Download to read offline
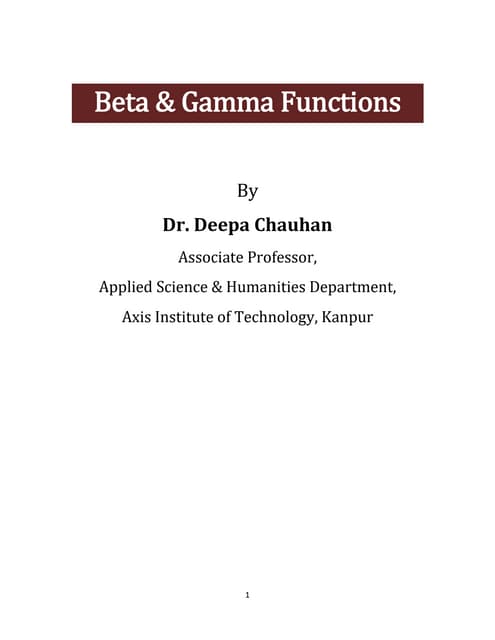
![Given the controllable system described by
𝑥( 𝑘 + 1) = [
0 0 2
2 1 −2
1 0 1
] x(k) + [
0
1
0.5
] 𝑢( 𝑘), 𝑦( 𝑘) = [1 − 1 2]
a)Find the state feedback gain matrix K so as to locate the closed loop poles at
𝑧1,2 = 0.4 ± 0.6 𝑗 𝑎𝑛𝑑 𝑧3 = −0.2
Use your results of part a) to determine the closed loop pulse transfer function. Note that the
numerators of the open and closed loop (after state feedback) pulse transfer functions are the
same.
Solution:-
CON = [ H G*H G*G*H] = [
0 1 1
1 0 1
0.5 0.5 1.5
] CON-1 = [
1 2 −2
2 1 −2
−1 −1 2
]
CON-1 * G * CON = [
1 2 −2
2 1 −2
−1 −1 2
] [
0 0 2
2 1 −2
1 0 1
] [
0 1 1
1 0 1
0.5 0.5 1.5
] = [
0 0 −2
1 0 1
0 1 2
]
−𝑎3
−𝑎2
−𝑎1
The transformation matrix M = [
𝑎2 𝑎1 1
𝑎1 1 0
1 0 0
] = [
−1 −2 1
−2 1 0
1 0 0
], M-1 = [
0 0 1
0 1 2
1 2 3
]
Therefore, P = CON * M = [
−1 1 0
0 −2 1
0 −0.5 0.5
] and P-1 = M-1 * CON-1 = [
−1 −1 2
0 −1 2
0 −1 4
]
Thus, we have
𝑥̃( 𝑘 + 1) = P-1 G P 𝑥̃( 𝑘) + P-1 h u(k) = [
0 1 0
0 0 1
−2 1 2
] 𝑥̃( 𝑘) + [
0
0
1
] u(k)
The closed loop characteristic equation is given by
Z
3 + α1 z2 + α2 z + α3 = ( z – 0.4 + 0.6 j ) ( z – 0.4 - 0.6 j ) ( z + 0.2)
= z3 -0.6 z2 + 0.36 z + 0.104
Therefore,
𝐾̃ = [ (∝3- 𝑎3 ) (∝2- 𝑎2 ) (∝1- 𝑎1 ) ] = [ -1.896 1.36 1.4]
u(k) == r(k) - 𝐾̃ 𝑥̃( 𝑘) = 𝑟( 𝑘) − 𝐾̃ 𝑃−1
x(k) ==.> or K= 𝐾̃ P-1
K = [ 1.696 -0.864 4.528]](https://image.slidesharecdn.com/statefeedbackexample-200826113243/75/State-feedback-example-1-2048.jpg)
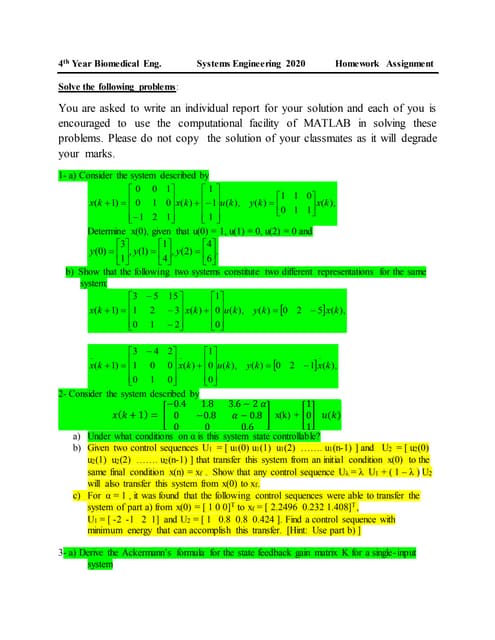
![b) The standard controllable form of the system before feedback is given by
𝑥̃ ( 𝑘 + 1) = 𝑃−1
𝐺 𝑃 𝑥̃( 𝑘)+ 𝑃−1
ℎ 𝑢( 𝑘) , 𝑦( 𝑘) = 𝐶 𝑃 𝑥̃(𝑘)
𝑥̃ ( 𝑘 + 1) = [
0 1 0
0 0 1
−2 1 2
] 𝑥̃( 𝑘) + [
0
0
1
] u(k), y(k) = [1 − 1 2] [
−1 1 0
0 −2 1
0 −0.5 0.5
] 𝑥̃( 𝑘)
y(k) = [-1 2 0] 𝑥̃( 𝑘)
Thus
𝑌(𝑧)
𝑈(𝑧)
=
2 𝑧 −1
𝑧3 −2 𝑧2− 𝑧 +1
And the closed loop transfer function will be
𝑌(𝑧)
𝑅 (𝑧)
=
2 𝑧 −1
𝑧3 −0.6 𝑧2+0.36 𝑧 +0.104](https://image.slidesharecdn.com/statefeedbackexample-200826113243/75/State-feedback-example-2-2048.jpg)

The document finds the state feedback gain matrix K to place the closed loop poles at specific locations for a controllable system. It first transforms the system into controllable canonical form, then calculates K using the characteristic equation. The closed loop transfer function is determined to be a 3rd order function divided by a 3rd order polynomial with coefficients matching the desired closed loop poles.