Download as PDF, PPTX

![SHIWANI GUPTA 12
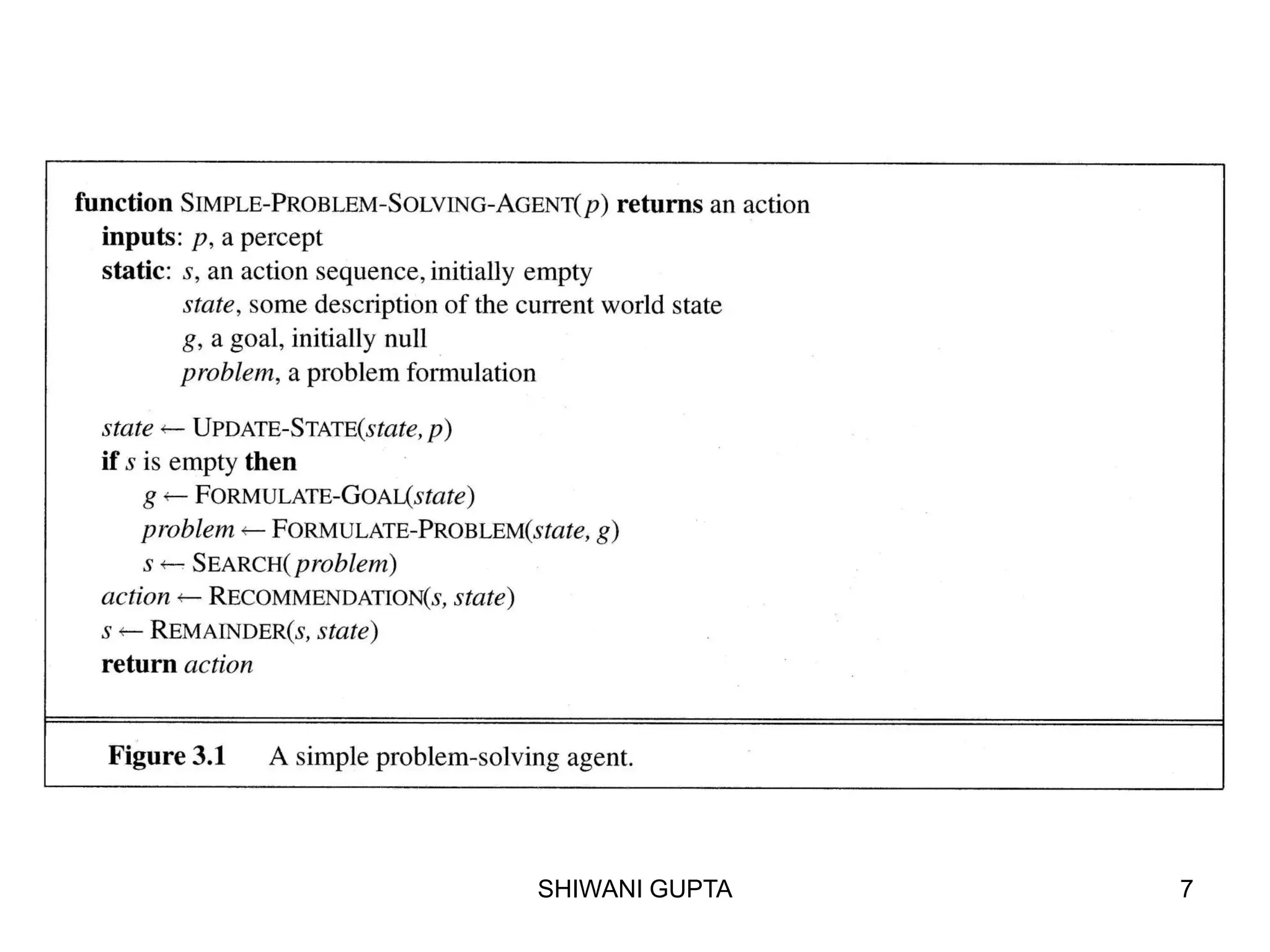
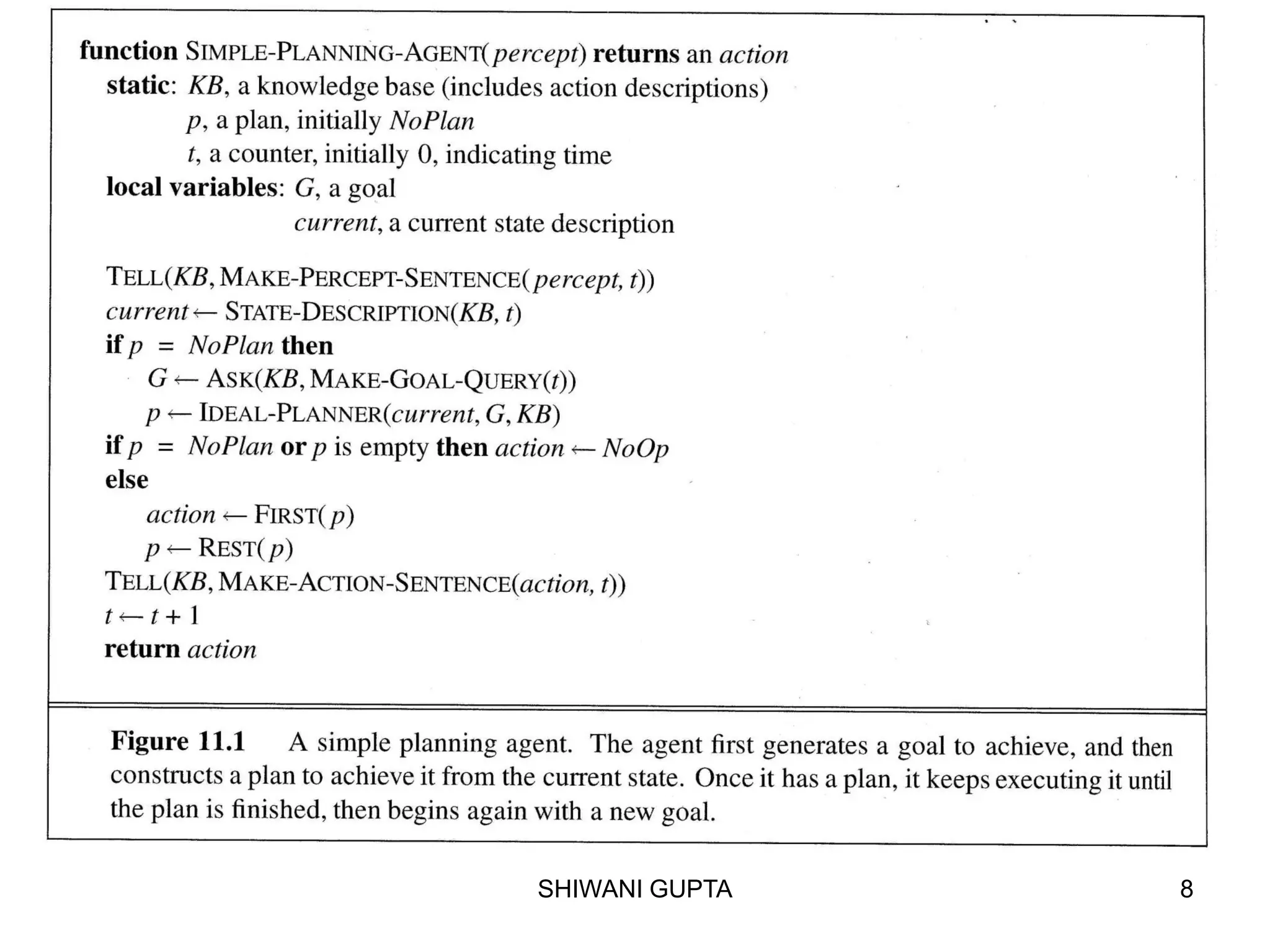
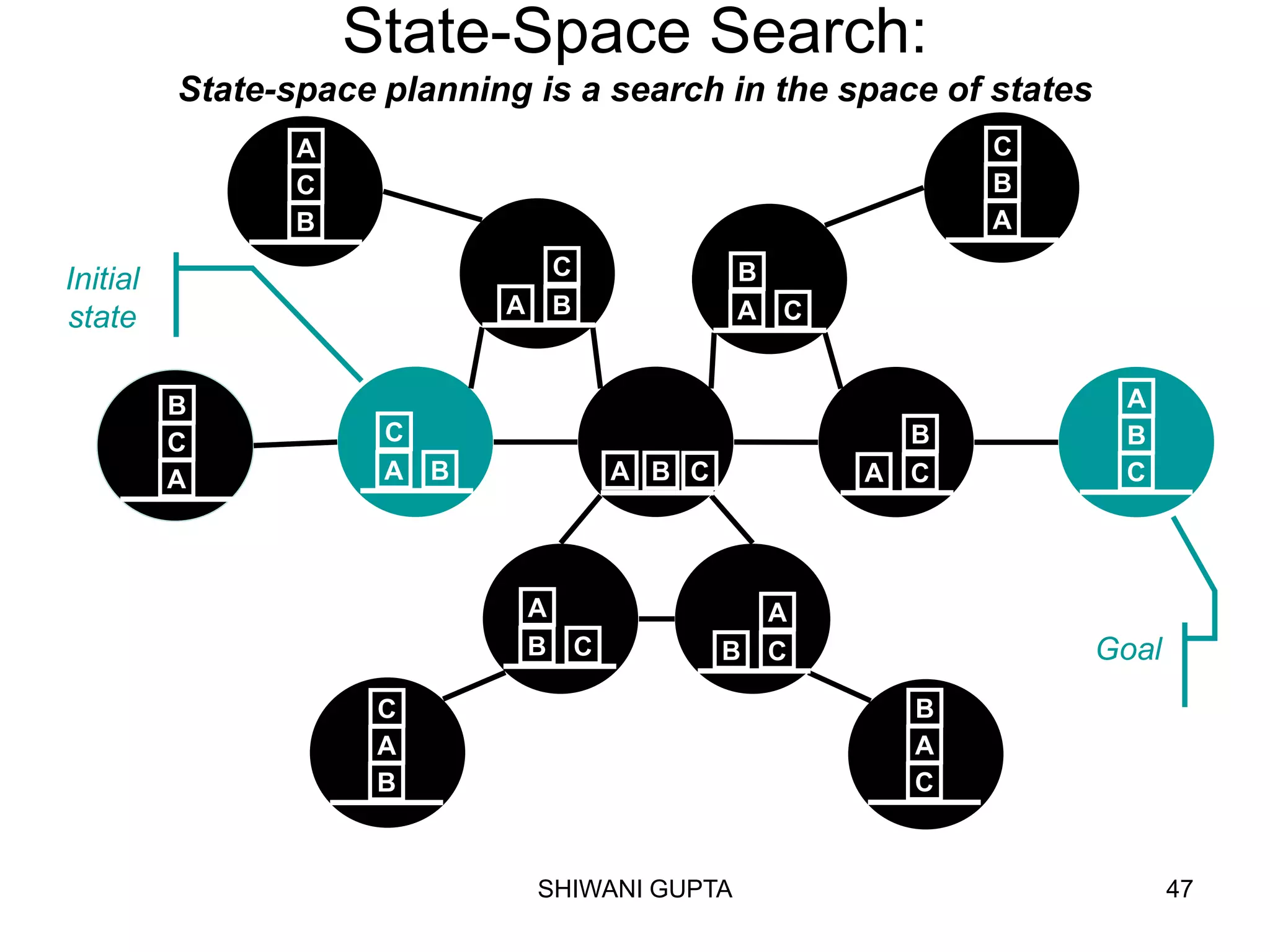
Planning in Situation Calculus
A planning problem represented in situation calculus by logical
sentences
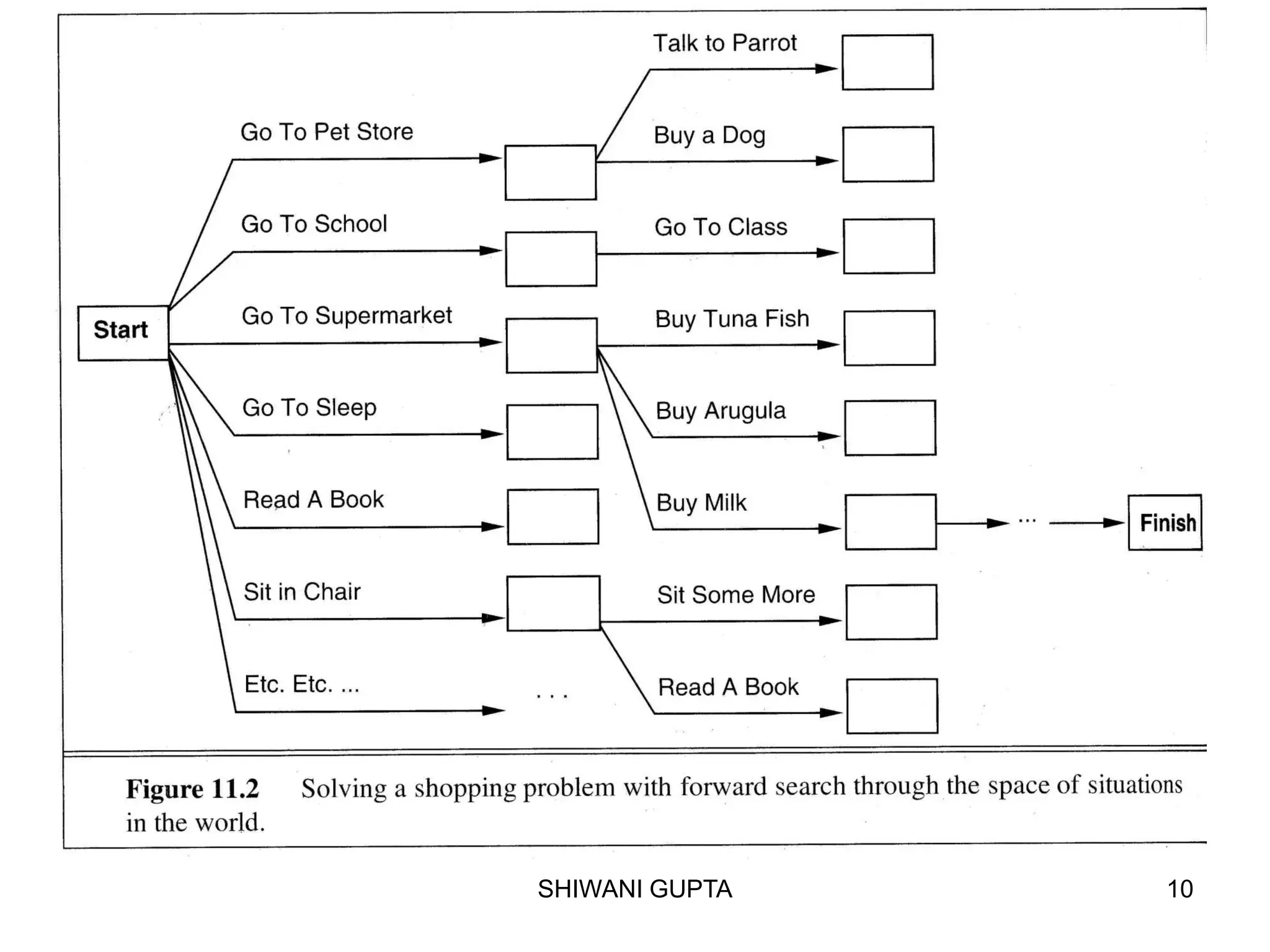
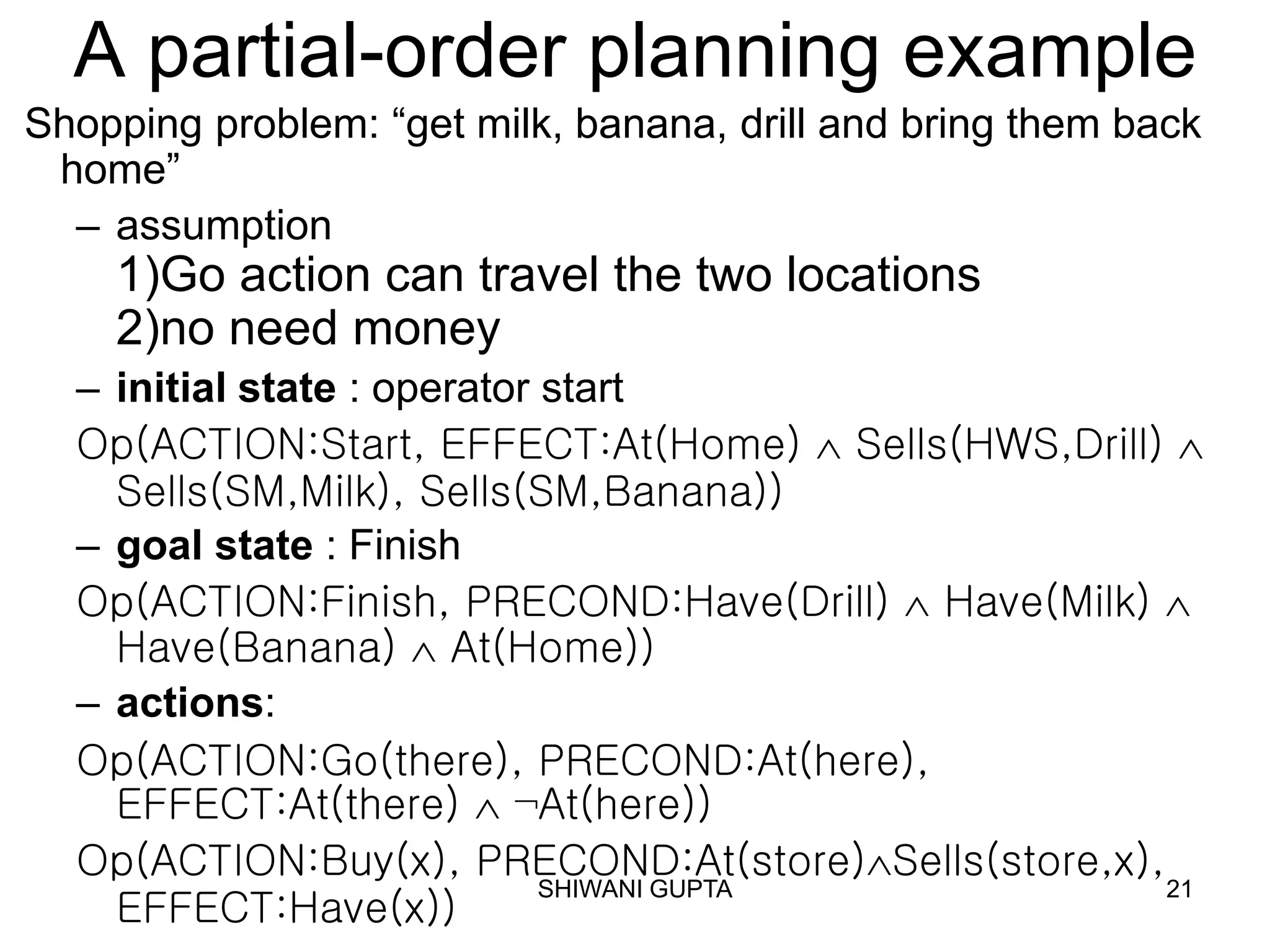
– initial state: For shopping problem
At(Home,s0) ¬Have(Milk, s0) ¬Have(Banana, s0)
¬Have(Drill,s)
– goal state: a logical query
s At(Home,s) Have(Milk,s) Have(Bananas,s)
Have(Drill,s)
– operators: description of actions
a,s Have(Milk,Result(a,s)) [(a=Buy(Milk)
At(Supermarket,s) (Have(Milk,s) a Drop(Milk))]
Result’(l,s) means result from sequence of actions starting in
s.
