Downloaded 133 times
















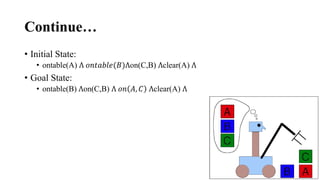


















































1. Planning involves finding a sequence of actions that achieves a goal starting from an initial state. It uses a set of operators that define the possible actions and their effects. 2. A plan is a sequence of operator instances that transforms the initial state into a goal state. Classical planning assumes fully observable, deterministic environments. 3. Planning problems can be represented using a logical language that describes states, goals, actions and their preconditions and effects. This representation allows planning algorithms to operate over problems.

















































































![Attack surfaces and attack tress[inform]](https://cdn.slidesharecdn.com/ss_thumbnails/lecture03-260108015941-a4dee53b-thumbnail.jpg?width=640&height=640&fit=bounds)

