Download to read offline
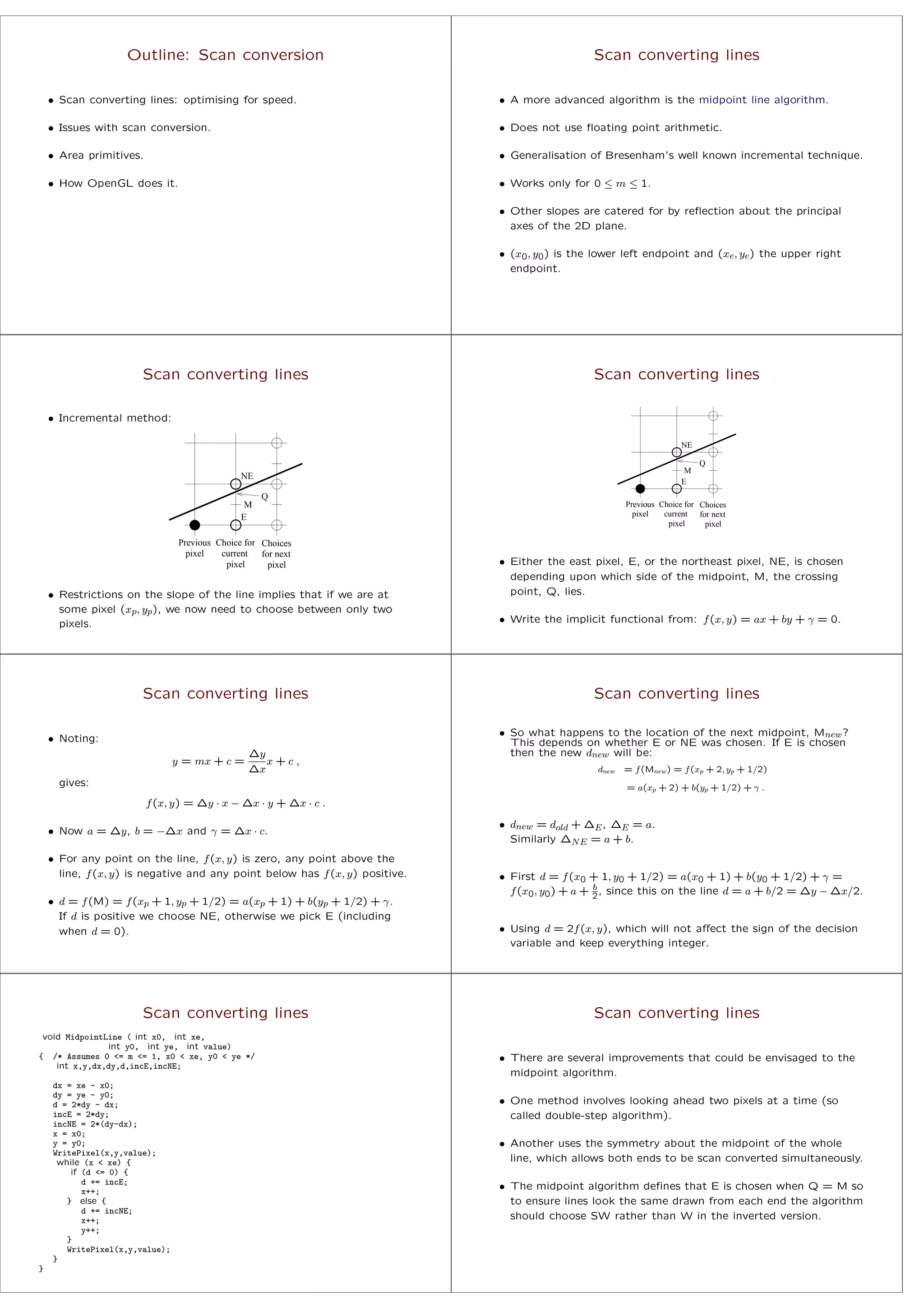

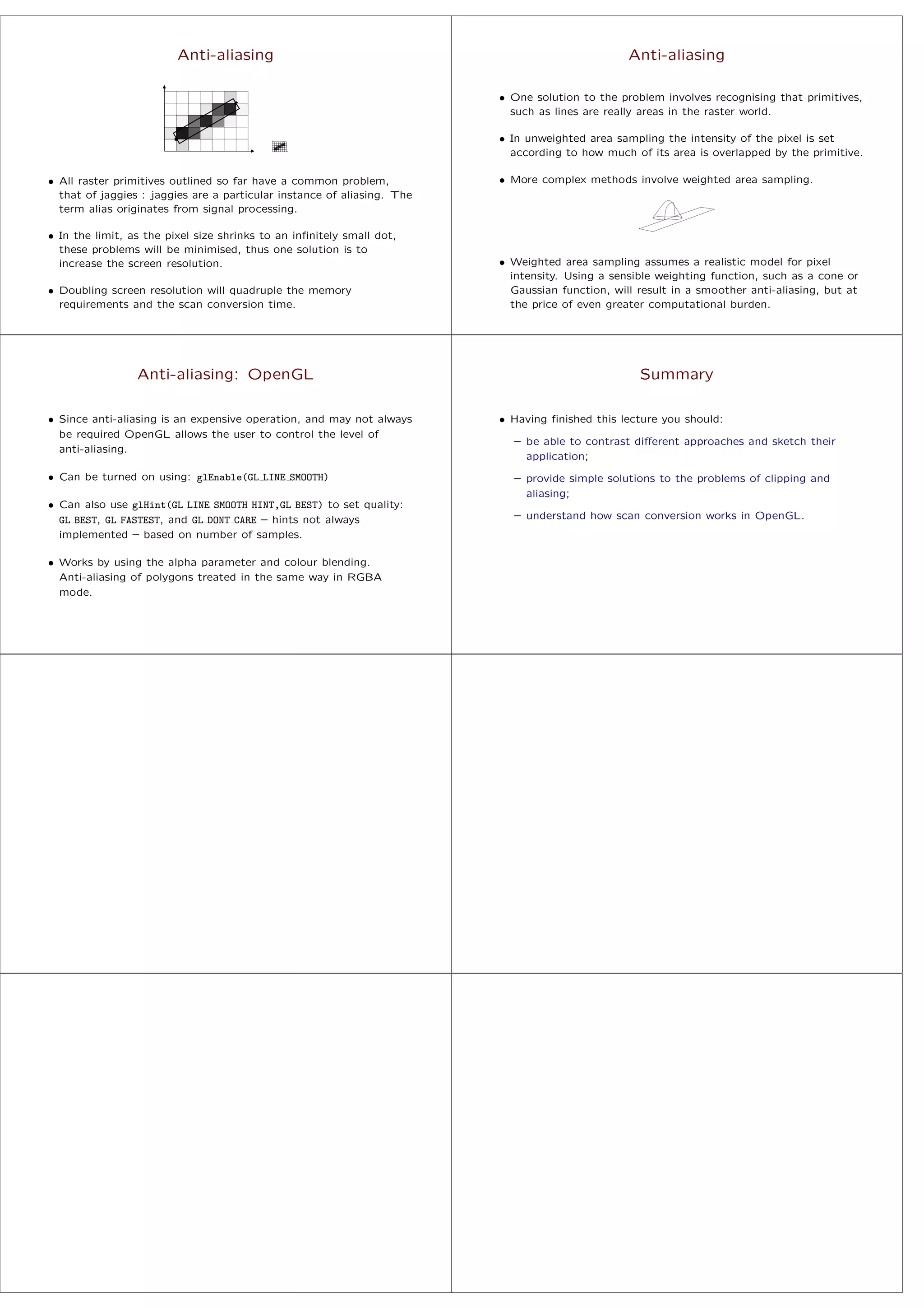

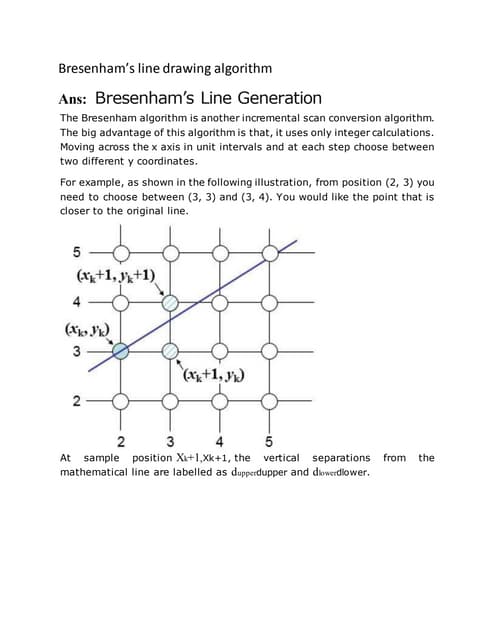
Scan conversion algorithms convert graphical primitives defined in terms of coordinates into pixels on a raster display. The midpoint line algorithm uses integer calculations to scan convert lines of varying slopes. Area primitives like rectangles are filled by iterating through pixels within the boundary. Anti-aliasing aims to reduce jagged edges by weighting pixel intensities based on overlap with graphical elements.