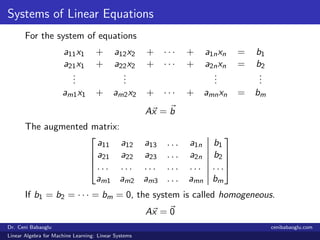
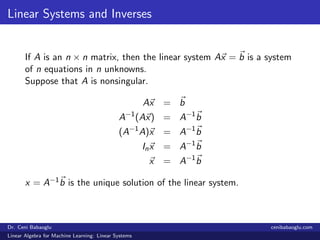
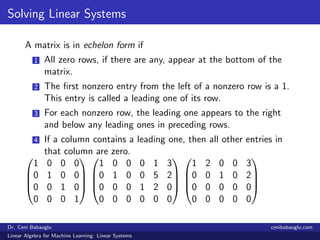
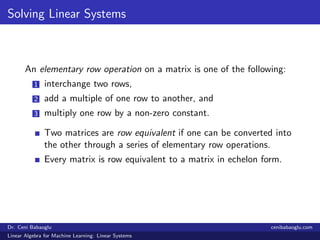
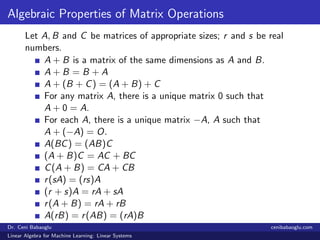
The document presents a seminar series on linear algebra for machine learning, focusing on linear systems. Key topics include matrices, matrix operations, special types of matrices, the inverse of matrices, determinants, and statistical applications like the correlation coefficient. It also covers solving systems of linear equations and matrix transformations, providing definitions, examples, and properties relevant to these concepts.
![Matrices
An m × n matrix
A =
a11 a12 a13 . . . a1n
a21 a22 a23 . . . a2n
...
...
...
...
...
am1 am2 am3 . . . amn
= [aij ]
The i th row of A is
A = ai1 ai2 ai3 . . . ain , (1 ≤ i ≤ m)
The j th column of A is
A =
a1j
a2j
...
amj
, (1 ≤ j ≤ n)
Dr. Ceni Babaoglu cenibabaoglu.com
Linear Algebra for Machine Learning: Linear Systems](https://image.slidesharecdn.com/linearalgebraformachinelearninglinearsystems-181015001657/85/1-Linear-Algebra-for-Machine-Learning-Linear-Systems-3-320.jpg)
![Matrix Operations
Matrix Addition
A + B = [aij ] + [bij ] , C = [cij ]
cij = aij + bij , i = 1, 2, · · · , m, j = 1, 2, · · · , n.
Scalar Multiplication
rA = r [aij ] , C = [cij ]
cij = r aij , i = 1, 2, · · · , m, j = 1, 2, · · · , n.
Transpose of a Matrix
AT
= aT
ij , aT
ij = aji
Dr. Ceni Babaoglu cenibabaoglu.com
Linear Algebra for Machine Learning: Linear Systems](https://image.slidesharecdn.com/linearalgebraformachinelearninglinearsystems-181015001657/85/1-Linear-Algebra-for-Machine-Learning-Linear-Systems-4-320.jpg)
![Special Types of Matrices
Diagonal Matrix
An n × n matrix A = [aij ] is called a diagonal matrix if aij = 0
for i = j
a 0 . . . 0
0 1 . . . 0
...
...
...
...
0 0 . . . 1
Identity Matrix
The scalar matrix In = [dij ], where dii = 1 and dij = 0 for
i = j, is called the n × n identity matrix
1 0 . . . 0
0 1 . . . 0
...
...
...
...
0 0 . . . 1
Dr. Ceni Babaoglu cenibabaoglu.com
Linear Algebra for Machine Learning: Linear Systems](https://image.slidesharecdn.com/linearalgebraformachinelearninglinearsystems-181015001657/85/1-Linear-Algebra-for-Machine-Learning-Linear-Systems-5-320.jpg)
![Special Types of Matrices
Upper Triangular Matrix
An n × n matrix A = [aij ] is called upper triangular if aij = 0
for i > j
2 b c
0 3 0
0 0 1
Lower Triangular Matrix
An n × n matrix A = [aij ] is called lower triangular if aij = 0
for i < j
2 0 0
0 3 0
a b 1
Dr. Ceni Babaoglu cenibabaoglu.com
Linear Algebra for Machine Learning: Linear Systems](https://image.slidesharecdn.com/linearalgebraformachinelearninglinearsystems-181015001657/85/1-Linear-Algebra-for-Machine-Learning-Linear-Systems-6-320.jpg)


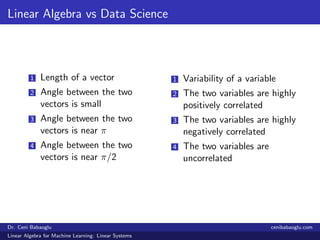
![A statistical application: Correlation Coefficient
Sample means of two attributes
¯x =
1
n
n
i=1
x, ¯y =
1
n
n
i=1
y
Centered form
xc = [x1 − ¯x x2 − ¯x · · · xn − ¯x]T
yc = [y1 − ¯y y2 − ¯y · · · yn − ¯y]T
Correlation coefficient
Cor(xc, yc) =
xc · yc
xc yc
r =
n
i=1(xi − ¯x)(yi − ¯y)
n
i=1(xi − ¯x)2 n
i=1(yi − ¯y)2
Dr. Ceni Babaoglu cenibabaoglu.com
Linear Algebra for Machine Learning: Linear Systems](https://image.slidesharecdn.com/linearalgebraformachinelearninglinearsystems-181015001657/85/1-Linear-Algebra-for-Machine-Learning-Linear-Systems-16-320.jpg)