Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
aartid4
4 views
its an artificial intelligence project work
its an artificial intelligence project work
Career
◦
Read more
0
Save
Share
Embed
Embed presentation
1
/ 10
2
/ 10
3
/ 10
4
/ 10
5
/ 10
6
/ 10
7
/ 10
8
/ 10
9
/ 10
10
/ 10
More Related Content
PDF
Line Following Robot LFR - Project Report
by
Independent University Bangladesh
PPTX
LIne Follower Robot Using Arduino Uno.pptx
by
jaiveersheela1
PDF
Robotics ( term work) for engineering.pdf
by
kavita5264689
PPTX
Line Following Robot
by
Self-employed
PPTX
Line Following Robot
by
Vikram Jha
PPTX
Line Following Robot Using Arduino
by
Samuel Manoj Palani
PPTX
LINE FOLLOWER ROBOT
by
Mohit Kumar
DOCX
AI_Lab MANUAL.docx it has 50 different programs
by
shakthipriyaaids
Line Following Robot LFR - Project Report
by
Independent University Bangladesh
LIne Follower Robot Using Arduino Uno.pptx
by
jaiveersheela1
Robotics ( term work) for engineering.pdf
by
kavita5264689
Line Following Robot
by
Self-employed
Line Following Robot
by
Vikram Jha
Line Following Robot Using Arduino
by
Samuel Manoj Palani
LINE FOLLOWER ROBOT
by
Mohit Kumar
AI_Lab MANUAL.docx it has 50 different programs
by
shakthipriyaaids
Similar to its an artificial intelligence project work
DOCX
AI_Lab MANUAL.docx it contains 50 AI robotics program
by
shakthipriyaaids
PPTX
Line follower robot with using Arduino based
by
harshithamandya49
PPTX
Line follower Robot with Arduino
by
Muhammad Hammad Aslam
PPTX
Line_Following_Robot_English_Presentation.pptx
by
hassanrafaqat21
PPTX
Line Follower.pptx
by
awaisahmadsiddiqi
PPTX
the Line Following Robot with full efficiency pptx
by
saeed akhtar
PDF
Electronic system line follower Rrrobot.pdf
by
xxkokikifanxx
PPTX
Black Line Following Robot Project .pptx
by
themonarch188
PPTX
ARDUINO UNO HUMAN FOLLOWING ROBOT .
by
ujwalsgowda2006
PPTX
Line Following Robot using Arduino UNO
by
Viswanadh Ivaturi
PPTX
Robotics
by
guru nanak institute of technology
DOC
Front
by
Ritesh Raj
PPTX
Presentation1
by
Paras Mishra
PDF
Fundamental of Line-Following-Robot with Example
by
TuhinHossain37
PDF
Line follower12
by
Tushar attar
PDF
Design and Construction of Line Following Robot using Arduino
by
ijtsrd
PPTX
ECD PROJEXT.pptx
by
JavaidMusaBojol
PPTX
Line following Report presentation
by
Sujeet Kumar Jha
PPTX
The presentation on line follower robot.
by
mansigaikwad273
PPTX
line following robot project.pptx line following projects ver good project
by
nayakitishree758
AI_Lab MANUAL.docx it contains 50 AI robotics program
by
shakthipriyaaids
Line follower robot with using Arduino based
by
harshithamandya49
Line follower Robot with Arduino
by
Muhammad Hammad Aslam
Line_Following_Robot_English_Presentation.pptx
by
hassanrafaqat21
Line Follower.pptx
by
awaisahmadsiddiqi
the Line Following Robot with full efficiency pptx
by
saeed akhtar
Electronic system line follower Rrrobot.pdf
by
xxkokikifanxx
Black Line Following Robot Project .pptx
by
themonarch188
ARDUINO UNO HUMAN FOLLOWING ROBOT .
by
ujwalsgowda2006
Line Following Robot using Arduino UNO
by
Viswanadh Ivaturi
Robotics
by
guru nanak institute of technology
Front
by
Ritesh Raj
Presentation1
by
Paras Mishra
Fundamental of Line-Following-Robot with Example
by
TuhinHossain37
Line follower12
by
Tushar attar
Design and Construction of Line Following Robot using Arduino
by
ijtsrd
ECD PROJEXT.pptx
by
JavaidMusaBojol
Line following Report presentation
by
Sujeet Kumar Jha
The presentation on line follower robot.
by
mansigaikwad273
line following robot project.pptx line following projects ver good project
by
nayakitishree758
Recently uploaded
PDF
Collazo, Angie - 2021-2025 B.S, Portfolio
by
angiecollazo02
PDF
The Collective Mind | January 2026 - Foundations | Clarity Before Speed
by
Jharna Jagtiani
PPTX
ARTEIAL DISEASE / PVD - This PPT done by me for undergraduate education - Dr...
by
Paran Jyothi
PPTX
Physical Properties of Gasses, This expalins the Characteristics of Gasses su...
