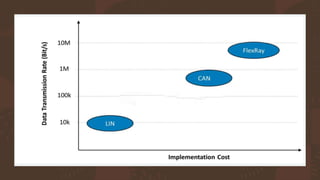
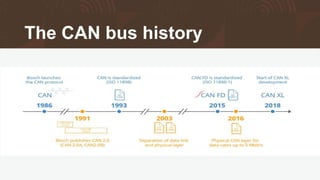
The document provides an overview of various communication protocols used in automotive systems, including Controller Area Network (CAN), Local Interconnect Network (LIN), FlexRay, and Automotive Ethernet, detailing their development, features, data rates, and typical applications. CAN, developed by Bosch in the 1980s, enables multiple microcontrollers to communicate reliably in vehicles, while LIN offers a cost-effective alternative for simpler tasks. Enhanced versions of CAN like CAN FD and CAN XL address modern automotive needs by supporting higher data rates and larger message payloads.