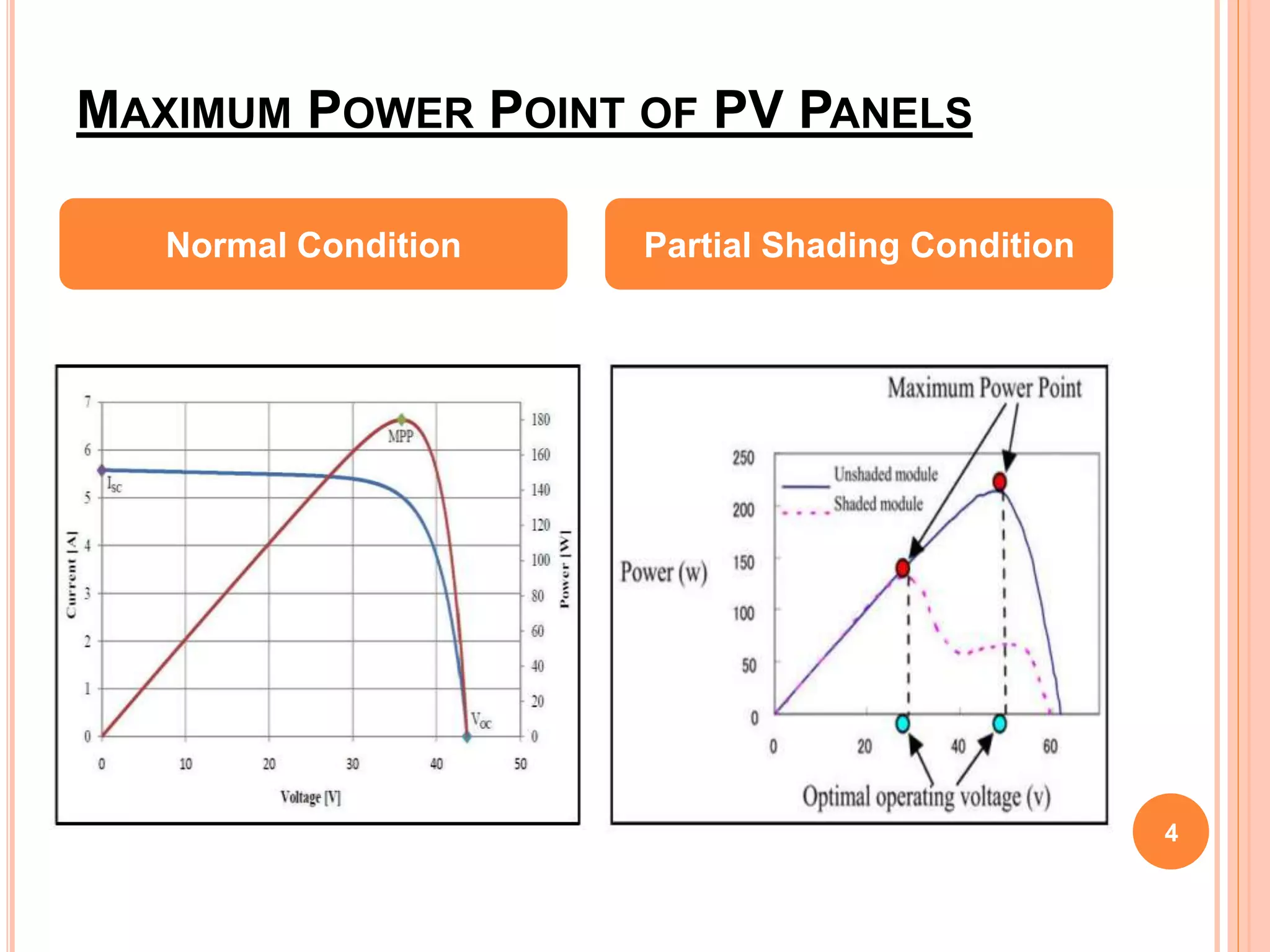
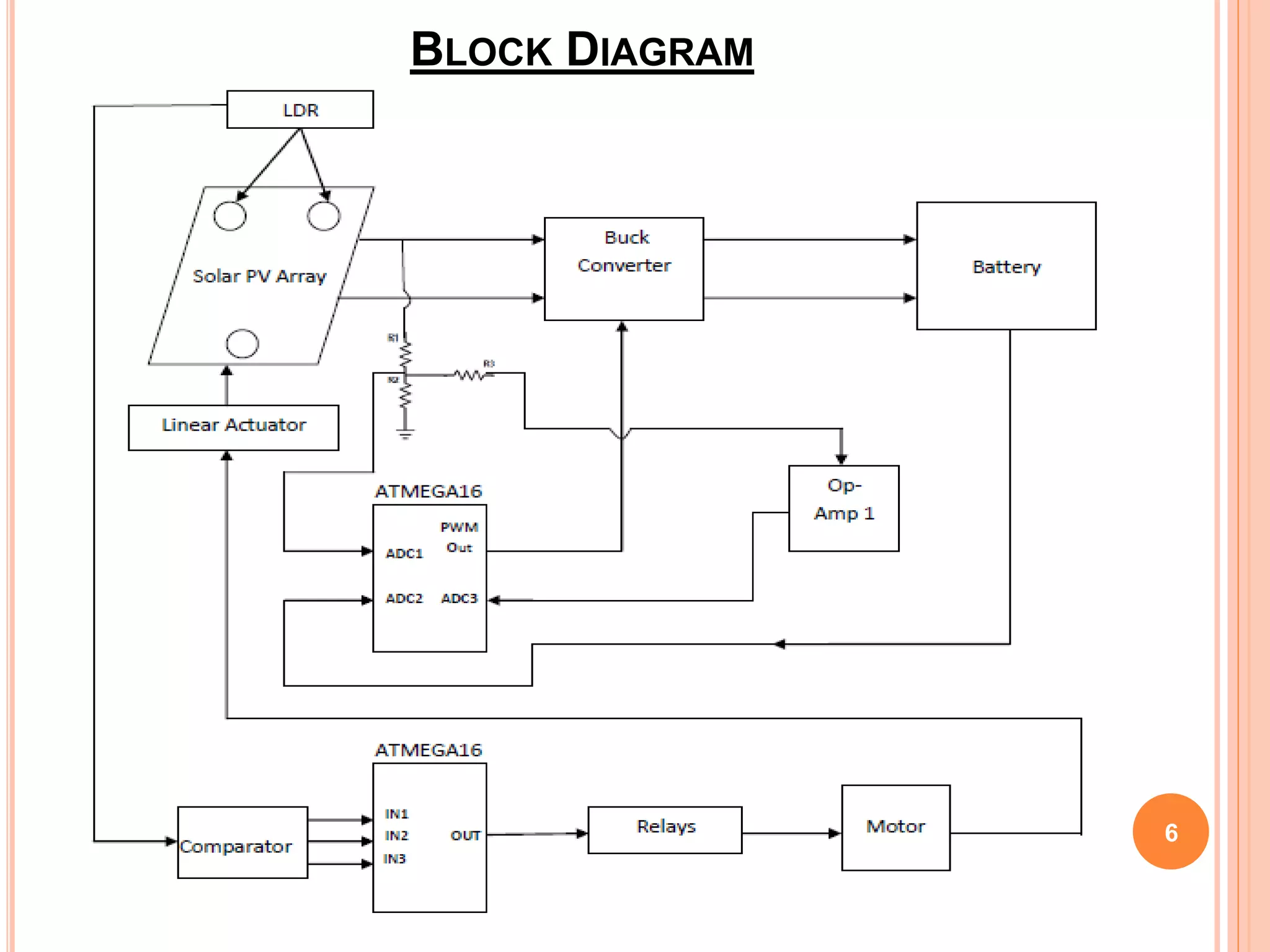
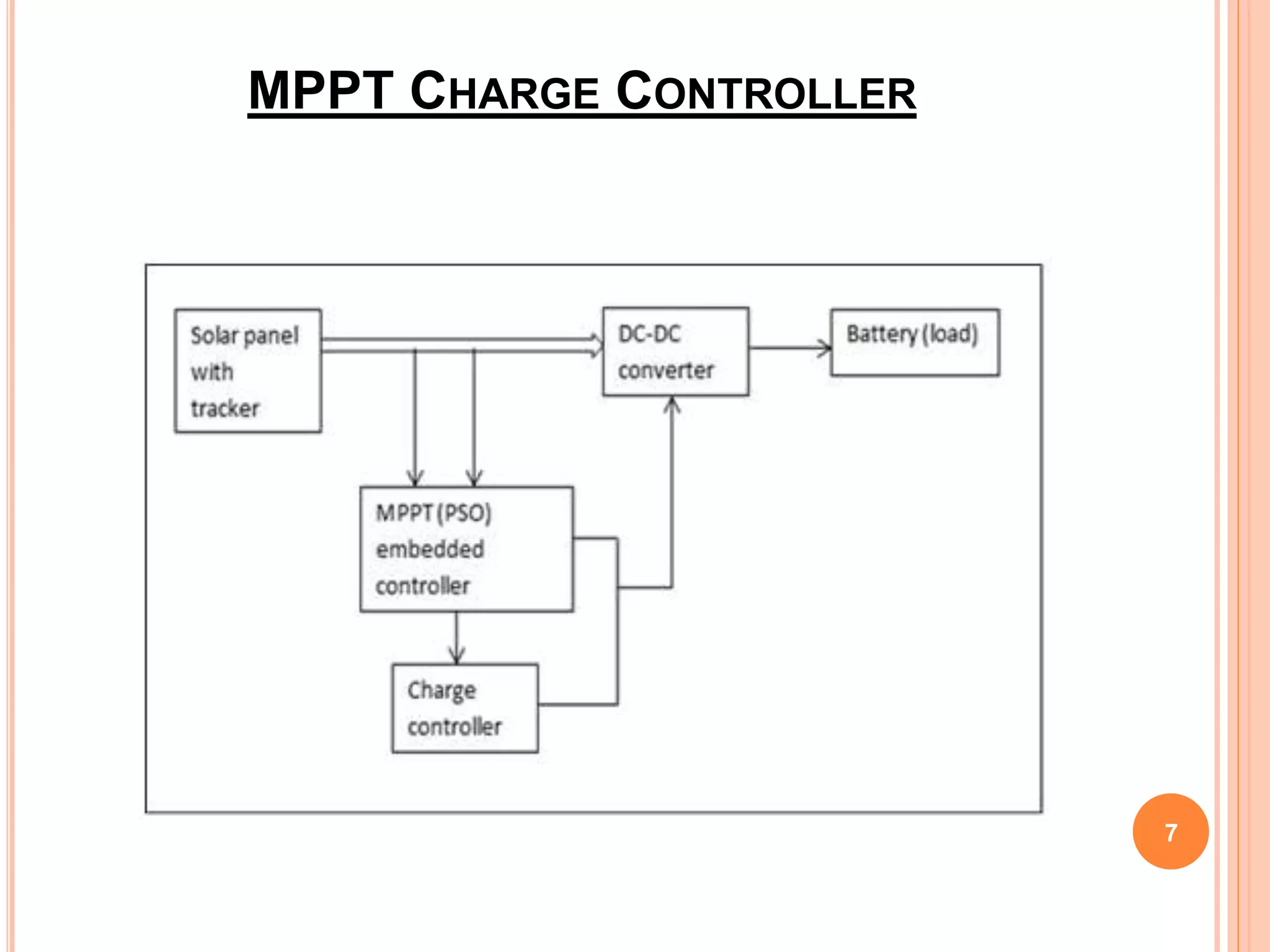
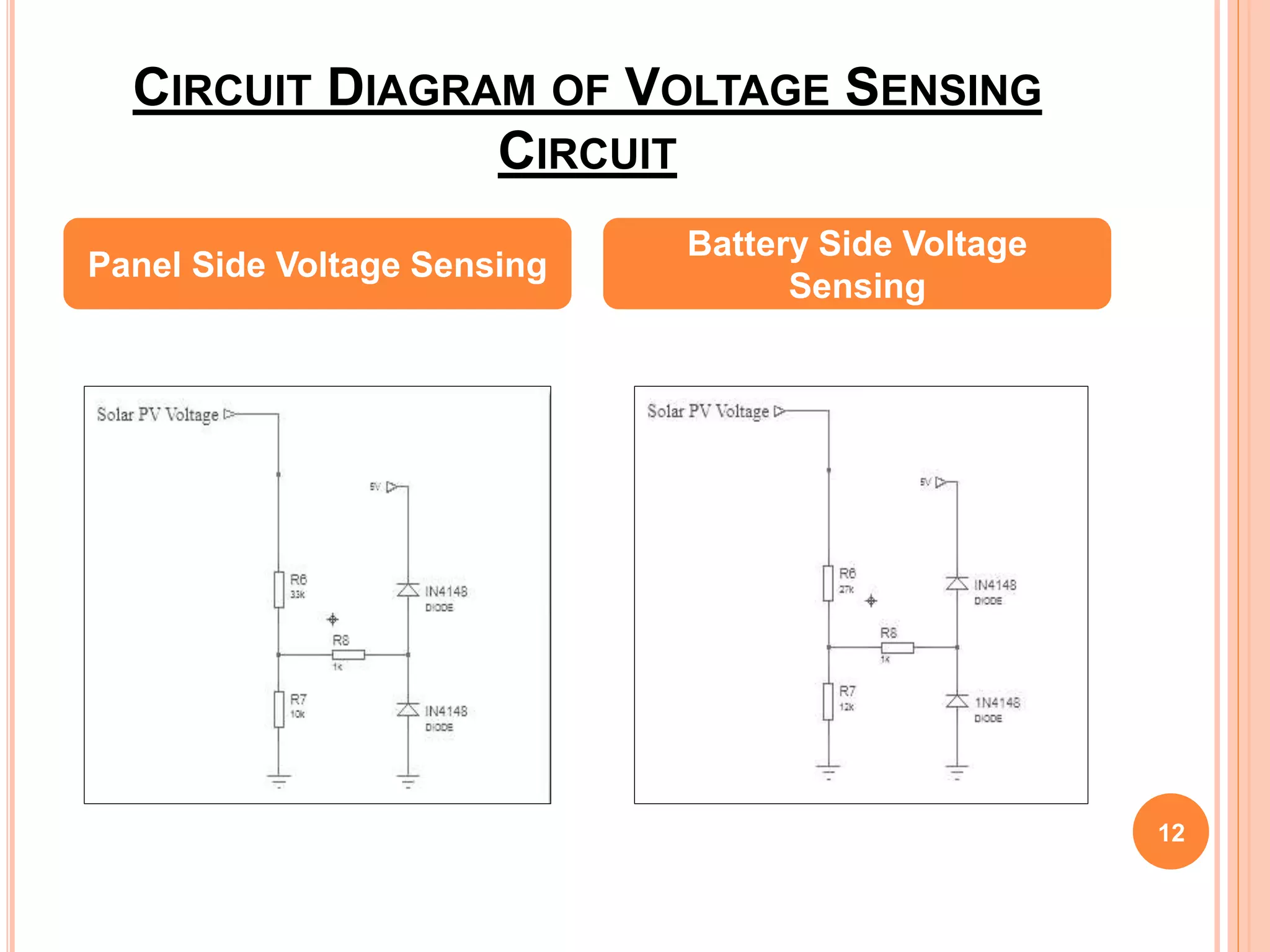
