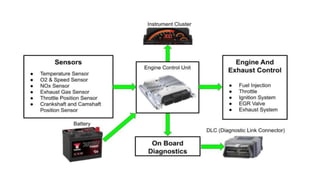
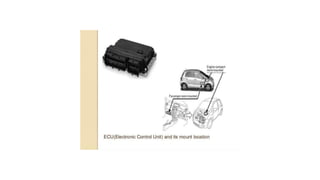
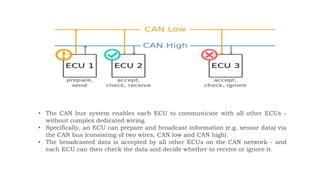
The document discusses the Controller Area Network (CAN) bus, which is used for communication between electronic control units (ECUs) in vehicles. The CAN bus allows ECUs to broadcast sensor and system status data to all other ECUs using a standardized message format. It has enabled advanced vehicle functionality by providing a robust and efficient communication standard. The CAN protocol continues to evolve through standards like CAN FD to support increasing vehicle connectivity and autonomous functionality demands.