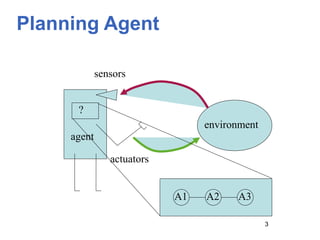
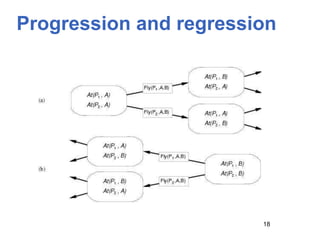
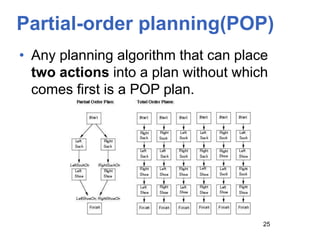
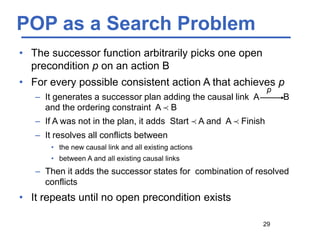
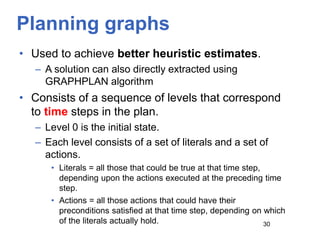
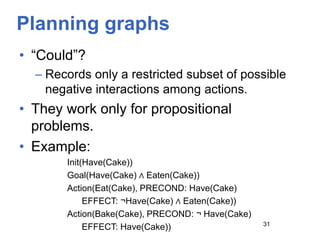
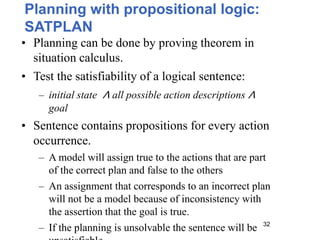
Planning involves finding a sequence of actions that achieves a goal state from an initial state. It can be formulated as a state-space search problem. Progression planners search forward from the initial state, while regression planners search backward from the goal state. Partial-order planning delays commitments to action ordering, allowing more flexible plans. Planning graphs compactly represent interactions between actions and can provide better heuristics for search.






































![Polymer [ बहुलक ] Chemistry Notes PDF - Irfanullah Mehar - JJ Sir Chemistry.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/polymerchemistrynotespdf-irfanullahmehar-jjsirchemistry-260210172118-3f9b37f7-thumbnail.jpg?width=640&height=640&fit=bounds)