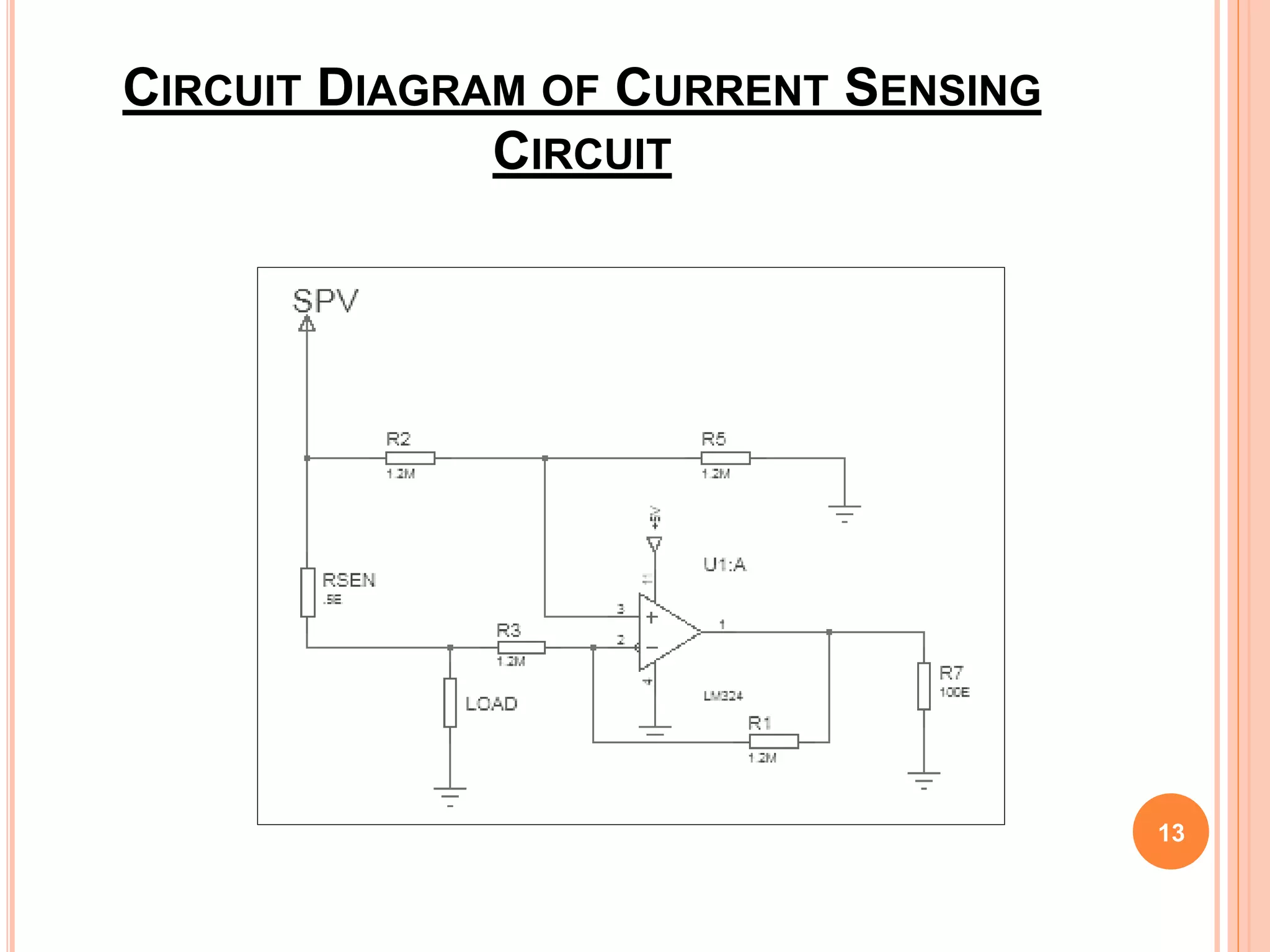
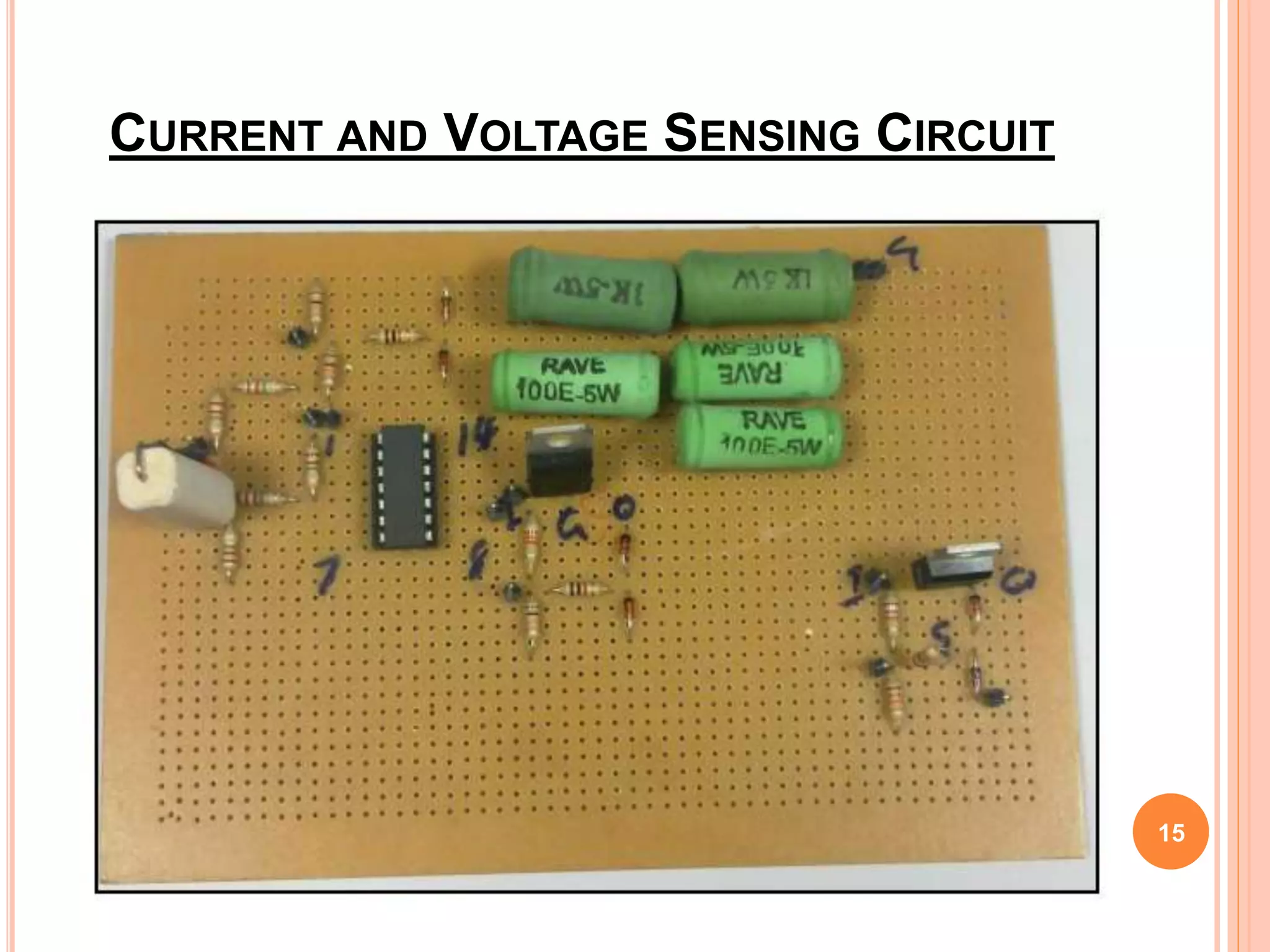
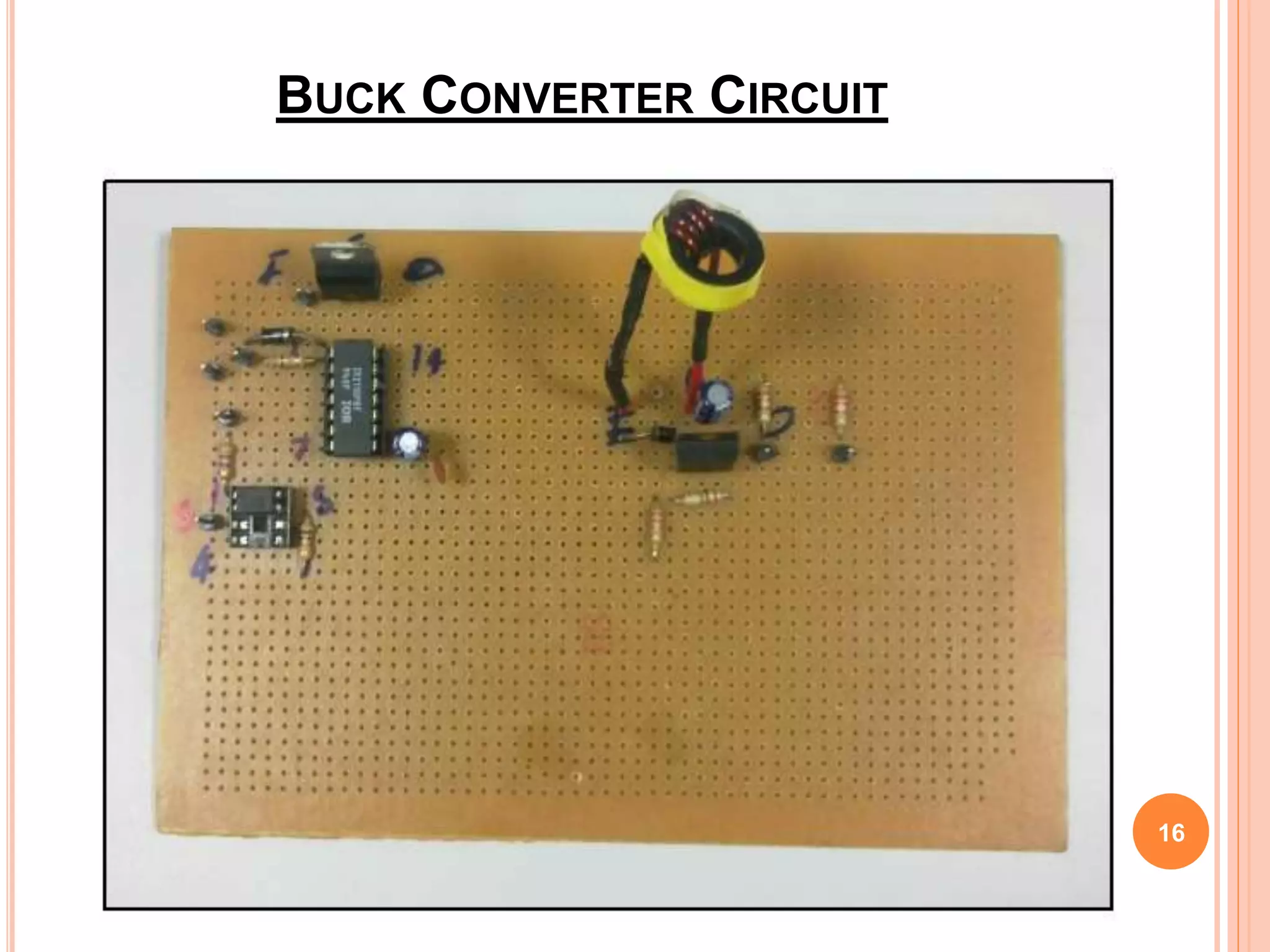
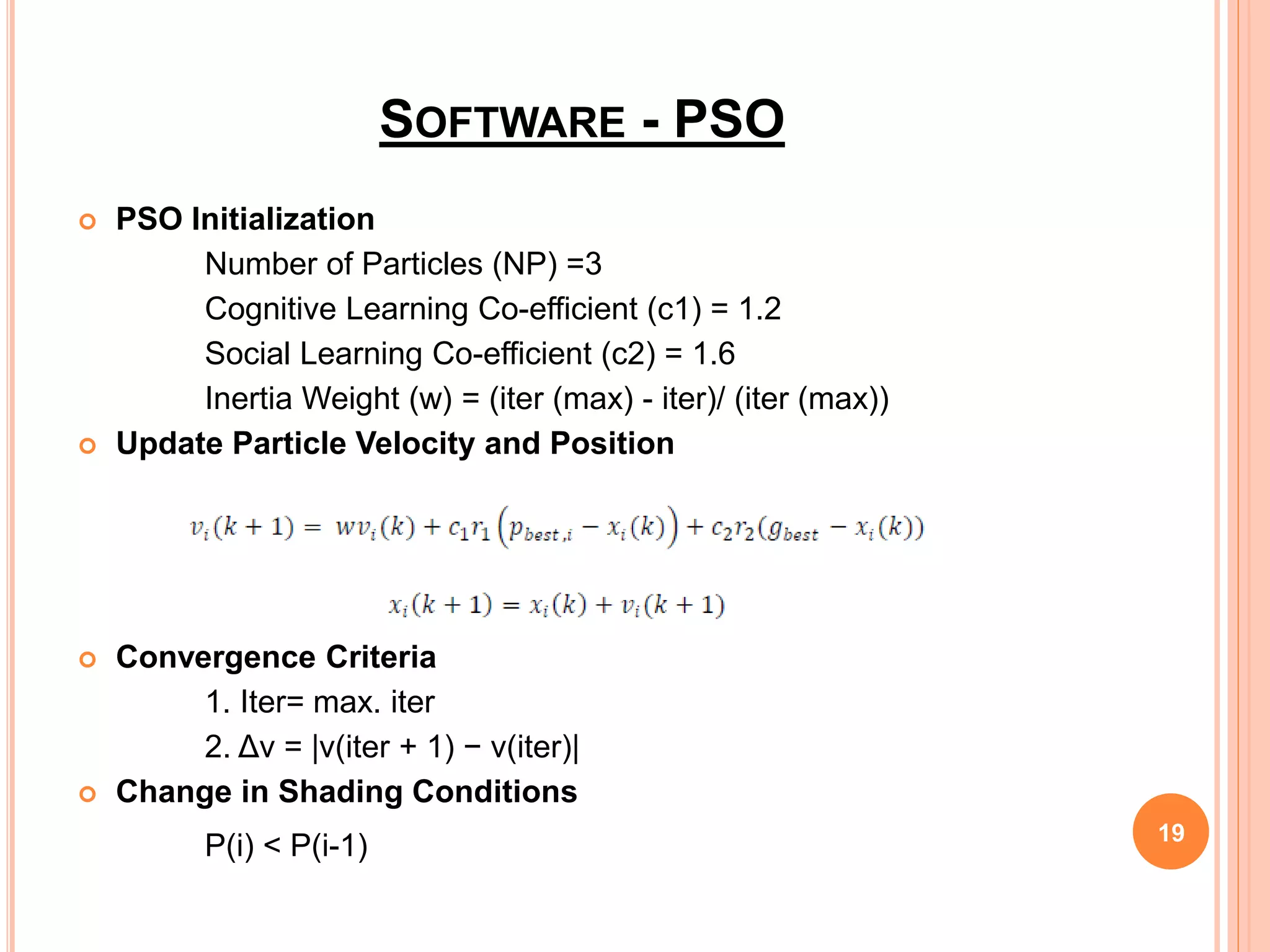
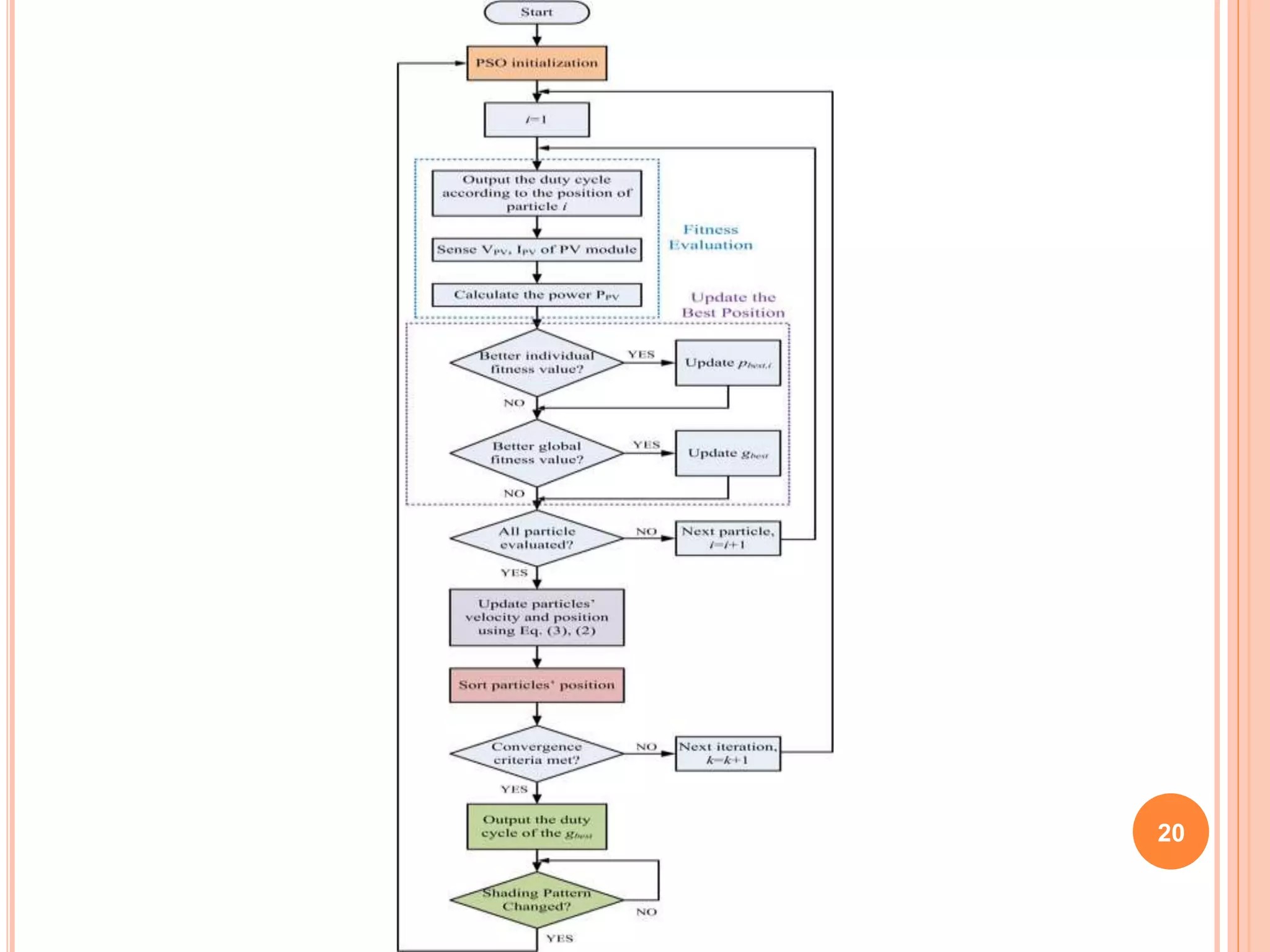
