Download as PPSX, PPTX



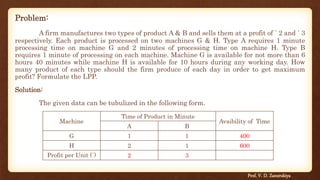
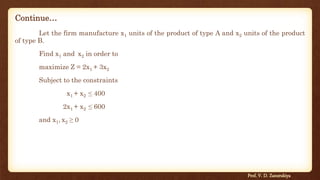





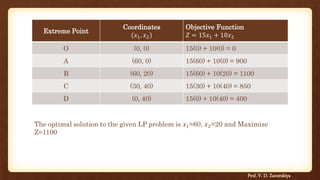


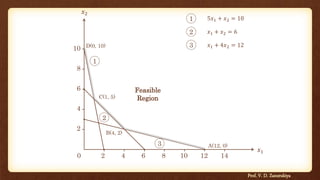





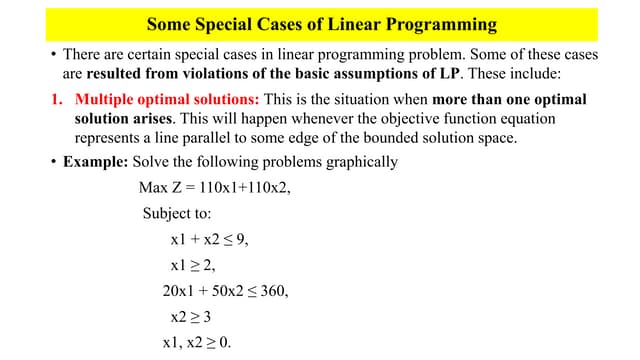
This document provides information about operation research and the graphical method for solving linear programming problems. It defines operation research and describes the general structure of a linear programming model, which includes decision variables, the objective function, and constraints. The document then formulates a sample linear programming problem and provides the step-by-step graphical solution, identifying the feasible region and finding the optimal solution that maximizes the objective function.