This document provides an overview of linear programming problems (LPP), including:
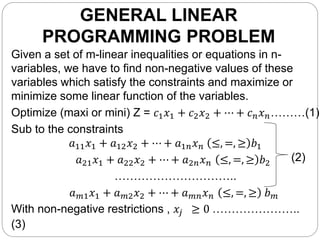
1) It defines the key components of an LPP as decision variables, an objective function, and constraints on available resources.
2) It describes methods for solving LPPs, including graphical and simplex methods. The simplex method algebraically identifies optimal extreme point solutions.
3) It explains some important theorems regarding LPPs, such as the fundamental theorem stating an optimal solution exists at an extreme point of the feasible region if it is finite.
4) It discusses degeneracy, which can occur when a solution has redundant constraints, and may result in alternative optima or an unbounded solution.



![SIMULTANEOUS LINEAR
EQUATIONS
Given m-simultaneous linear equations in n unknown
(m<n).
Given 𝐴 𝑥 = 𝑏
𝑗=1
𝑛
𝑎𝑖𝑗 𝑥𝑗 = 𝑏𝑖, (𝑖 = 1,2, … , 𝑚)
where 𝐴 = [𝑎𝑖𝑗] 𝑚×𝑛 , 𝑏 = [𝑏1, 𝑏2, … . , 𝑏 𝑚] and 𝑥 =
[𝑥1, 𝑥2, … , 𝑥 𝑛]. Let 𝐴 is an 𝑚 × 𝑛 matrix of rank m. Let 𝑏 be a
column matrix of m rows.
Degeneracy: A basic solution to 𝐴 𝑥 = 𝑏 is degenerate if
one or more of the basic variables vanish.](https://image.slidesharecdn.com/linearprogrammingproblem-200406133329/85/Linear-Programming-Problem-8-320.jpg)