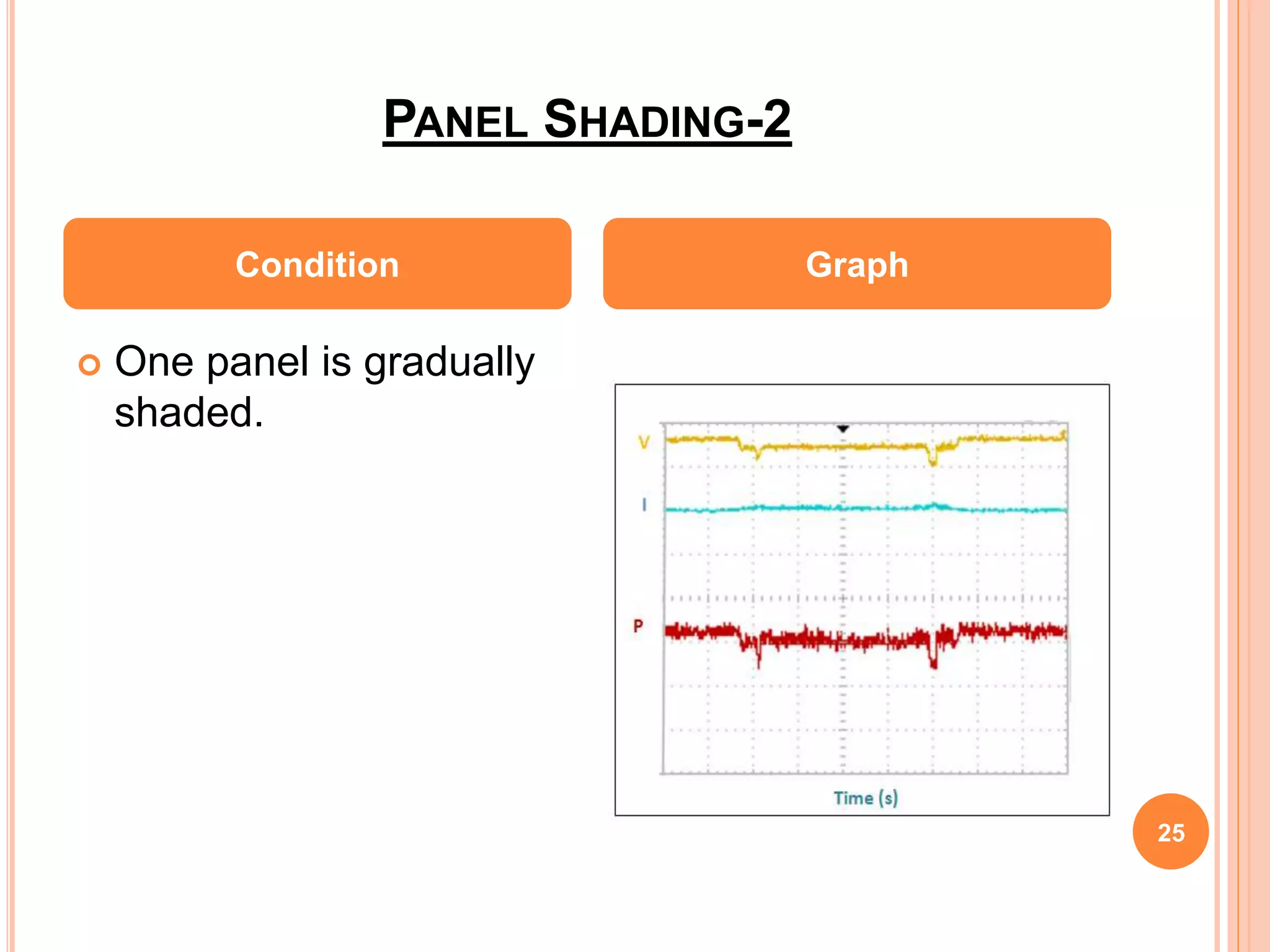
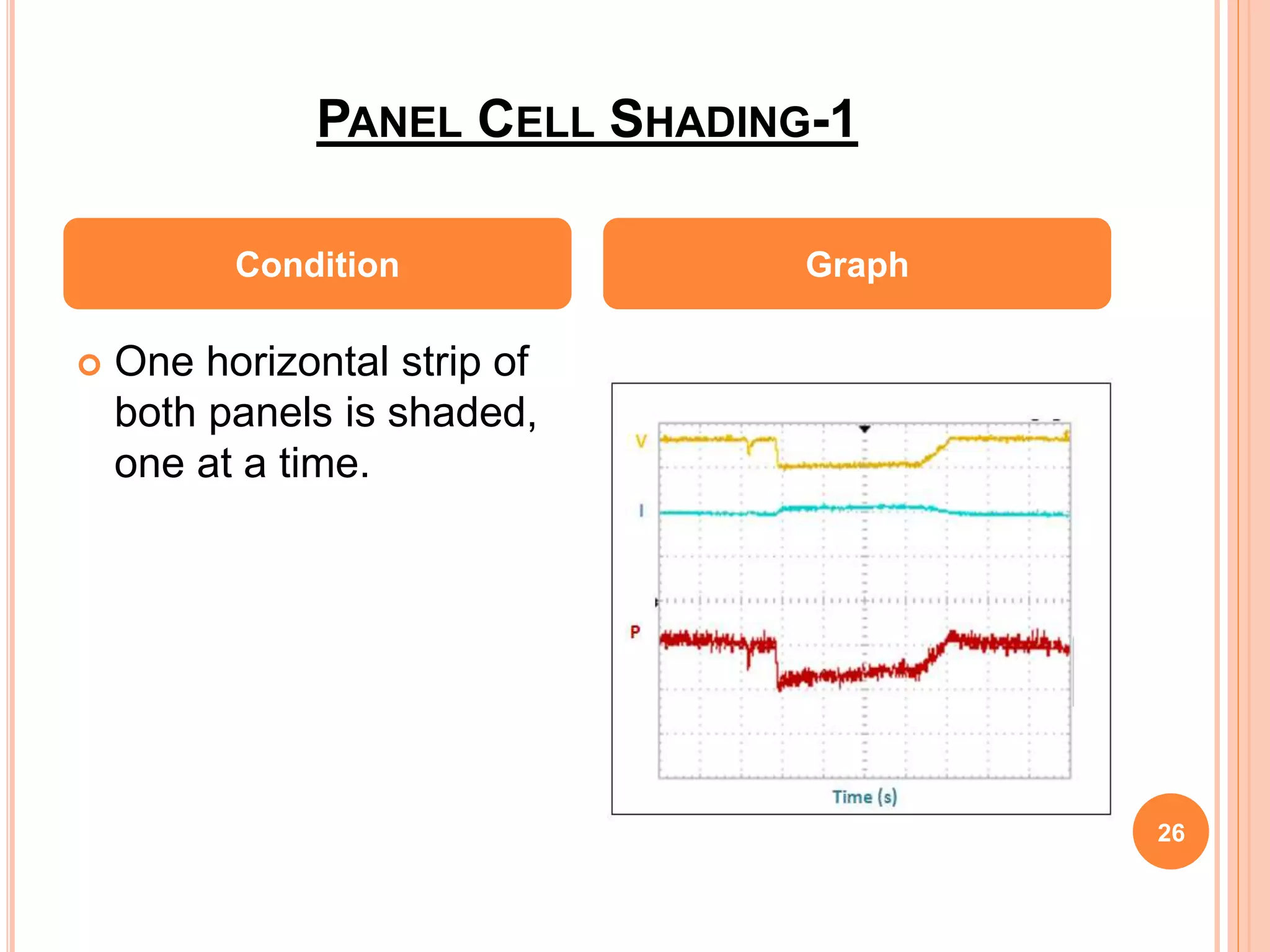
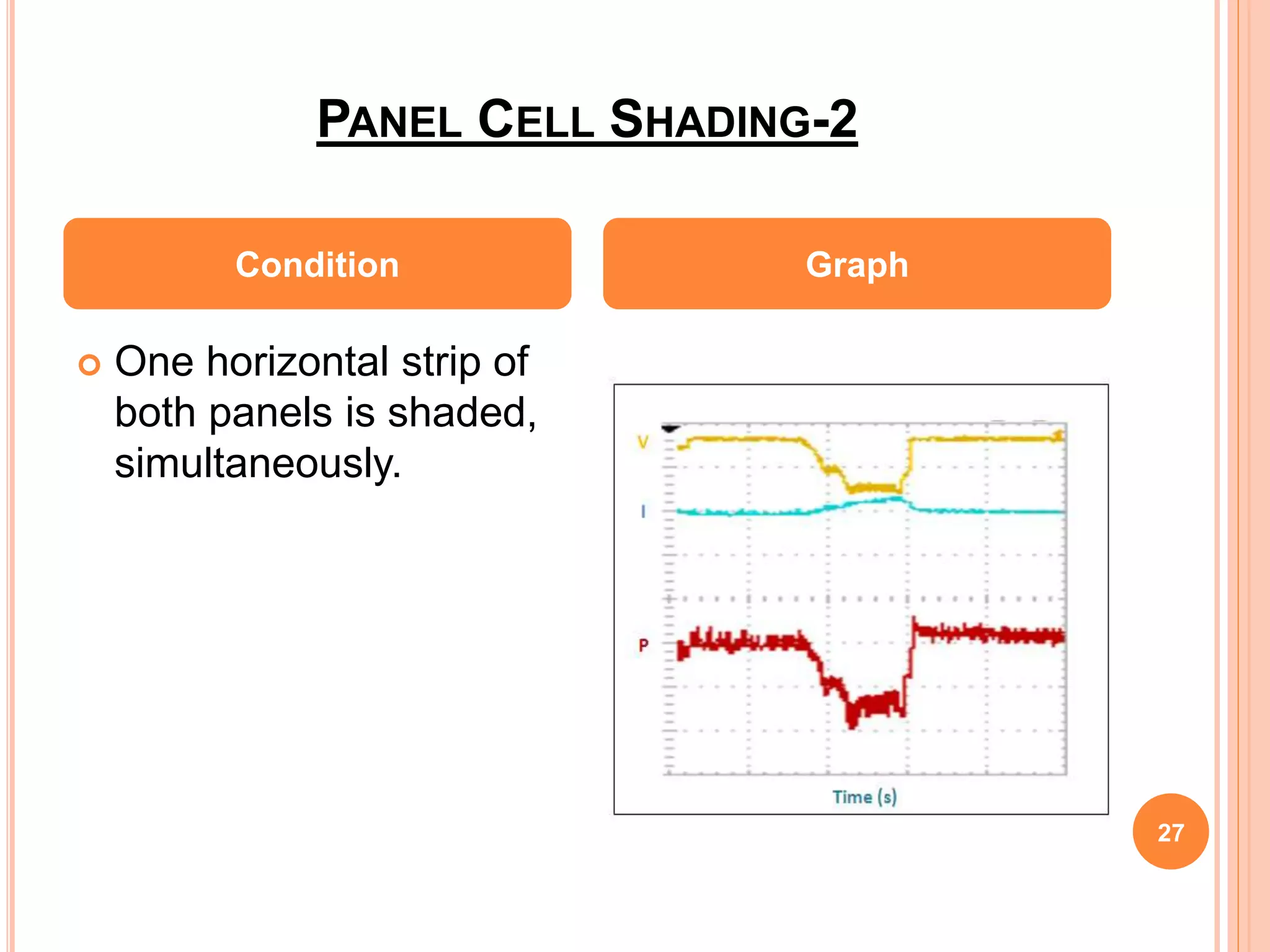
This document describes a student project to build a single axis solar tracker using a modified particle swarm optimization maximum power point tracking (PSO-MPPT) algorithm. It includes sections on maximum power point of PV panels, different MPPT algorithms including PSO, the block diagram, charge controller, buck converter, solar tracker, voltage/current sensing circuits, hardware implementation, the PSO software, and test results. The results show the solar tracker effectively tracked the sun and the PSO-MPPT algorithm found the maximum power point under different lighting conditions including partial shading. The hardware implementation matched the performance in the reference paper on PSO-based MPPT.














































![[Codientu.org] design of a charge controller circuit](https://cdn.slidesharecdn.com/ss_thumbnails/codientu-180501080259-thumbnail.jpg?width=640&height=640&fit=bounds)