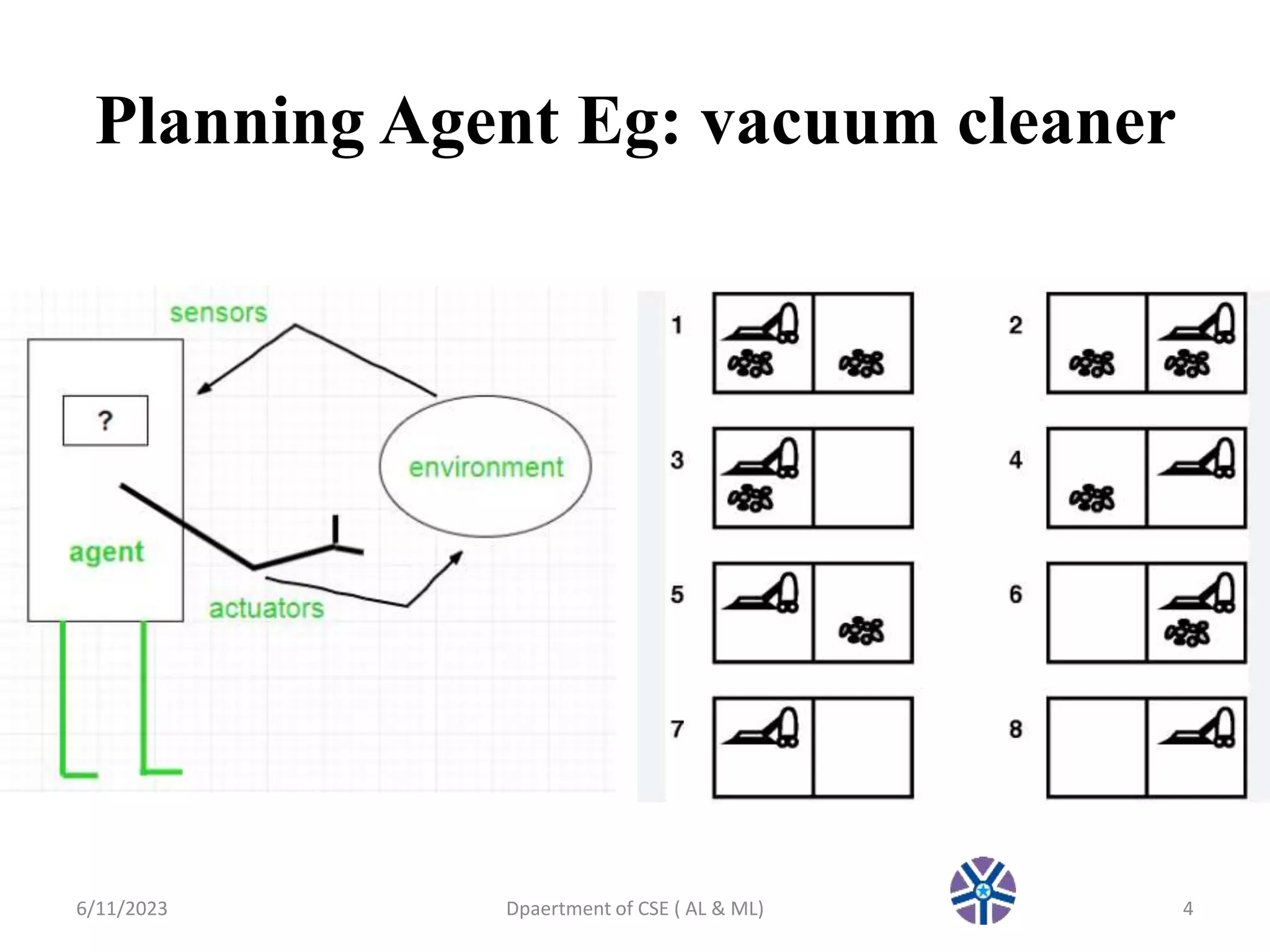
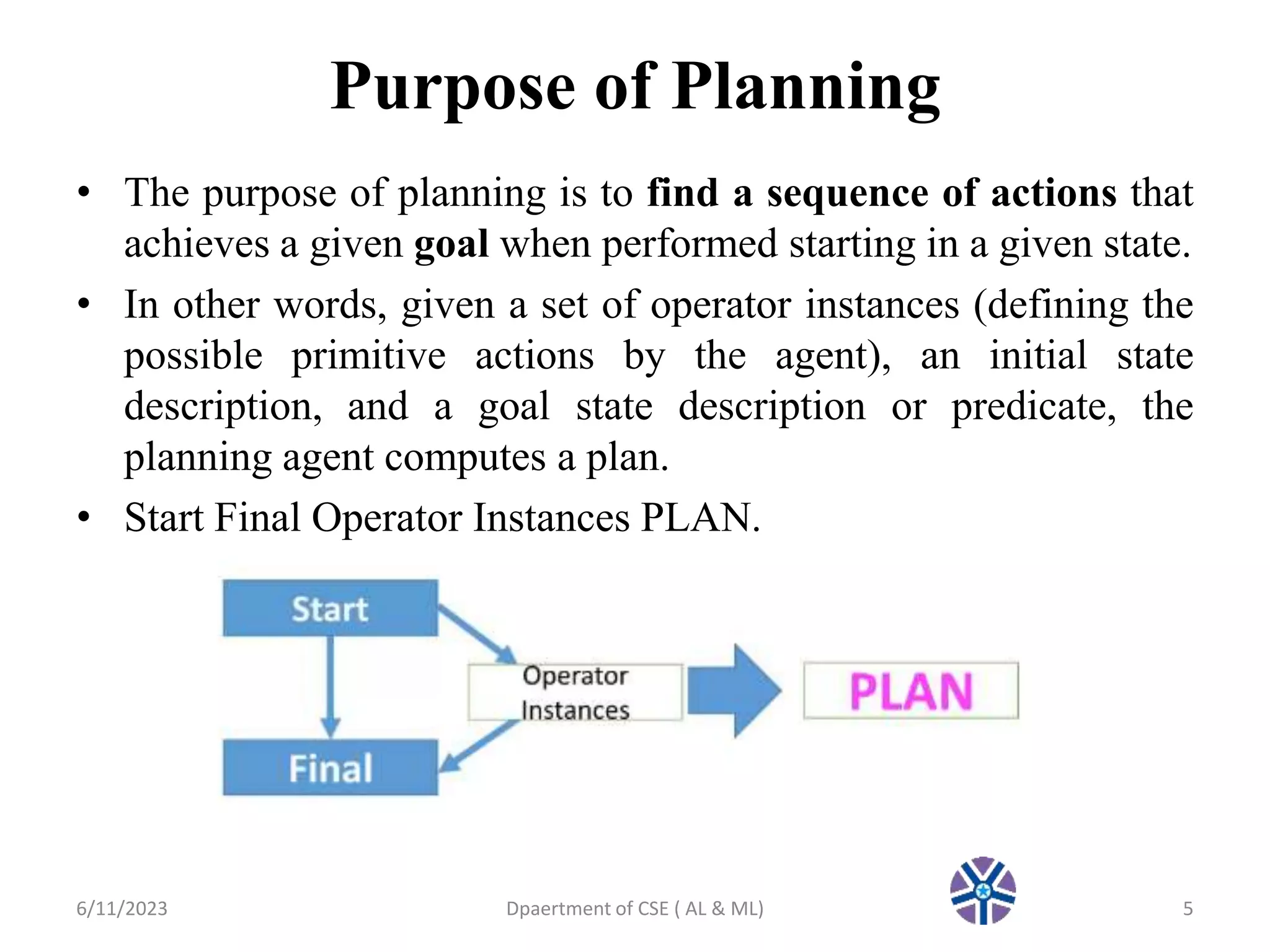
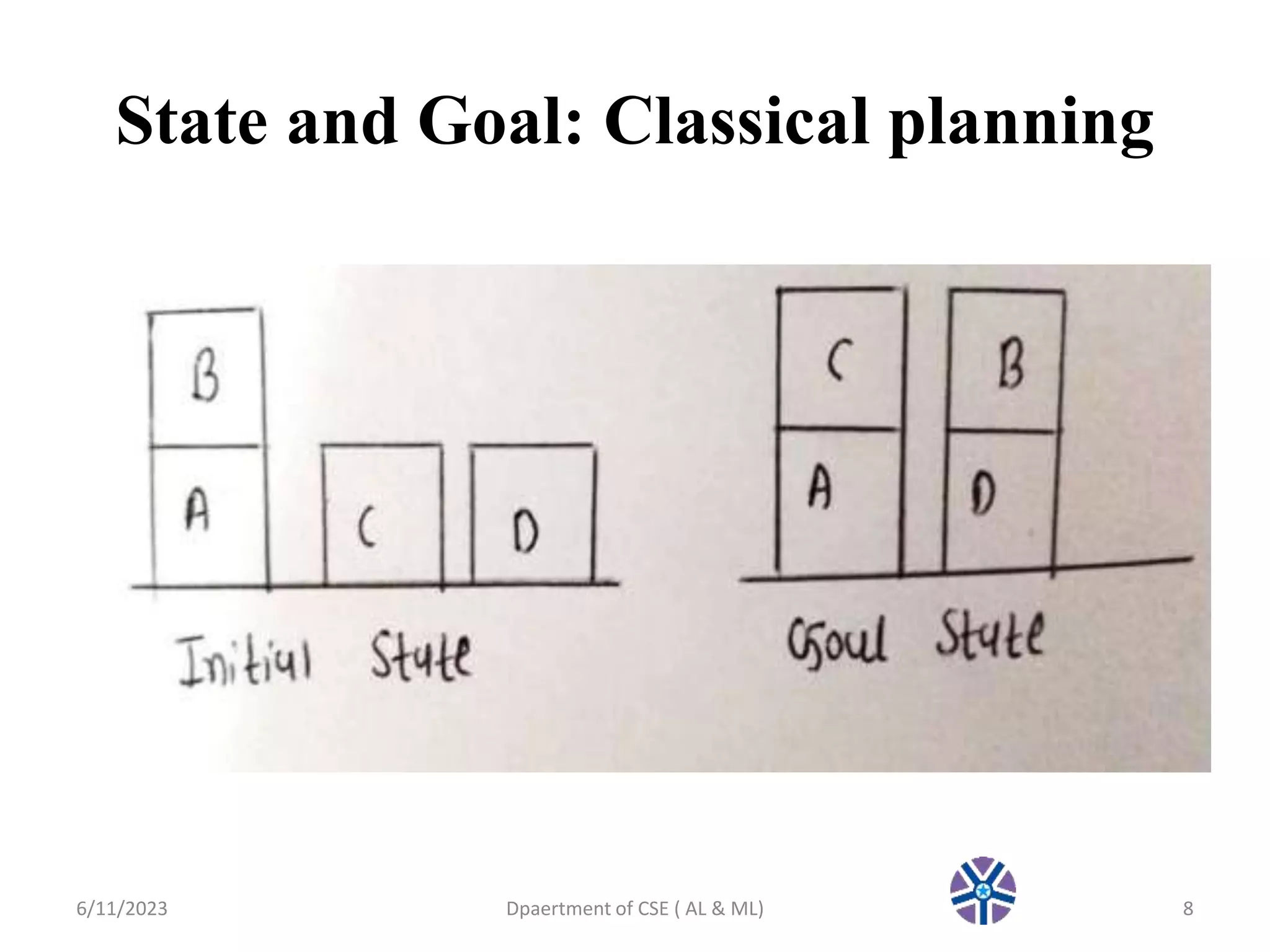