s Result’([],s)=s](https://image.slidesharecdn.com/planningandlearning-200319110937/75/Planning-Agent-12-2048.jpg)
![SHIWANI GUPTA 13
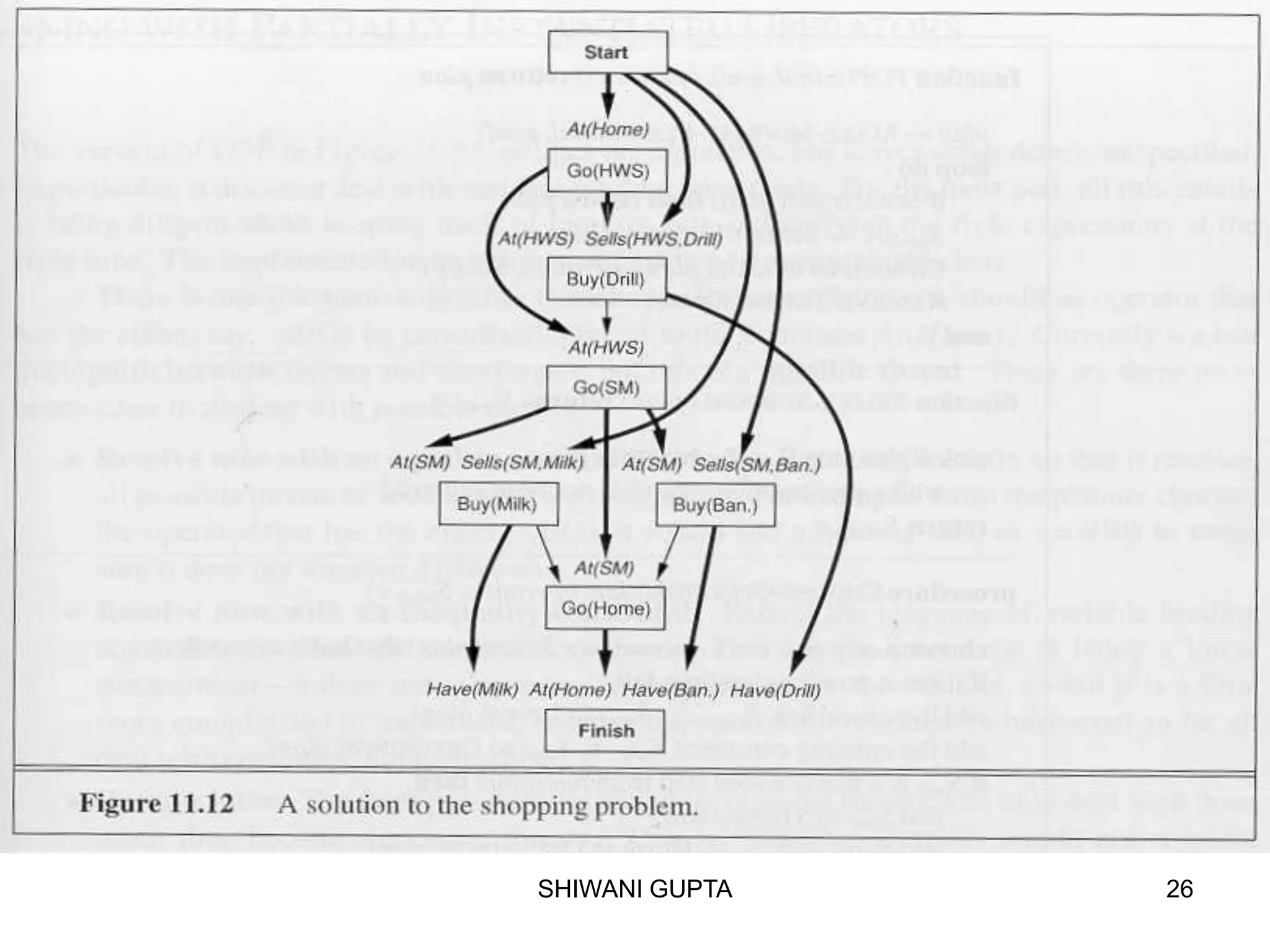
• A solution to the shopping problem is a plan P
So, yields a situation satisfying the goal query :
At(Home, Result’(P,s0)) Have(Milk,Result’(P, s0))
Have(Bananas, Result’(P, s0) Have(Drill,Result’ (P, s0))
P=[Go(Supermarket), Buy(Bananas), Go(HardwareStore), Buy(Drill),
Go(Home)]
• To make planning practical
(1) Restrict the language
