Downloaded 22 times

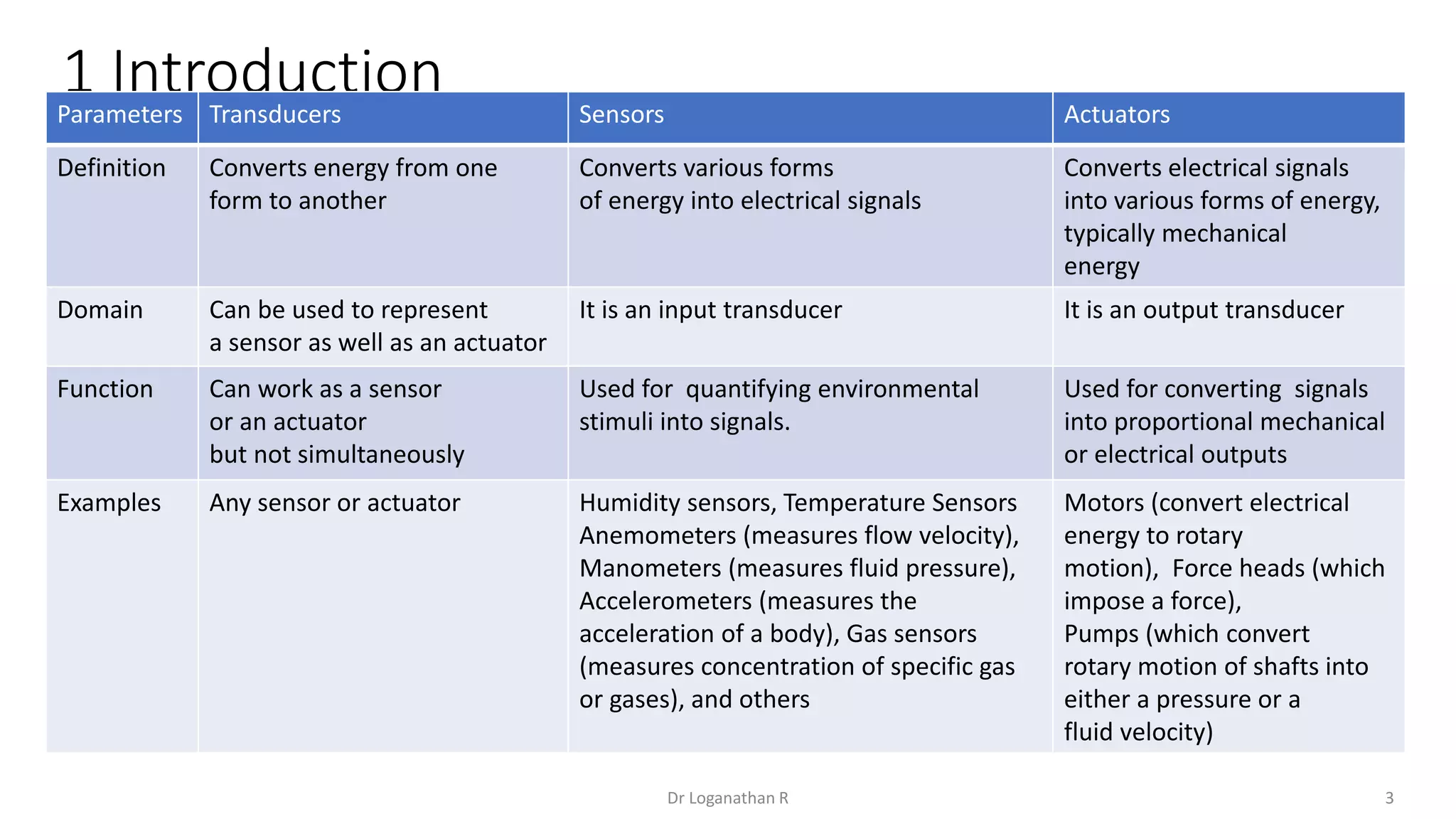















This document discusses IoT sensing and actuation. It defines transduction as the process of energy conversion from one form to another. Sensors convert various forms of energy into electrical signals, while actuators convert electrical signals into various forms of energy, typically mechanical energy. The document describes different types of sensors and their characteristics like resolution, accuracy, and precision. It also discusses sensor errors and deviations. Finally, it categorizes sensing into four types - scalar sensing, multimedia sensing, hybrid sensing, and virtual sensing - based on the nature of the environment being sensed.