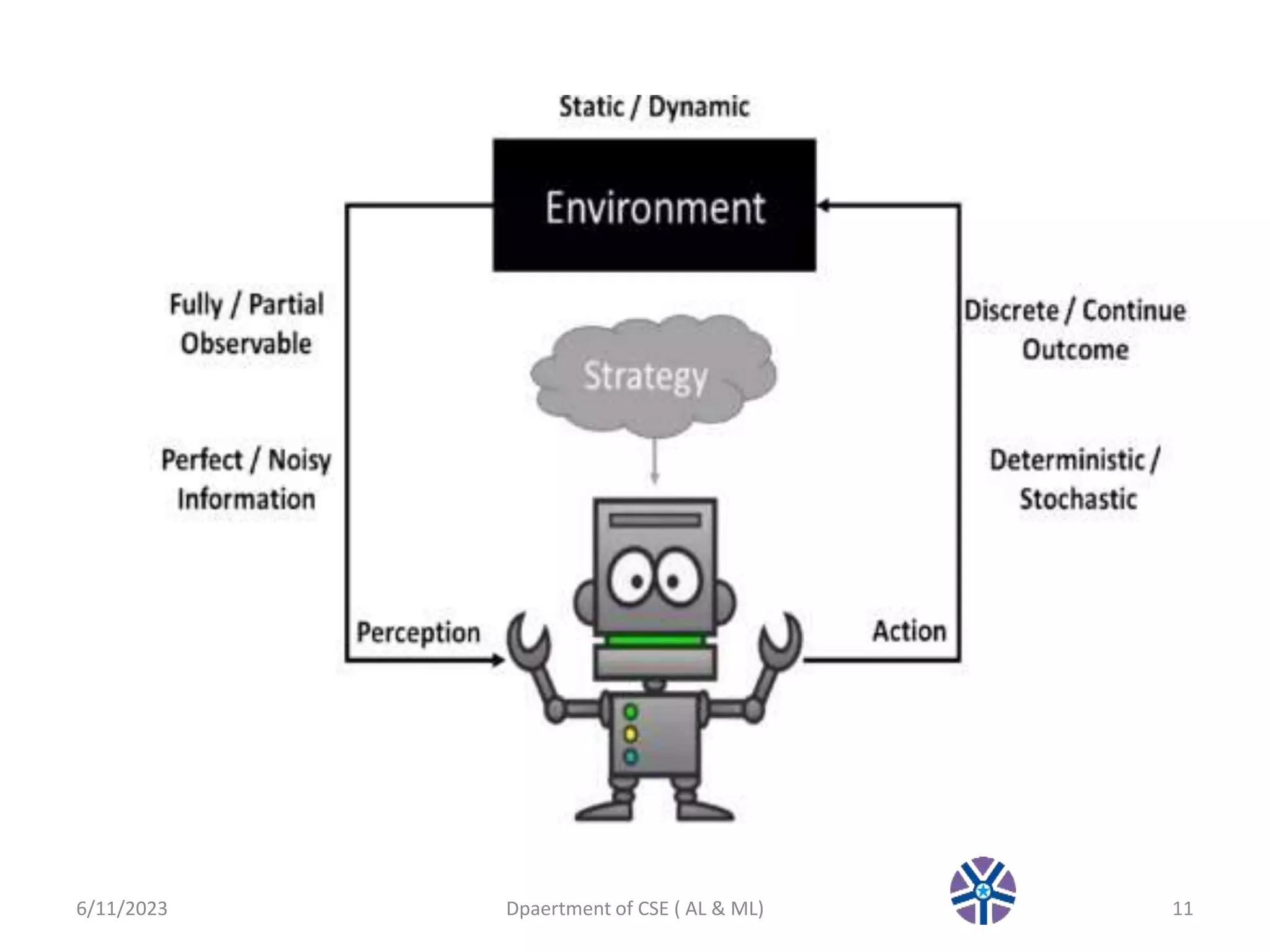



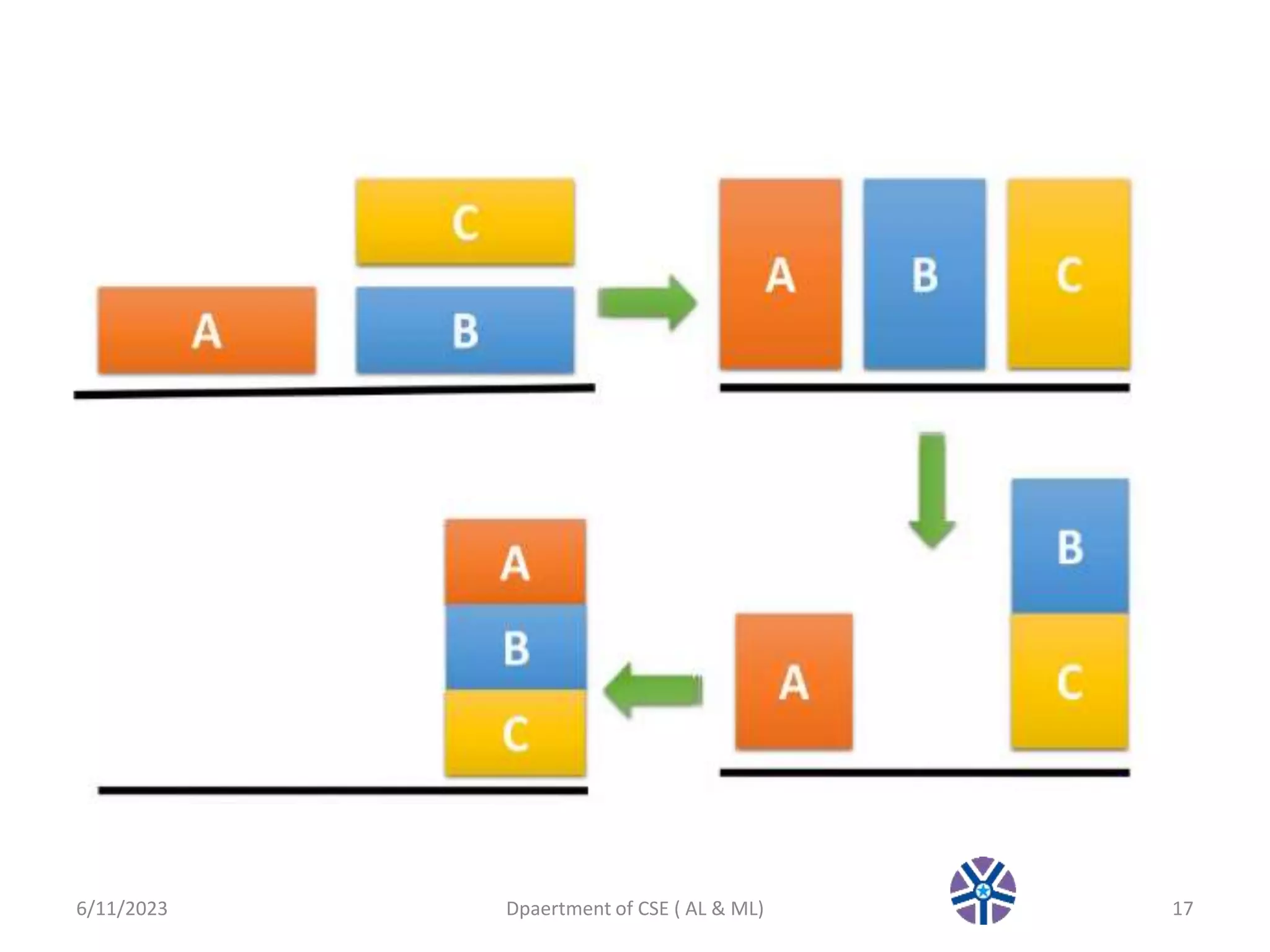
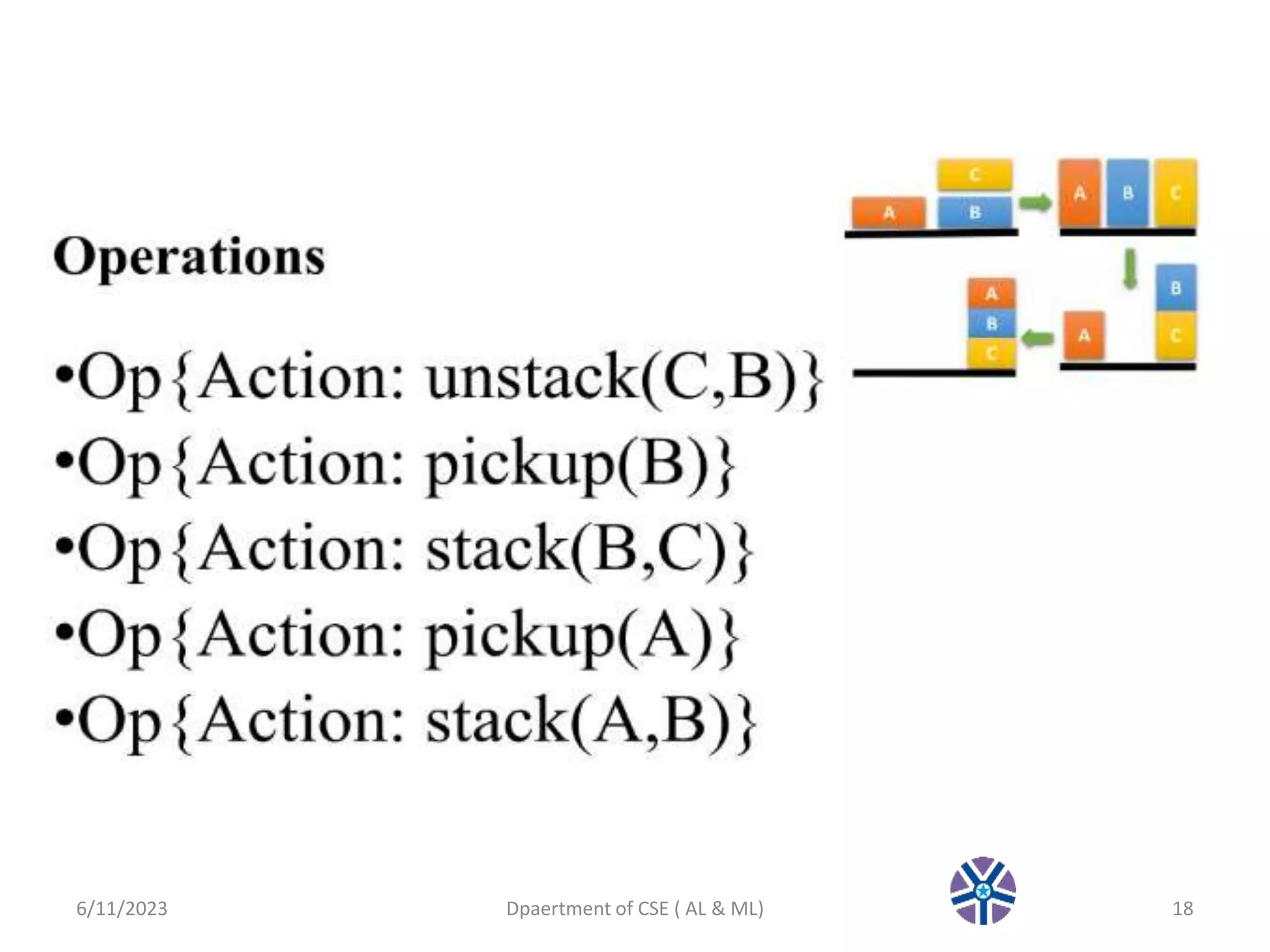


The document discusses classical planning approaches in artificial intelligence. It covers topics like planning algorithms, representation of states, goals, and actions. Classical planning assumes fully observable, deterministic, static, and discrete environments. Planning involves finding a sequence of actions to achieve a goal state from the initial state. Different planning approaches like state space search, planning graphs, and logical planning were discussed. Examples like the vacuum cleaner agent and box world domain were provided to illustrate classical planning concepts and representations.