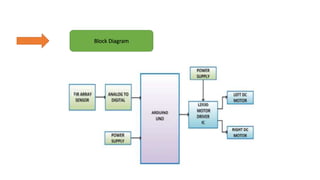
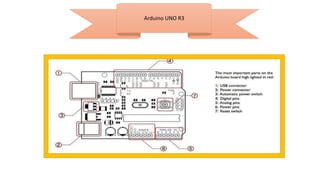
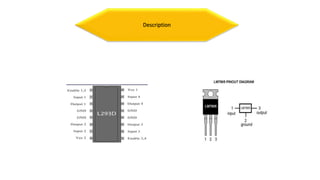
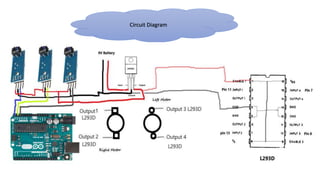
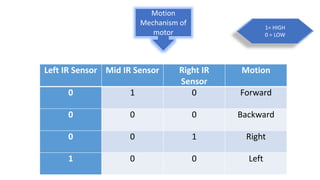
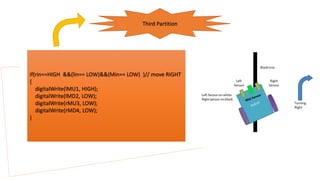
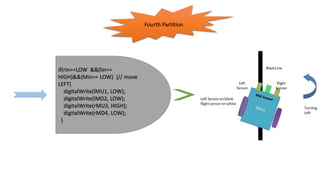
This document presents a line follower robot project created by two students for their electrical engineering semester project. It includes an introduction to line follower robots, the components used including IR sensors, motors, an Arduino UNO and L293D IC. It then describes the methodology, circuit diagram, coding in Arduino, and concludes with applications for line follower robots and references used.