Overview of IoT, transduction process, transducers, sensors, and actuators with definitions.
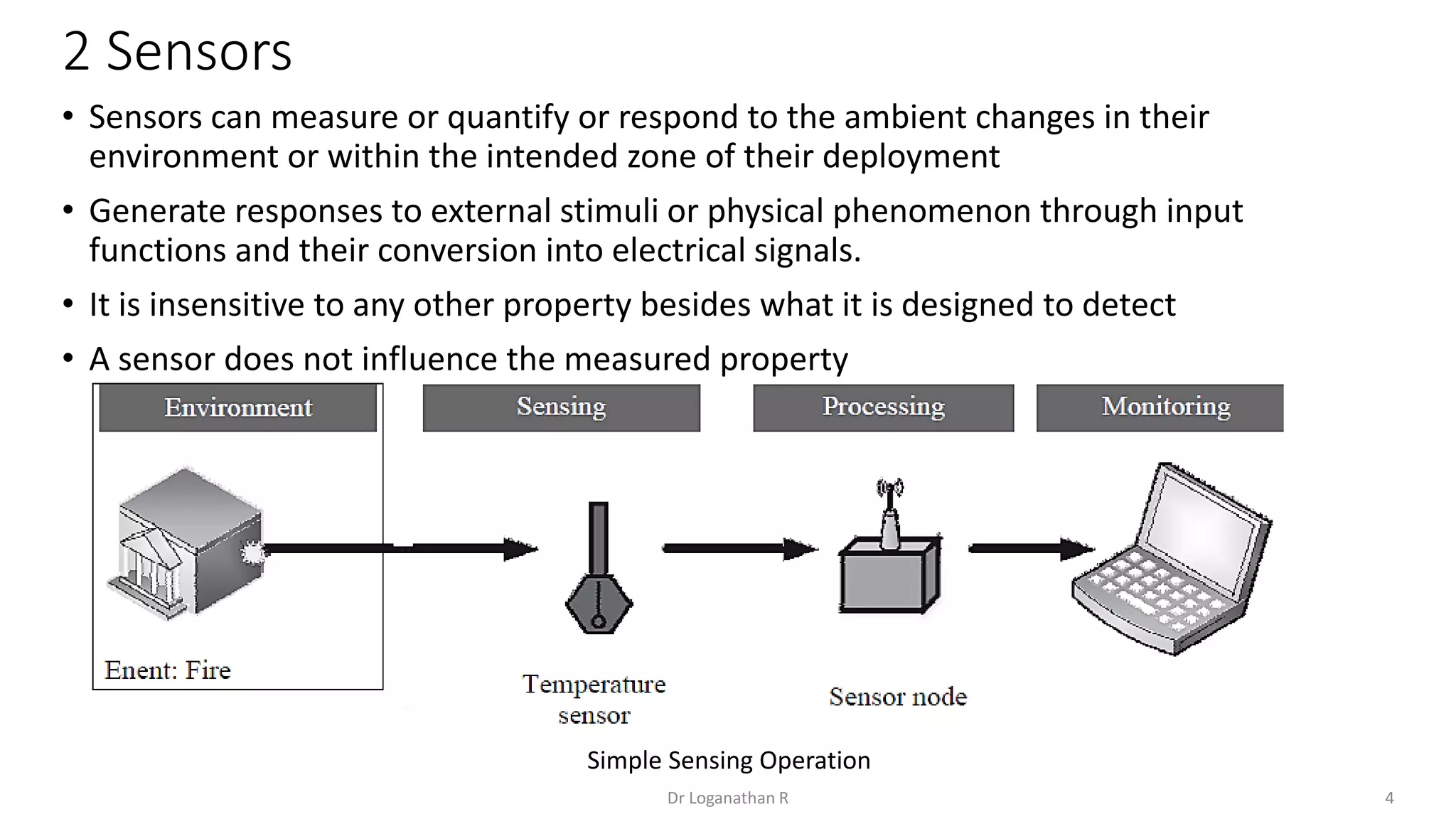
Explanation of sensors, their classification by power requirements, outputs, and properties measured.