(2) use a special-purpose algorithm](https://image.slidesharecdn.com/planningandlearning-200319110937/75/Planning-Agent-13-2048.jpg)


















![SHIWANI GUPTA 49
Hierarchical Decomposition
• Solution at a high level abstraction
[Go(Supermarket),Buy(Milk),Buy(Bananas),Go(Home)]
It is a long way from instruction fed to the agent’s effectors
• A low level plan
[Forward(1 cm),Turn(1 deg),Forward(1 cm), ……]
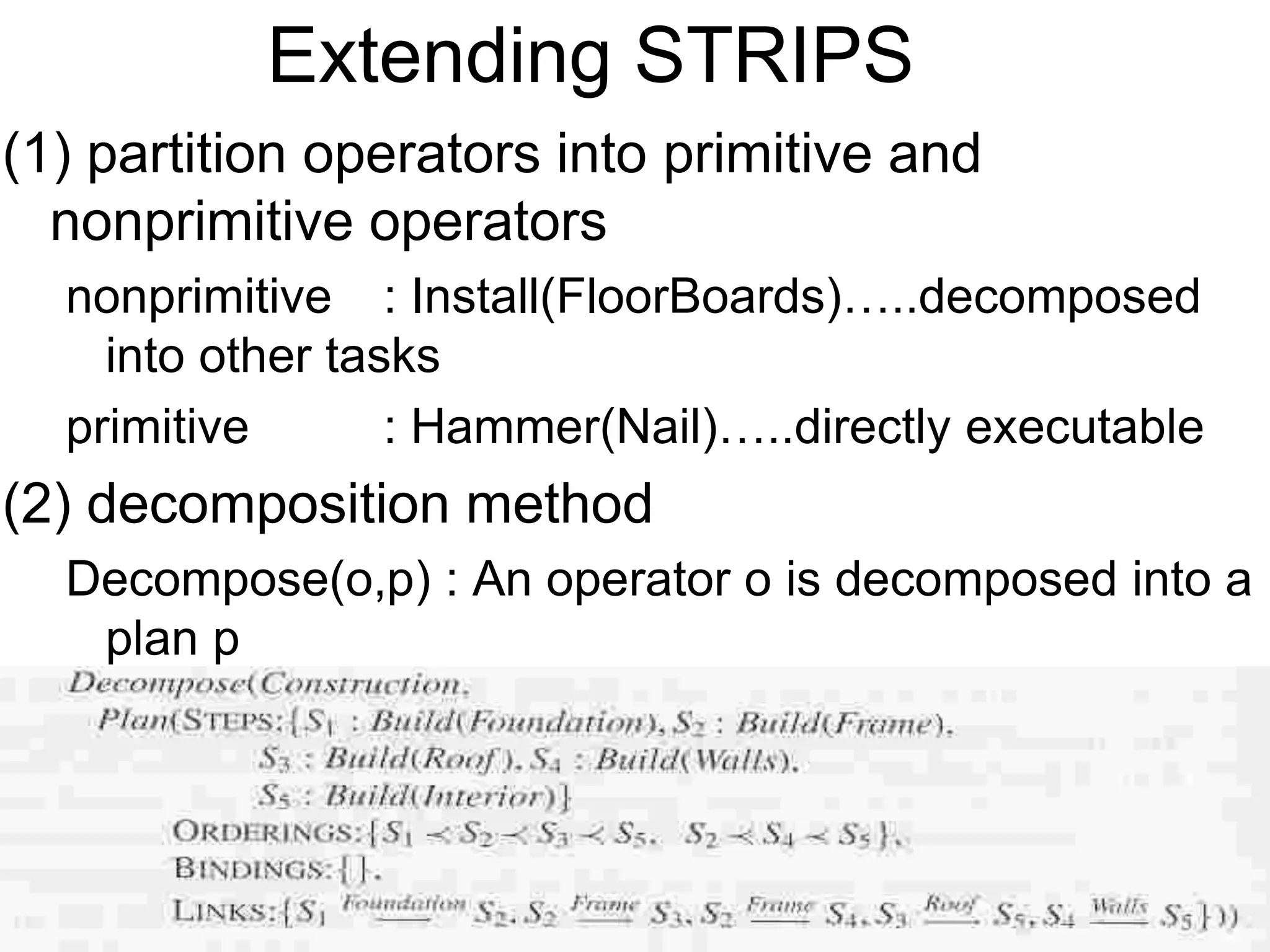
• Hierarchical decomposition : an abstract operator can
be decomposed into a group of steps
eg. Abstract operator: Build(House)
decomposed operators : obtain Permit,Hire
