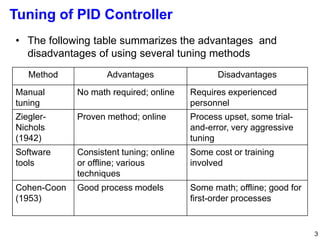
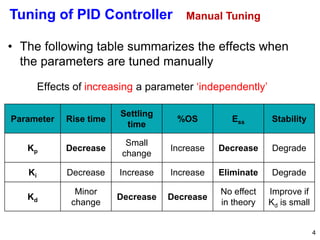
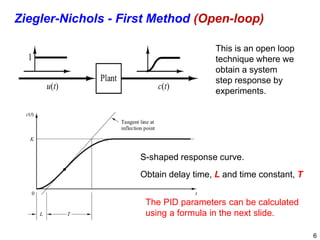
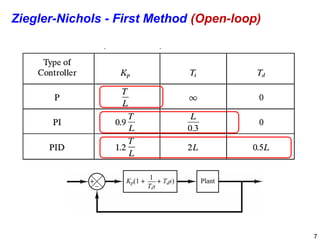
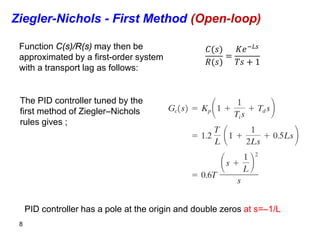
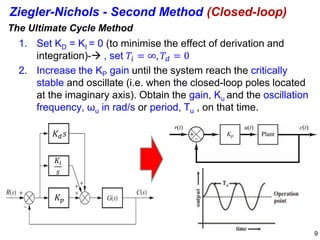
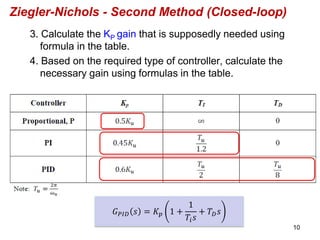
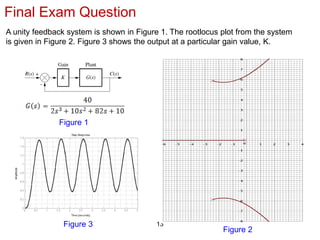
The document discusses PID (Proportional-Integral-Derivative) controller tuning methods, highlighting the use of root locus and various tuning techniques categorized into open-loop and closed-loop approaches. It outlines specific methods like Ziegler-Nichols and Cohen-Coon, detailing their advantages and disadvantages, as well as the effects on system parameters during manual tuning. Additionally, it emphasizes the necessity of fine-tuning following initial setups to achieve acceptable performance in control systems.