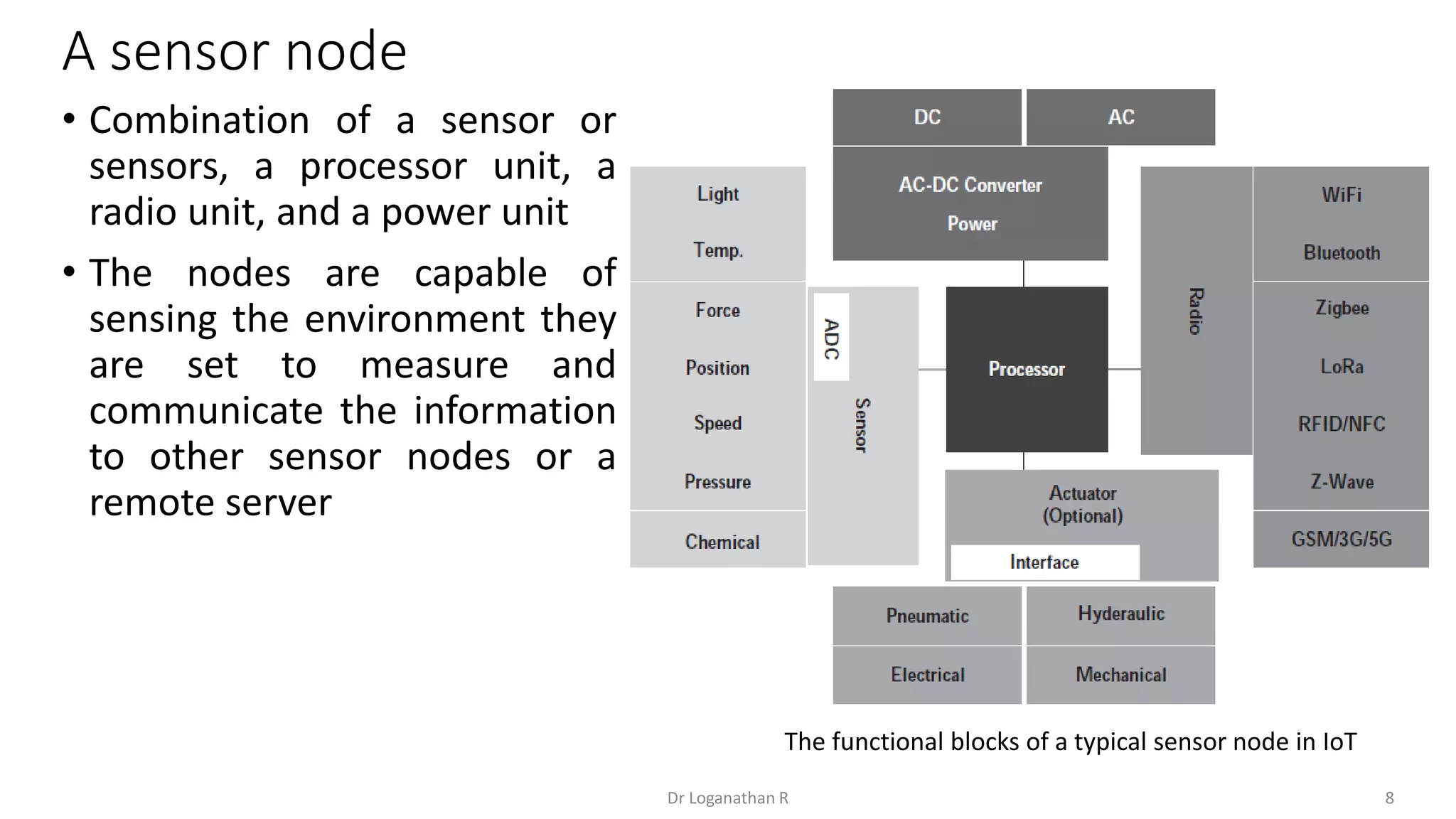
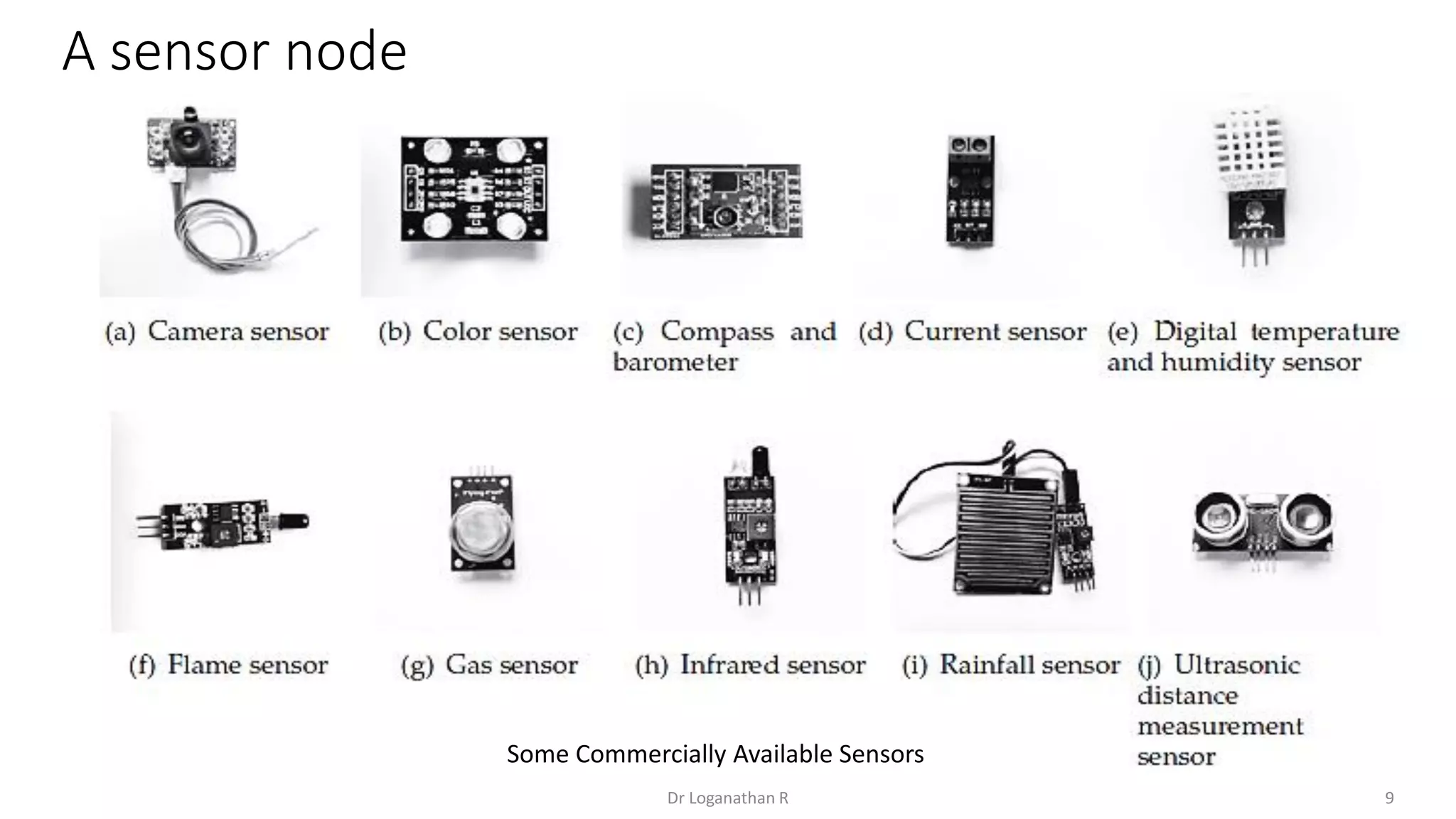
Description of a sensor node as composed of various units and examples of commercially available sensors.
Key properties of sensors: resolution, accuracy, precision, and various error types affecting sensors.