Builder,Construction, Pay Builder
• Primitive operator:executed by the agent](https://image.slidesharecdn.com/planningandlearning-200319110937/75/Planning-Agent-49-2048.jpg)



![SHIWANI GUPTA 57
eg. “Fixing a flat tire”
(1) Possible operators
• Op(ACTION:Remove(x),
PRECOND:On(x),
EFFECT:Off(x) ClearHub(x) On(x))
• Op(ACTION:PutOn(x),
PRECOND:Off(x) ClearHub(x),
EFFECT:On(x) ClearHub(x) Off(x))
• Op(ACTION:Inflate(x),
PRECOND:Intact(x) Flat(x),
EFFECT:Inflated(x) Flat(x))
(2) goal
• On(x) Inflated(x)
(3) Initial conditions
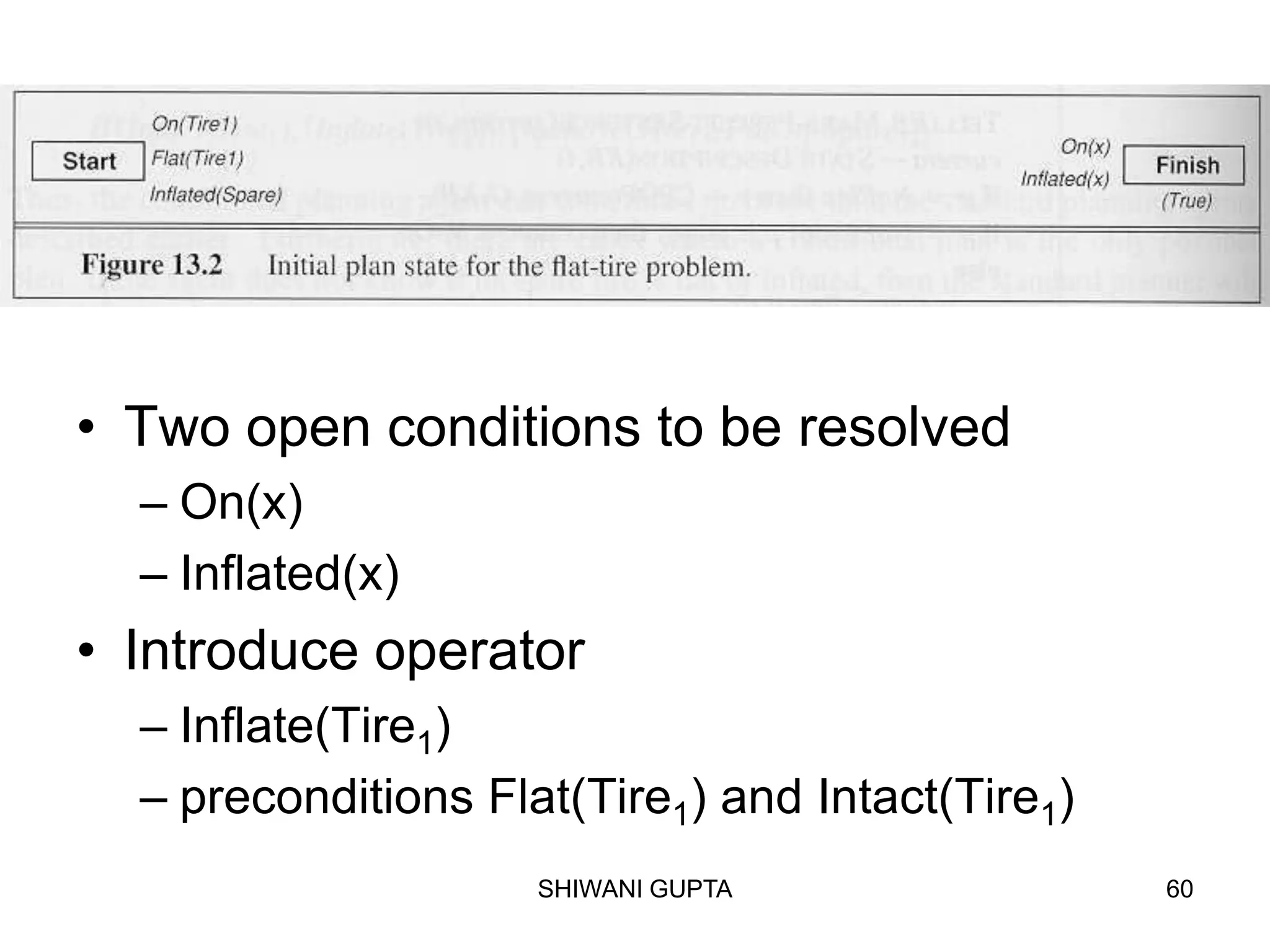
