Contents
• Introduction toprocess control
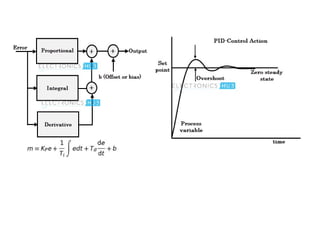
• PID controller and tuning
• Various control configurations such as cascade
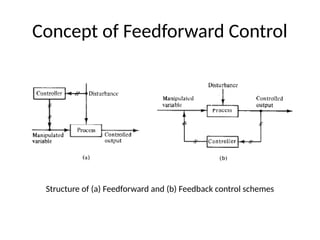
control, feedforward control, split range
control, ratio control, override control,
selective control
3.
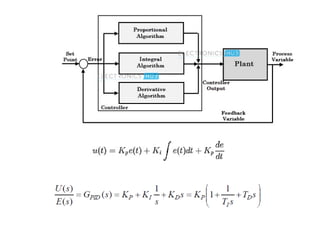
What is FeedbackControl System?
• The process: It is the system to be controlled
• The process variable: It is the quantity to be measured and
controlled
• Sensor or transmitter: It is a device that measures process
variable
• The Controller: It decides the control variable in order to
bring the process variable as close as to the set point.
• Final Control Element: It is a device that directly
manipulates the manipulating variable to control over the
process.
• Manipulating Variable: It is the quantity which can be
directly altered to control over the process variable.
Introduction to PIDControllers
• PID controllers are most widely used automatic industrial controllers. In
process industries, most of the control loops (typically 90-95 percent) are of
PID type.
• These controllers receive inputs from sensors, meters, etc. and depending
on PID control function they deliver output control signals to the controlled
or manipulating devices such as relays, actuators, etc.
• These are the most common form of feedback systems and become a
standard tool for precise control applications.
PID Tuning Method
•The determination of corresponding PID parameter
values for getting the optimum performance from
the process is called tuning. This is obviously a crucial
part in case of all closed loop control systems.
17.
General Tips forDesigning a PID Controller
• Obtain an open-loop response and determine what needs
to be improved.
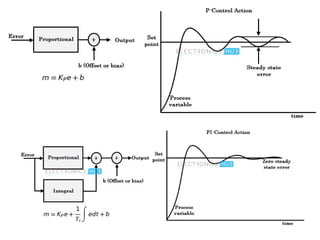
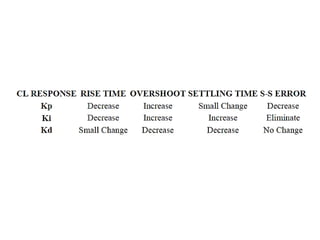
• Add a proportional control to improve the rise time.
• Add a derivative control to improve the overshoot.
• Add an integral control to eliminate the steady-state error.
• Adjust each of Kp, Ki, and Kd until you obtain a desired
overall response.
18.
Trial and ErrorMethod
• Set integral and derivative terms to zero first and then increase the
proportional gain until the output of the control loop oscillates at a
constant rate. This increase of proportional gain should be such that
response the system becomes faster but should not become
unstable.
• Once the P-response is fast enough, set the integral term, so that
the oscillations will be gradually reduced. Change this I-value until
the steady state error is reduced, but it may increase overshoot.
19.
Trial and ErrorMethod
• Once P and I parameters have been set to a desired
values with minimal steady state error, increase the
derivative gain until the system reacts quickly to its set
point. Increasing derivative term decreases the
overshoot of the controller response.
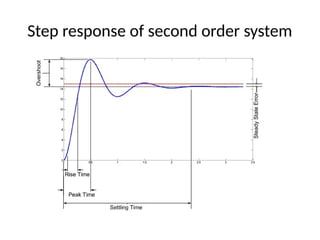
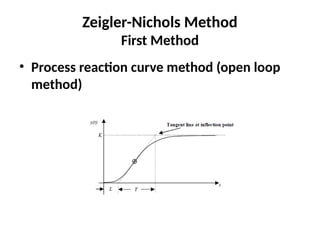
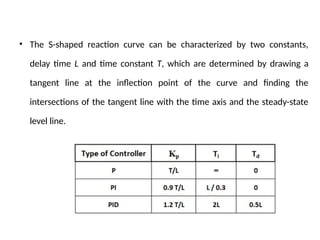
• The S-shapedreaction curve can be characterized by two constants,
delay time L and time constant T, which are determined by drawing a
tangent line at the inflection point of the curve and finding the
intersections of the tangent line with the time axis and the steady-state
level line.
22.
Process reaction curvemethod
Advantages
• Quick and easier to use than other methods
• It is a robust and popular method
• Of these two techniques, the Process Reaction Method is the easiest and least
disruptive to implement
Disadvantages
• It depends upon purely proportional measurement to estimate I and D controllers.
• Approximations for the Kc, Ti, and Td values might not be entirely accurate for
different systems.
• It does not hold for I, D and PD controllers.
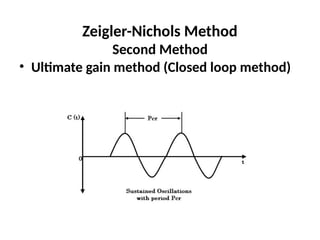
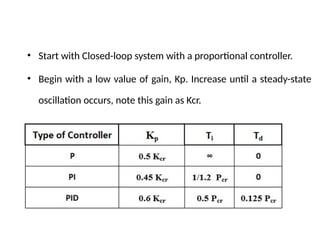
• Start withClosed-loop system with a proportional controller.
• Begin with a low value of gain, Kp. Increase until a steady-state
oscillation occurs, note this gain as Kcr.
25.
Ultimate gain method
Advantages
•Used for systems with time delay.
• Quicker closed loop response time.
Disadvantages and Limitations
• Unstable closed loop systems.
• Can only be used for first order models including large process delays.
• Offline method.
• Approximations for the Kc, τi, and τd values might not be entirely accurate for
different systems.
26.
• Ziegler-Nichols tuningmethod to determine an
initial/estimated set of working PID parameters for
an unknown system
• Usually included with industrial process controllers
and motor controllers as part of the set-up utilities
• Some controllers have additional autotune routines