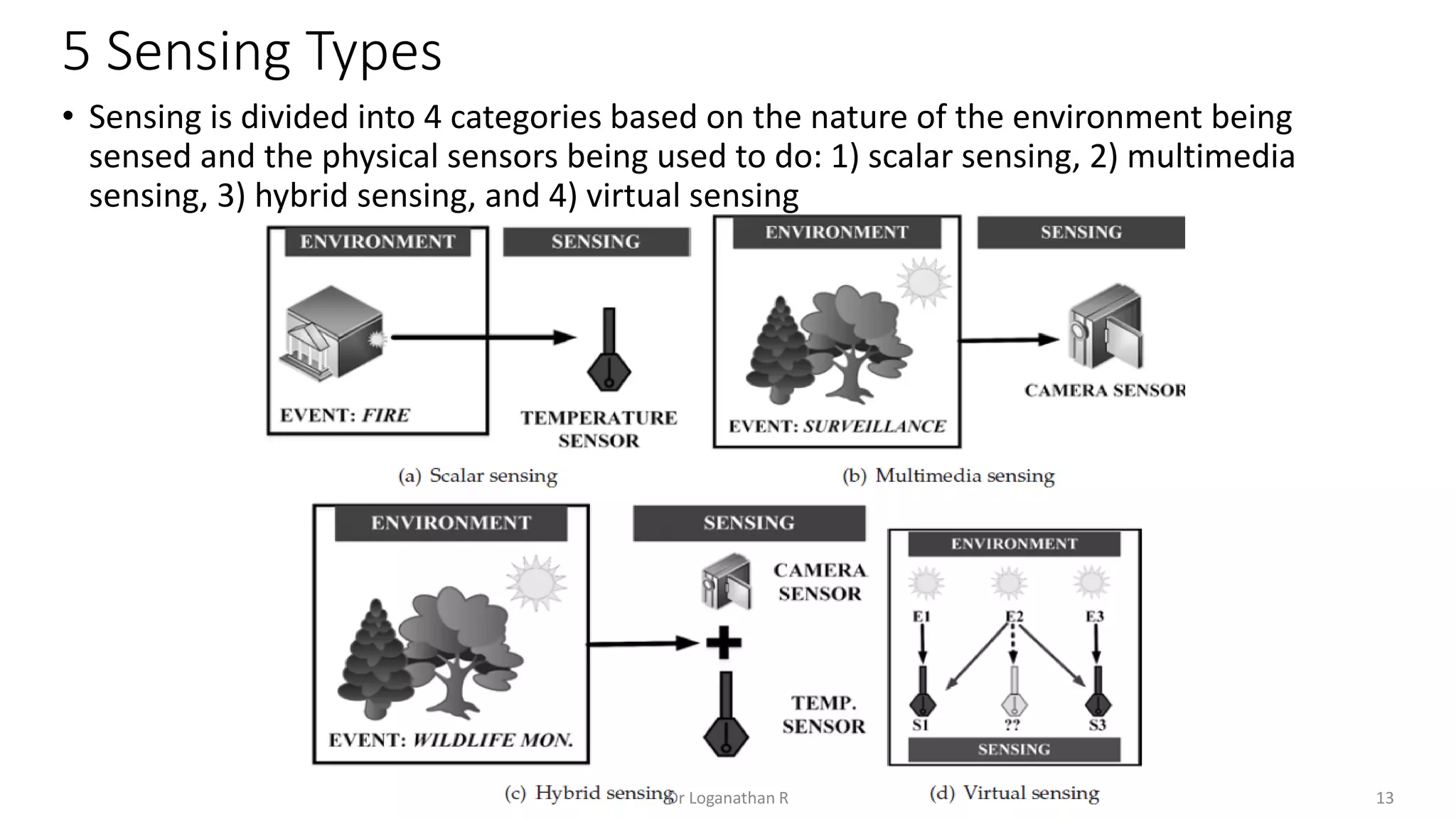
Four sensing categories: scalar, multimedia, hybrid, and virtual sensing with examples for each.
Major factors for choosing sensors in IoT: sensing range, accuracy, energy, and device size.