• Inflated(Spare)Intact(Spare)Off(Spare)On(Tire1)Flat(Tire1)
(4) Initial plan
• [Remove(Tire1), PutOn(Spare)]](https://image.slidesharecdn.com/planningandlearning-200319110937/75/Planning-Agent-57-2048.jpg)
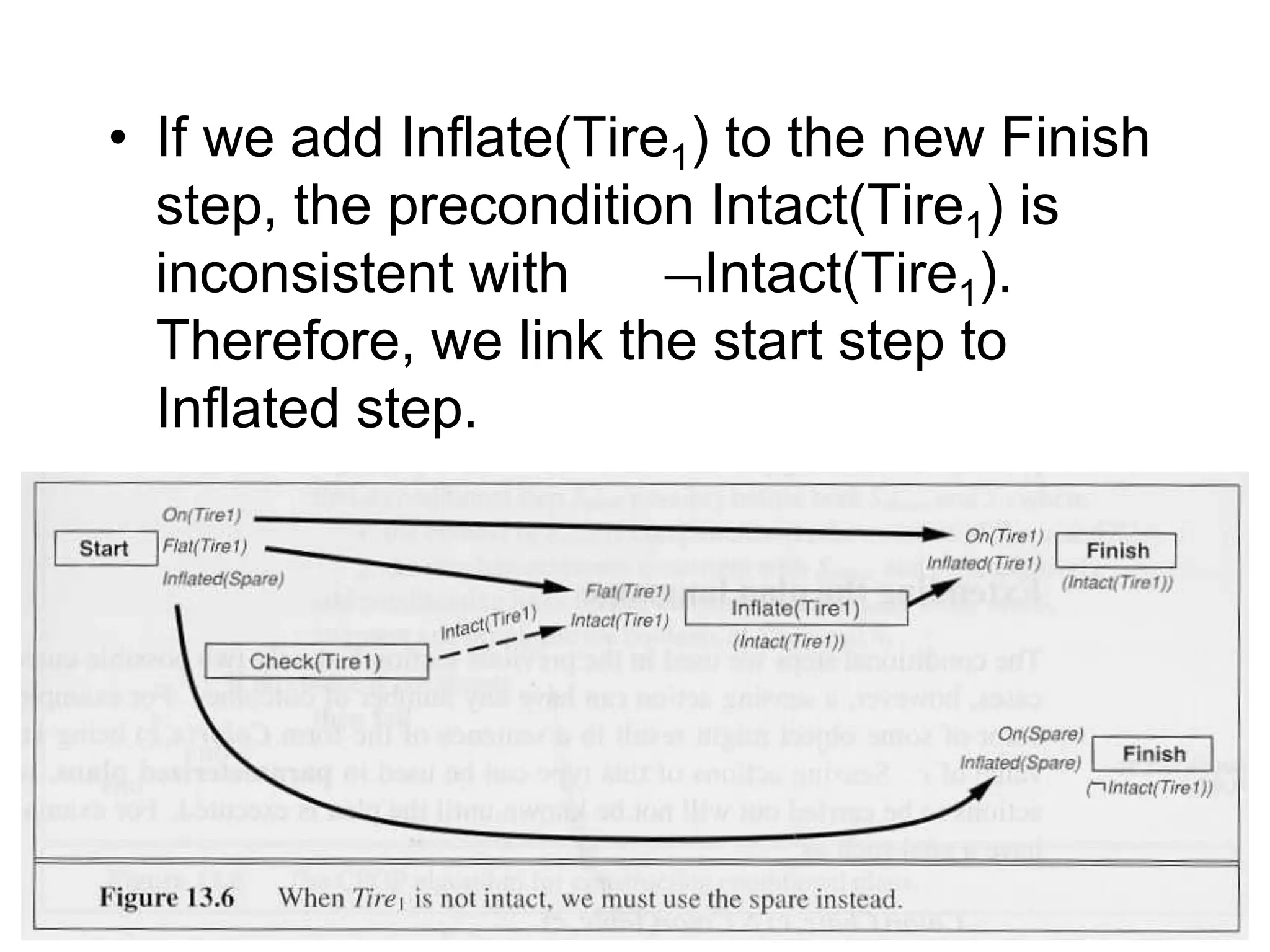
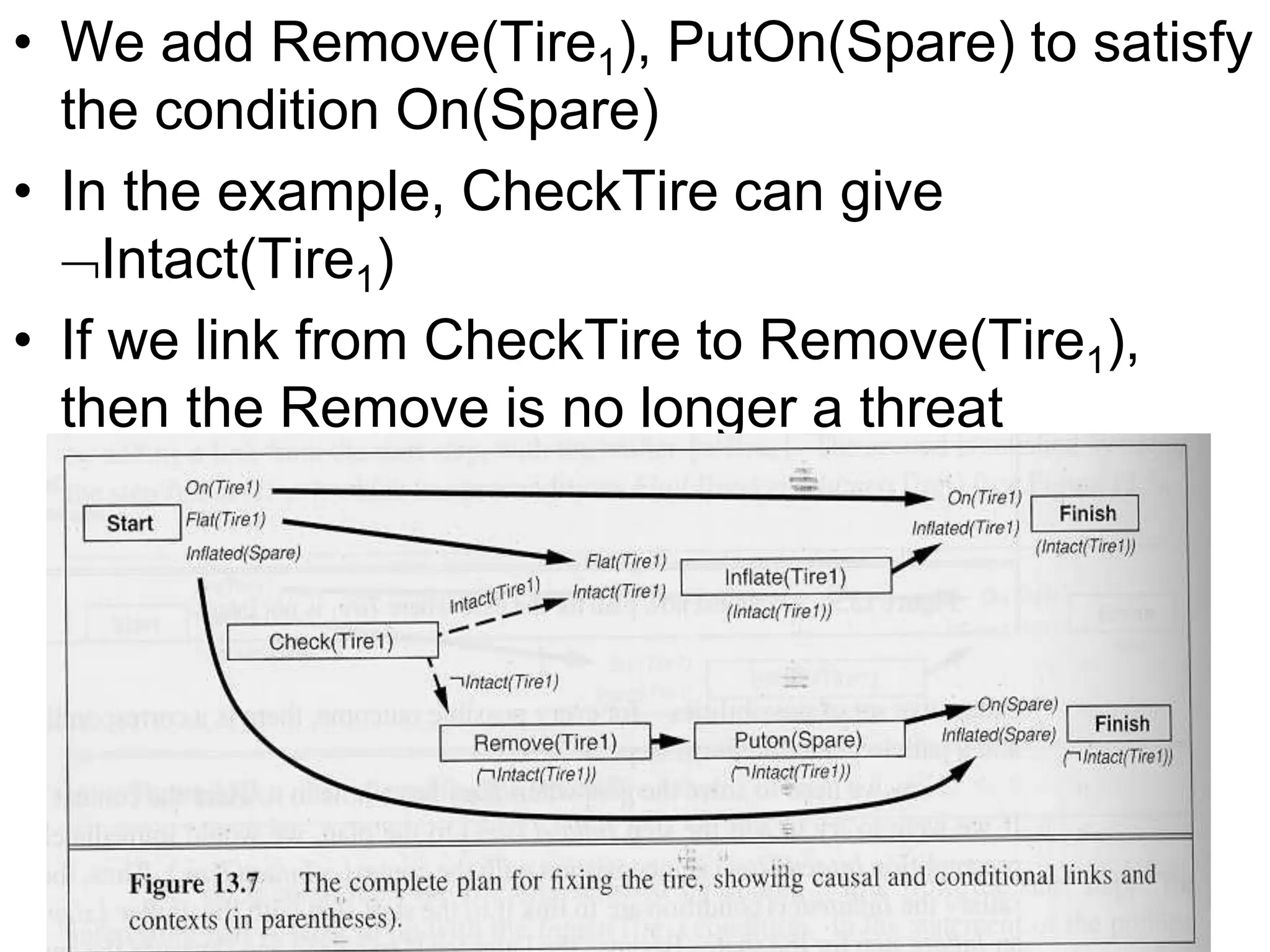
![SHIWANI GUPTA 58
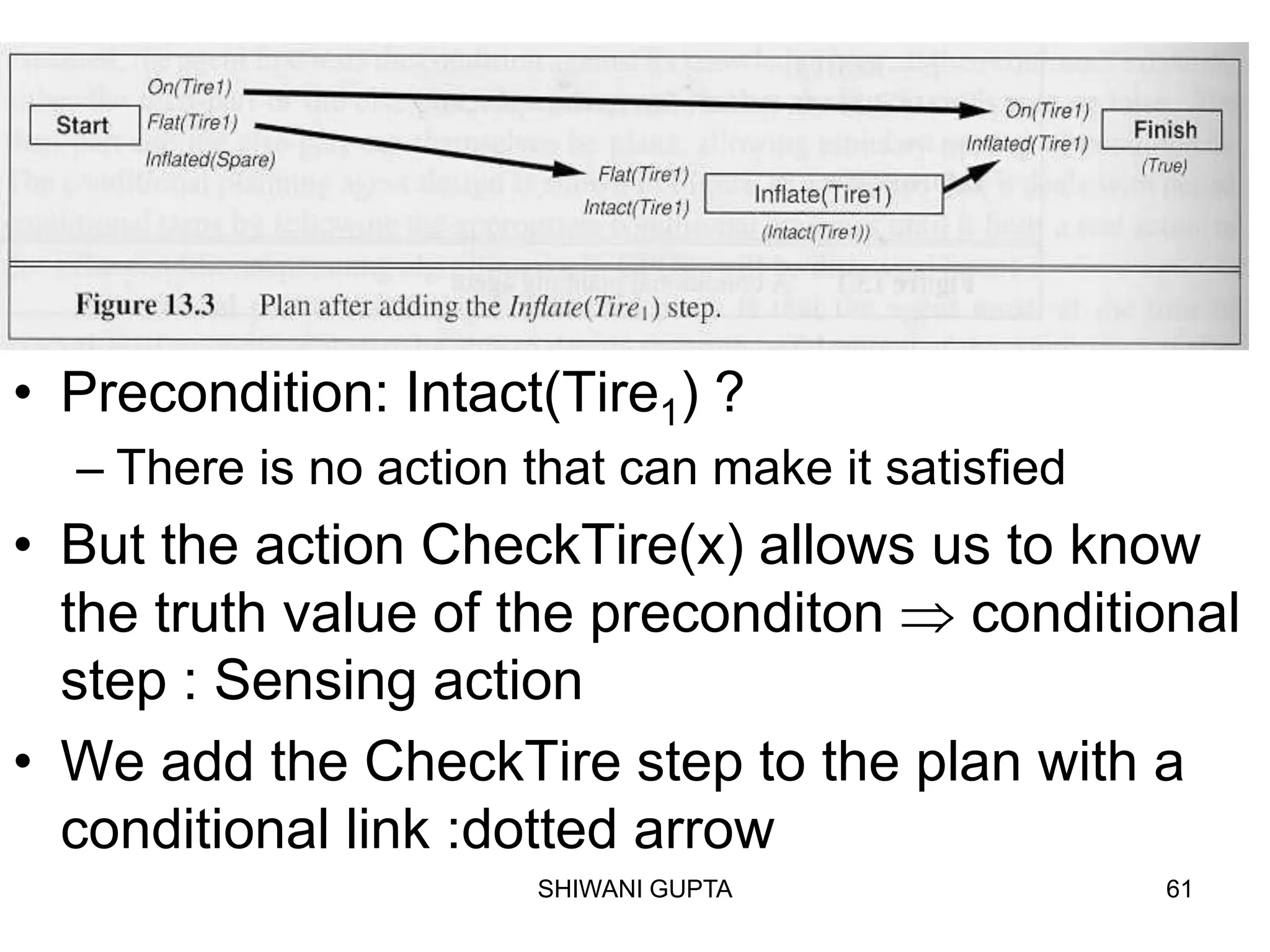
• The initial plan is good if there is no Intact(Tire1). But, if Tire1 is
intact, only the inflation is needed
• Conditional step
If(<condition>,<ThenPart>,<ElsePart>,)
• If(Intact(Tire1),[Inflate(Tire1)],[Remove(Tire1),
