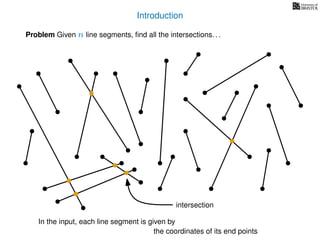
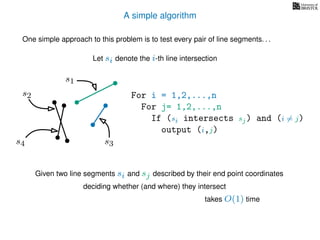
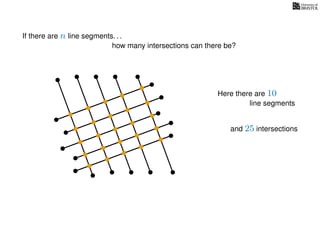
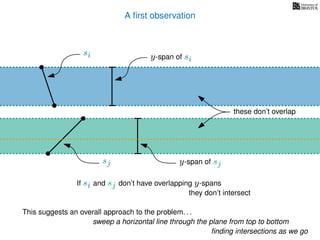
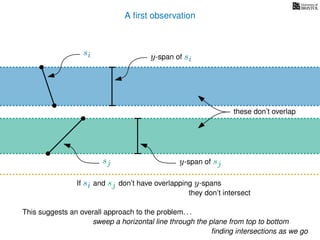
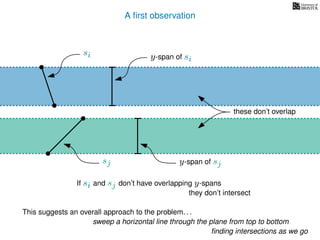
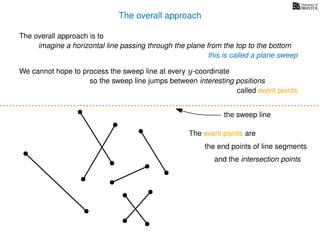
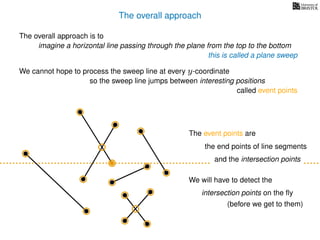
The document discusses the problem of finding all intersections between n line segments in a plane. It presents a basic algorithm that checks each pair of line segments for intersections, running in O(n^2) time, as well as a more efficient 'sweep line' approach that operates in O(n log n + k log n) time, considering the number of intersections k. Additionally, it emphasizes distinguishing segments based on their y-spans to determine potential intersections.