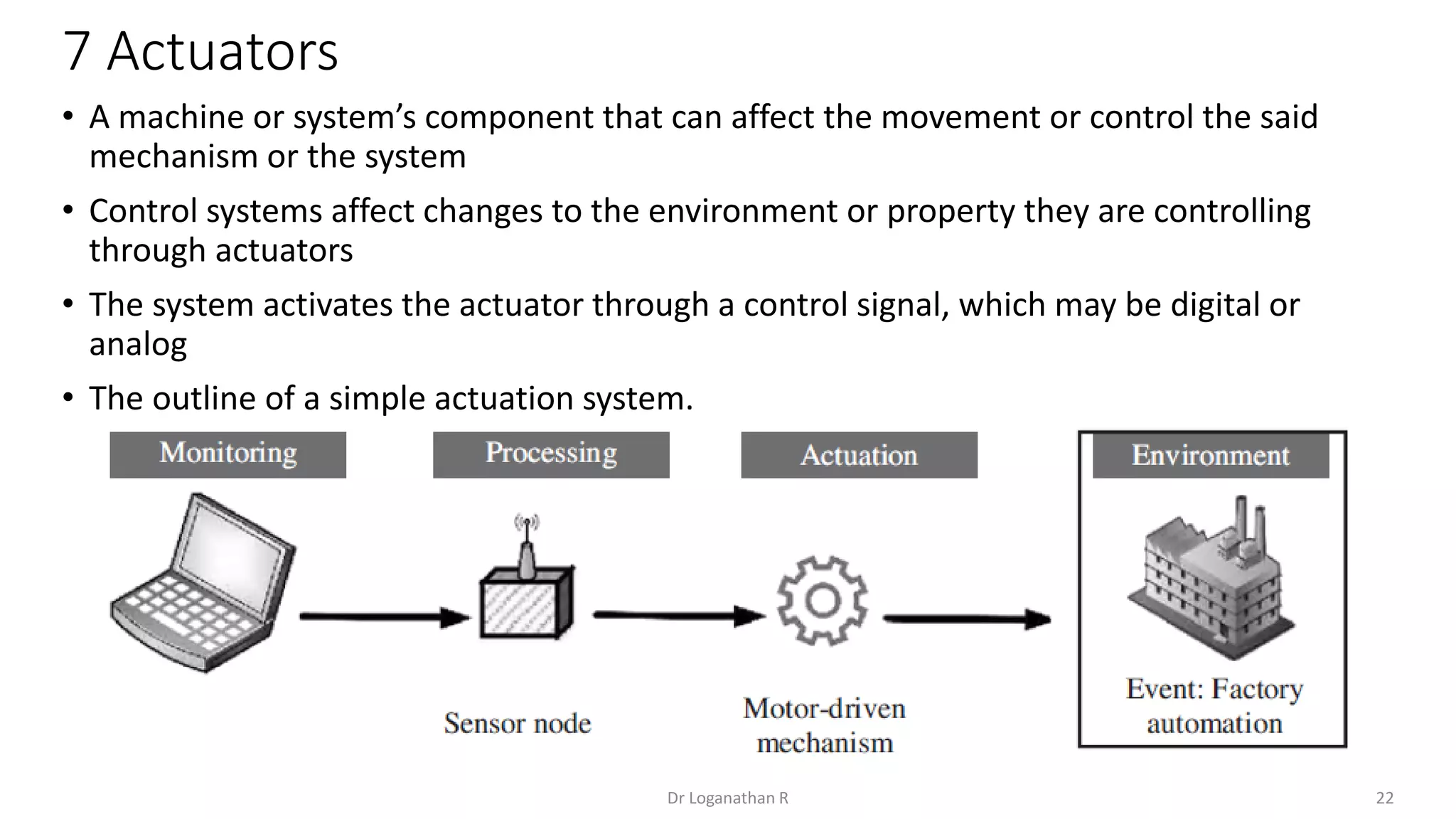
Definition and function of actuators within control systems for affecting environmental changes.
Overview of seven actuator classes including hydraulic, pneumatic, electric, and shape memory polymers.
Characteristics of actuators: weight, power rating, torque to weight ratio, stiffness, and compliance.