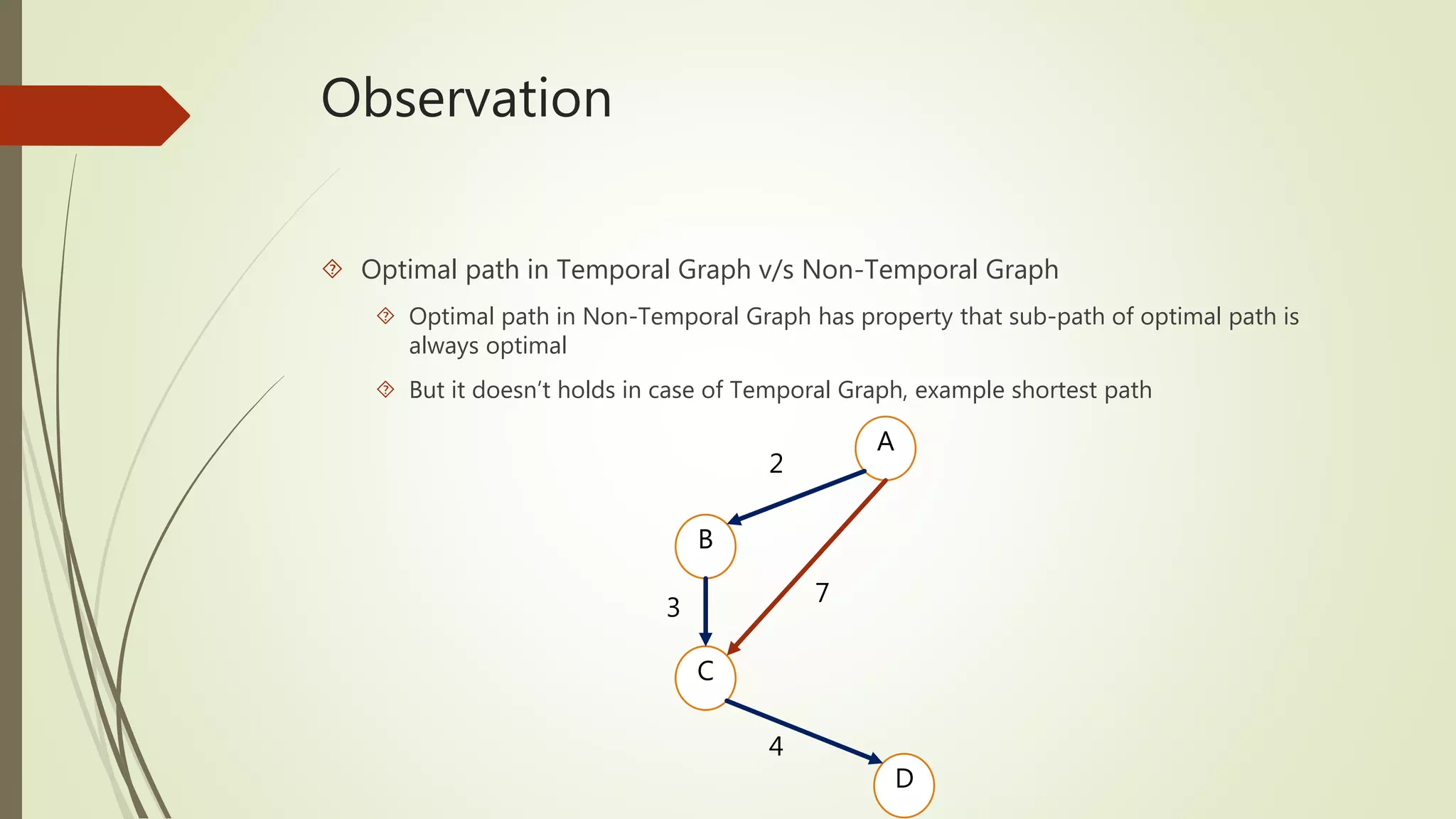
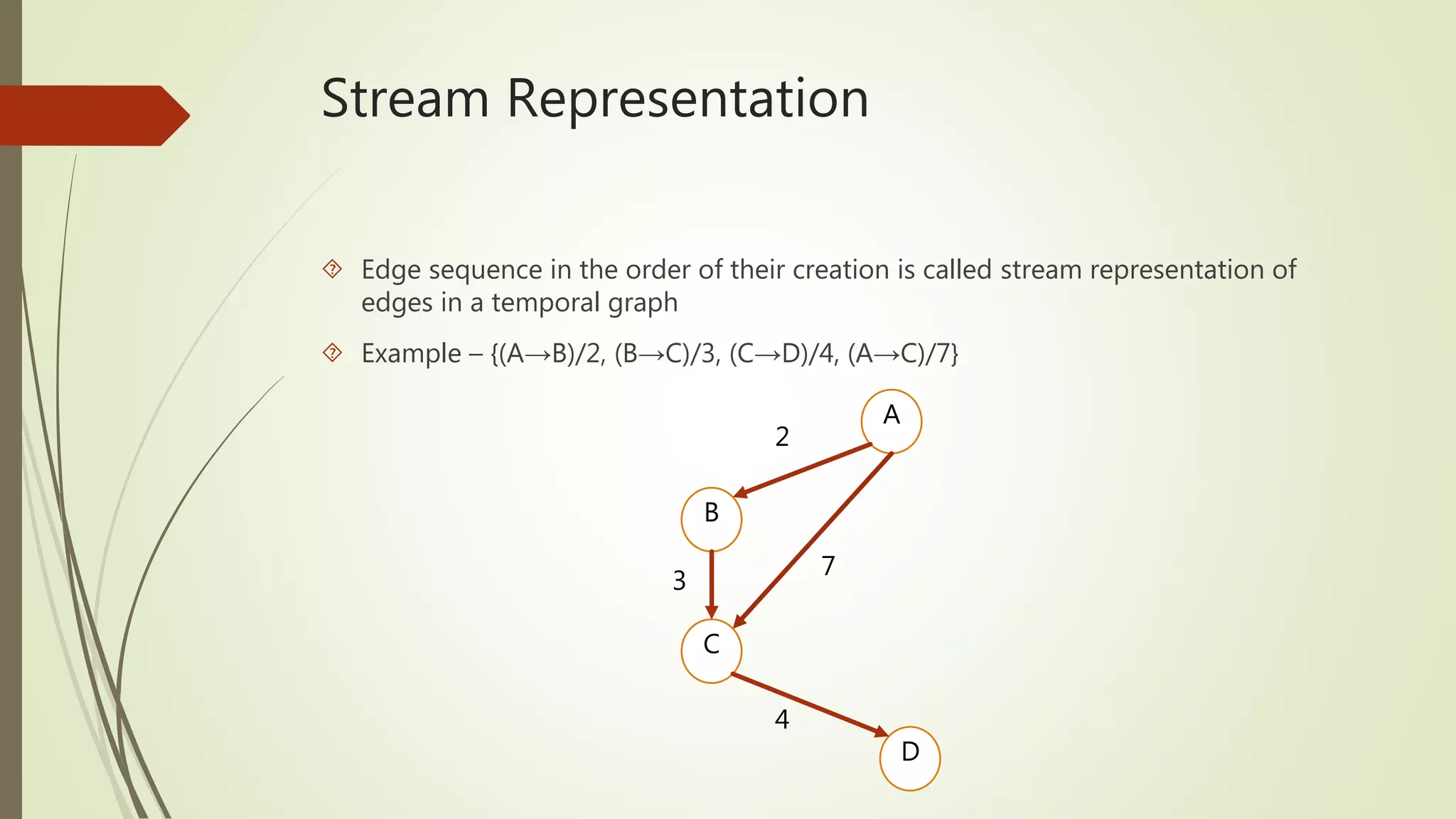
This document discusses temporal graphs, which are graphs where nodes and edges are active for specific time instances. It provides examples of temporal graphs and compares them to non-temporal graphs. It then covers temporal graph traversal methods like depth-first search and breadth-first search, accounting for temporal constraints. Various path types in temporal graphs are defined, such as foremost paths, latest-departure paths, and fastest paths. Algorithms for finding these paths using a stream representation or graph transformation approach are outlined.