PutOn(Spare)])
• Sensing Action
x,s Tire(x)
KnowsWhether(“Intact(x)”,Result(CheckTire(x),s))
In our action schema format
• Op(ACTION:CheckTire(x),
PRECOND:Tire(x),
EFFECT:KnowsWhether(“Intact(x)”))](https://image.slidesharecdn.com/planningandlearning-200319110937/75/Planning-Agent-58-2048.jpg)



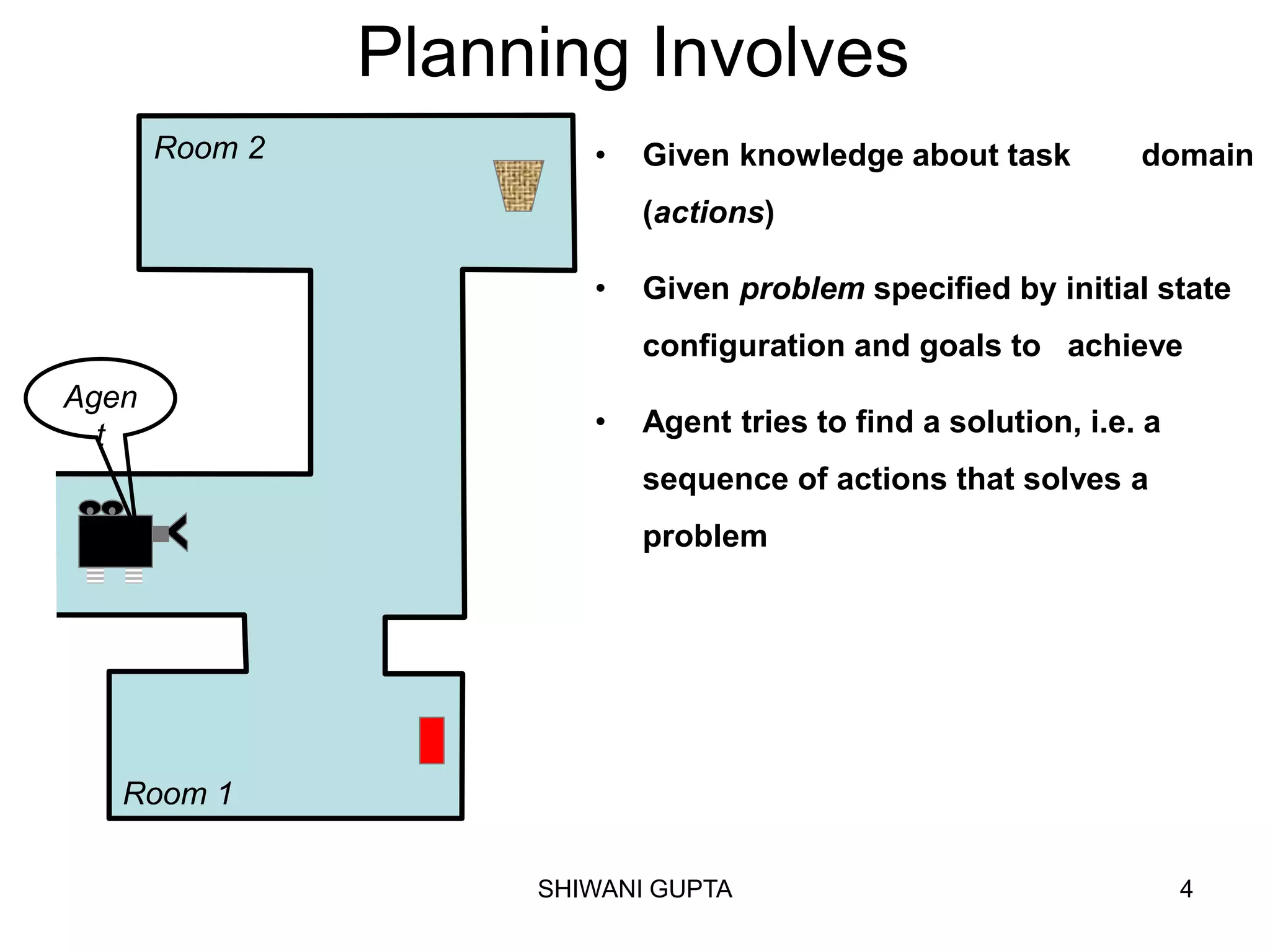
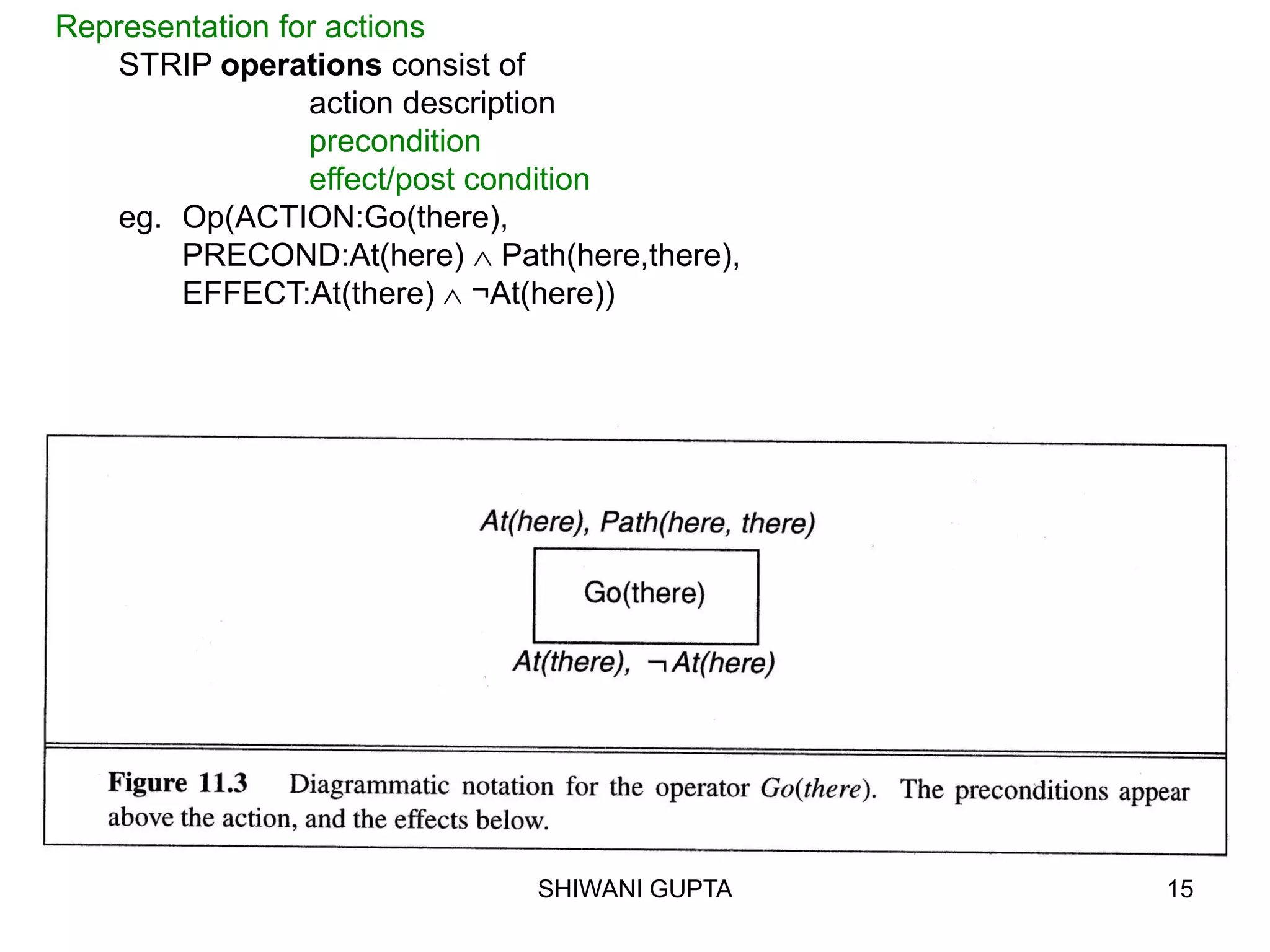
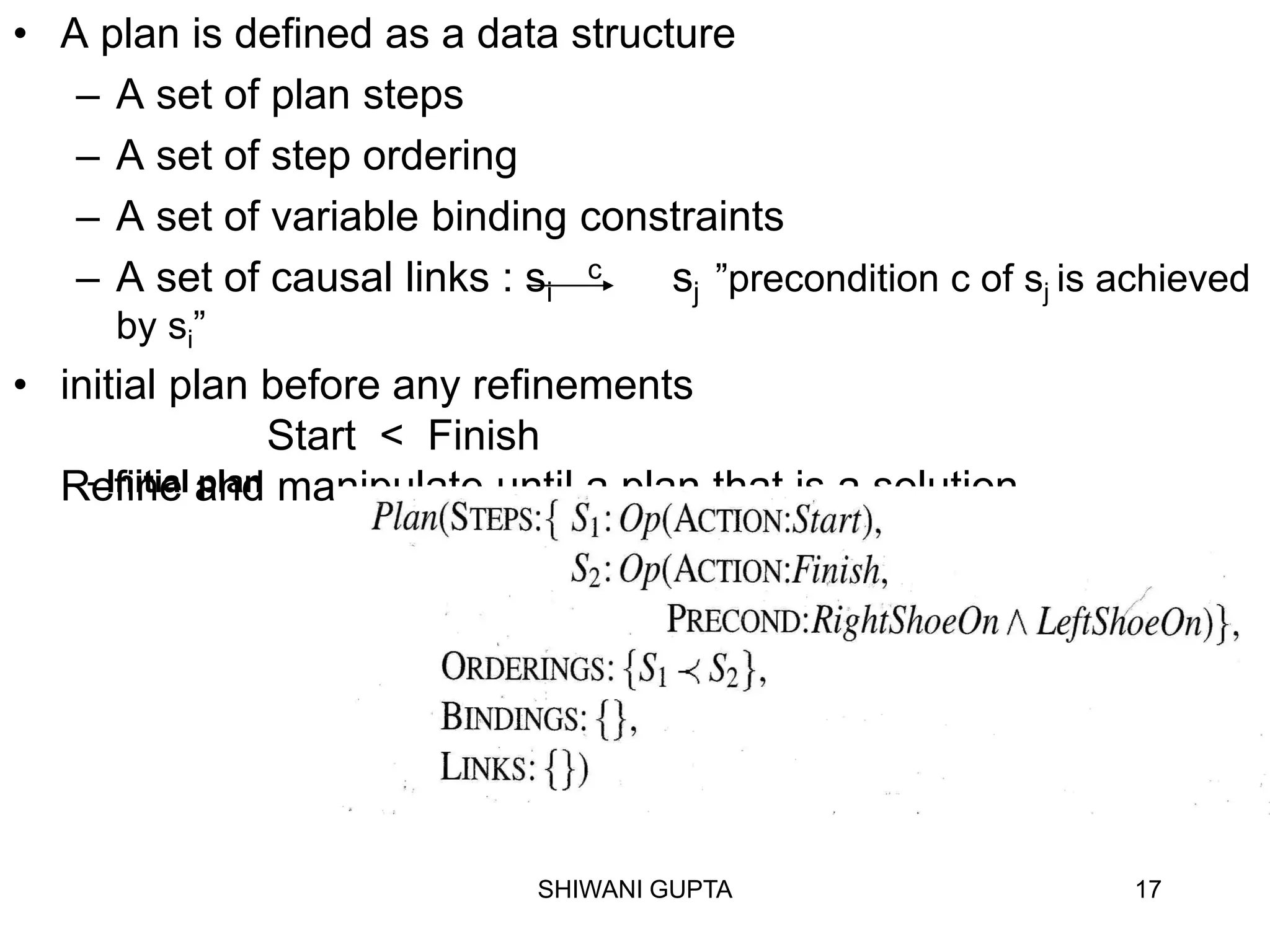
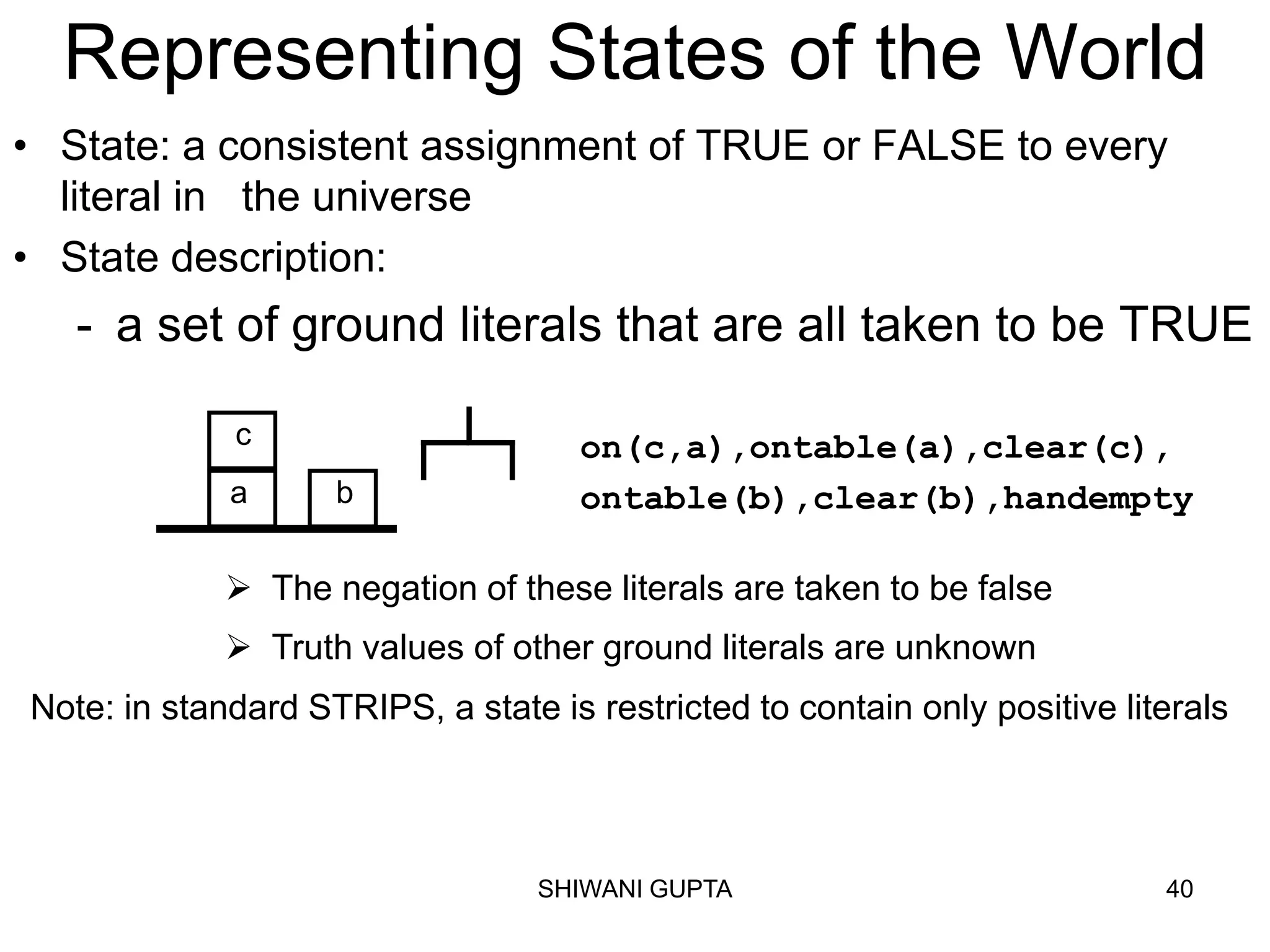
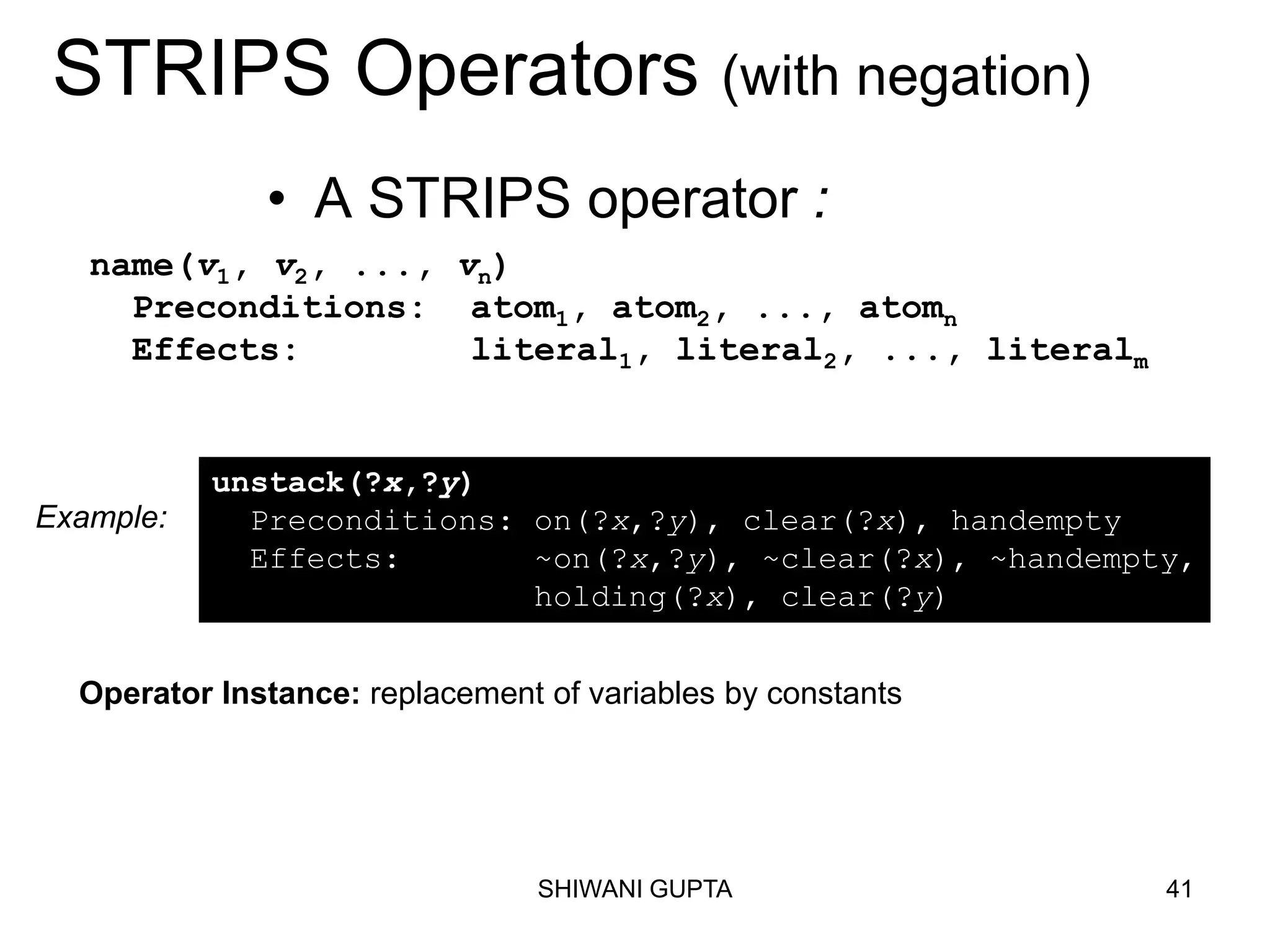
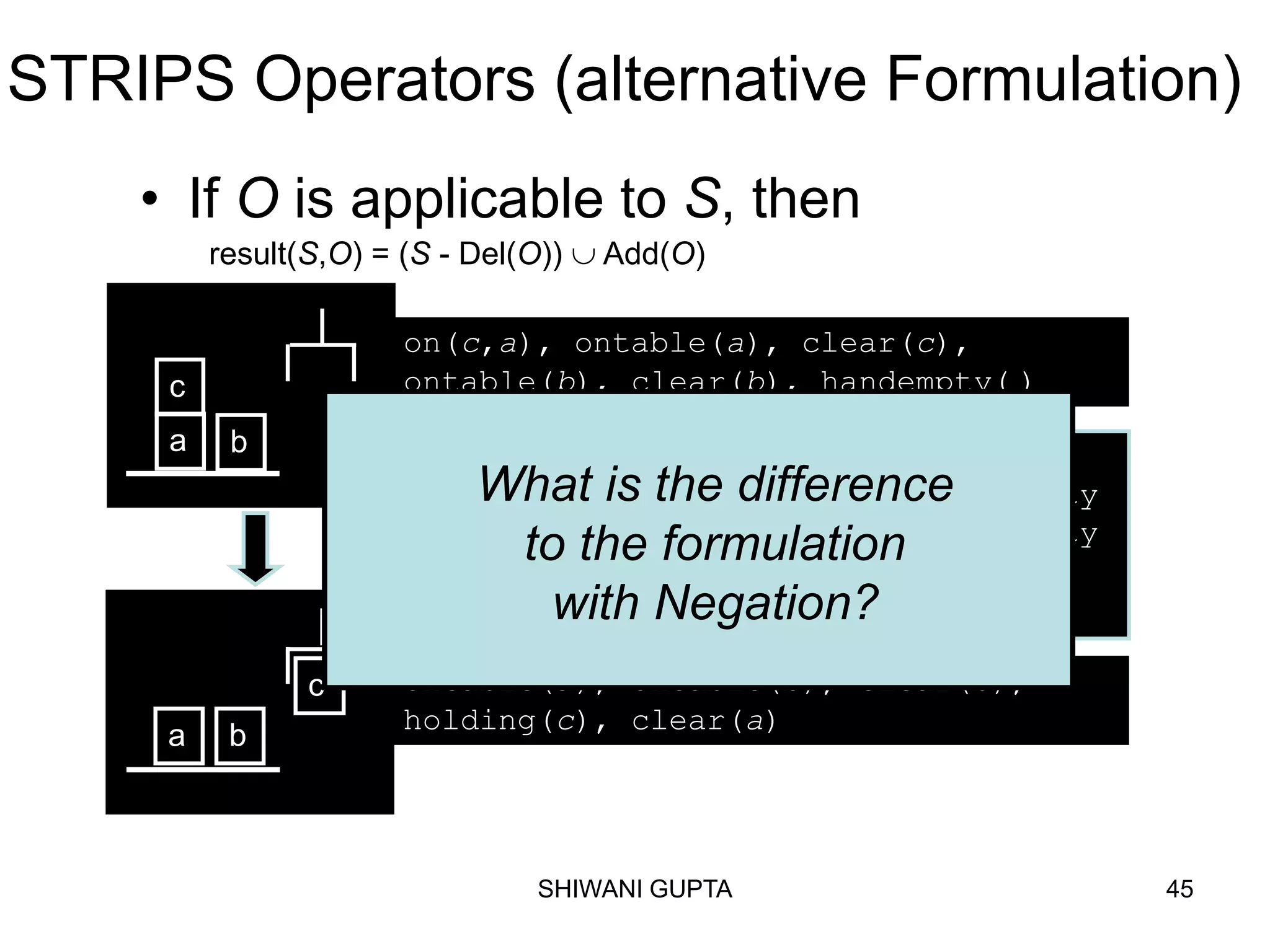
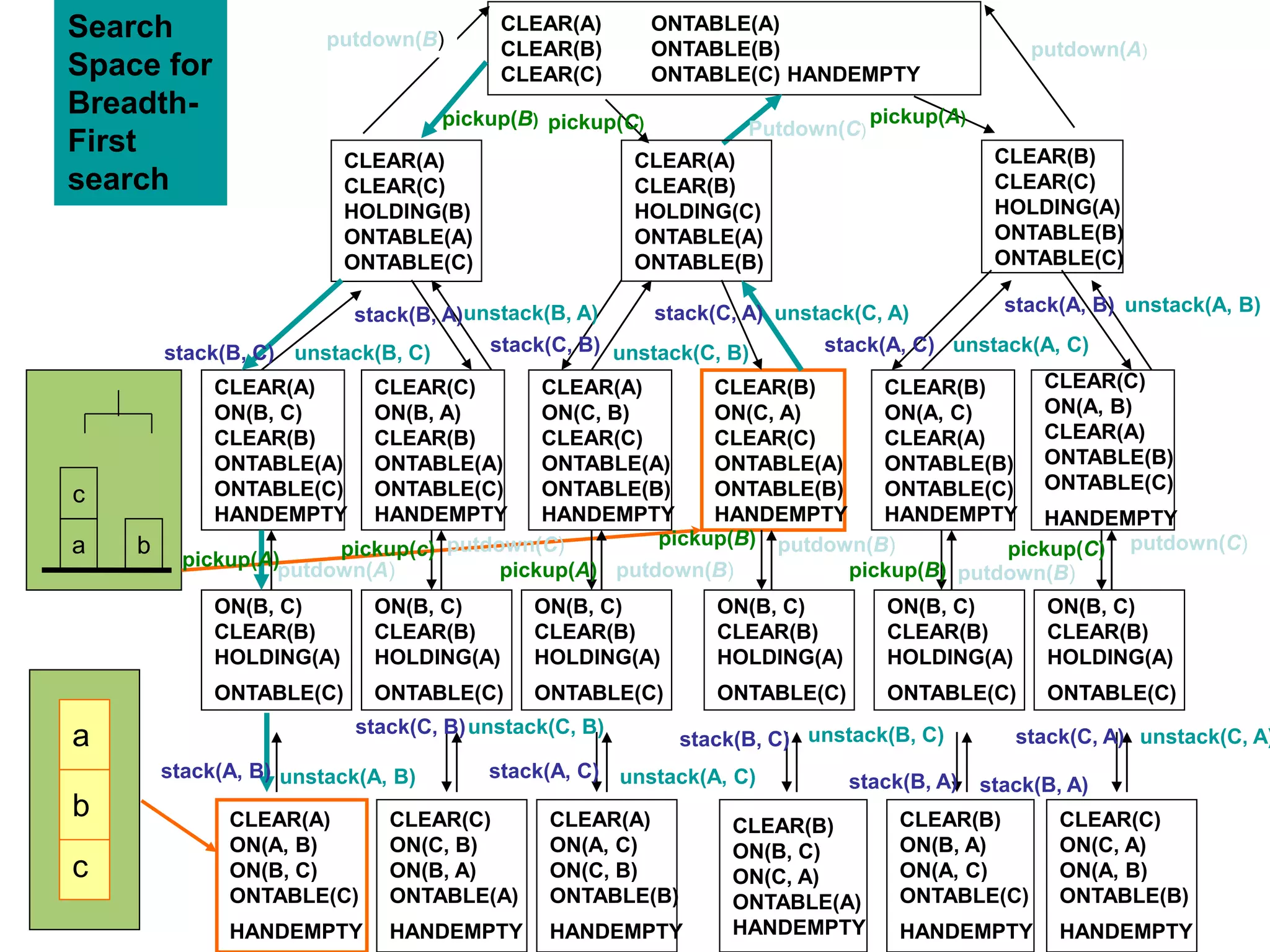
Planning involves representing an initial state, possible actions, and a goal state. A planning agent uses a knowledge base to select action sequences that transform the initial state into a goal state. STRIPS is a common planning representation that uses predicates to describe states and logical operators to represent actions and their effects. A STRIPS planning problem specifies the initial state, goal conditions, and set of operators. A solution is a sequence of ground operator instances that produces the goal state from the initial state.