by
BERNADETTEVIDONPANGI1
PPTX
Black and White Modern Industrial Revolution Presentation.pptx
by
bernidodaphne308
PDF
Complete biodata of I Gusti Haris pradana or Muhamad Abdul Haris
by
Dolan Ijen Tour
PDF
PTE Describe Image Template pdf.pdf |Gurully
by
Gurully
PPTX
Calendar powerpoint 2024 the flower heart
by
babysocool96
PPTX
Types of microbes in Microbiology ppptx none
by
leylanoorabdullahi
PDF
Common CDR Report Mistakes for Skill Assessment Engineers Must Avoid
by
CDRWriters2
PDF
introduction-to-human-rights-education.pdf
by
DreiEstrada
PDF
Customer Success 101: CSM Phone Playbook | csmis.org
by
hiscry
PPTX
Career and Business Opportunities in Industrial Arts
by
elaine868207
PPTX
Azure DevOps Training in Chennai - Azure DevOps Online Training.pptx
by
ranjithvisualpath44
PPTX
The Rule of 3: A Time Management System That Actually Works
by
Semantic SEO BD
PPTX
PM-KISAN VC_11.09.25.pptxcrddddddddddddd
by
eepdya
PDF
KG2025-Lecture-01-print.pdffffffffffffffffffff
by
franciscofcasas
PPTX
Ephemeral.pptx ccccccccccccccccccccccccc
by
ziontesalona21
PDF
Bow Spring Centralizer -API 10d 7th edition training
by
AshutoshPandey480
PPTX
difference between ISO 27001 and ISO 27002.pptx
by
saabest4
Collazo, Angie - 2021-2025 B.S, Portfolio
by
angiecollazo02
The Collective Mind | January 2026 - Foundations | Clarity Before Speed
by
Jharna Jagtiani
ARTEIAL DISEASE / PVD - This PPT done by me for undergraduate education - Dr...
by
Paran Jyothi
Physical Properties of Gasses, This expalins the Characteristics of Gasses su...
by
BERNADETTEVIDONPANGI1
Black and White Modern Industrial Revolution Presentation.pptx
by
bernidodaphne308
Complete biodata of I Gusti Haris pradana or Muhamad Abdul Haris
by
Dolan Ijen Tour
PTE Describe Image Template pdf.pdf |Gurully
by
Gurully
Calendar powerpoint 2024 the flower heart
by
babysocool96
Types of microbes in Microbiology ppptx none
by
leylanoorabdullahi
Common CDR Report Mistakes for Skill Assessment Engineers Must Avoid
by
CDRWriters2
introduction-to-human-rights-education.pdf
by
DreiEstrada
Customer Success 101: CSM Phone Playbook | csmis.org
by
hiscry
Career and Business Opportunities in Industrial Arts
by
elaine868207
Azure DevOps Training in Chennai - Azure DevOps Online Training.pptx
by
ranjithvisualpath44
The Rule of 3: A Time Management System That Actually Works
by
Semantic SEO BD
PM-KISAN VC_11.09.25.pptxcrddddddddddddd
by
eepdya
KG2025-Lecture-01-print.pdffffffffffffffffffff
by
franciscofcasas
Ephemeral.pptx ccccccccccccccccccccccccc
by
ziontesalona21
Bow Spring Centralizer -API 10d 7th edition training
by
AshutoshPandey480
difference between ISO 27001 and ISO 27002.pptx
by
saabest4
its an artificial intelligence project work
1.
PROJECT- Line Following Robot Made
by- KHUSHI MAITHANI VIII C
2.
CONTENT Circuit Diagram Required Component Program
Sheet Project Image
3.
CIRCUIT DIAGRAM
4.
REQUIRED COMPONENTS Arduino UNO
- 1 L293D Module - 1 IR sensor Module - 2
5.
Metal Robot Chassis -
1 L-Shaped Geared DC Motors - 2 Castor Wheel - 2
6.
Geared DC Motor Wheel
- 2 Male to Male & Female to Male Wires 9V Battery with Connector - 2
7.
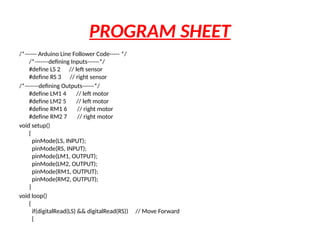
PROGRAM SHEET /*------ Arduino
Line Follower Code----- */ /*-------defining Inputs------*/ #define LS 2 // left sensor #define RS 3 // right sensor /*-------defining Outputs------*/ #define LM1 4 // left motor #define LM2 5 // left motor #define RM1 6 // right motor #define RM2 7 // right motor void setup() { pinMode(LS, INPUT); pinMode(RS, INPUT); pinMode(LM1, OUTPUT); pinMode(LM2, OUTPUT); pinMode(RM1, OUTPUT); pinMode(RM2, OUTPUT); } void loop() { if(digitalRead(LS) && digitalRead(RS)) // Move Forward {
8.
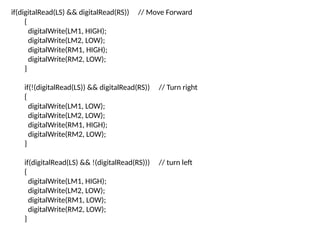
if(digitalRead(LS) && digitalRead(RS))
// Move Forward { digitalWrite(LM1, HIGH); digitalWrite(LM2, LOW); digitalWrite(RM1, HIGH); digitalWrite(RM2, LOW); } if(!(digitalRead(LS)) && digitalRead(RS)) // Turn right { digitalWrite(LM1, LOW); digitalWrite(LM2, LOW); digitalWrite(RM1, HIGH); digitalWrite(RM2, LOW); } if(digitalRead(LS) && !(digitalRead(RS))) // turn left { digitalWrite(LM1, HIGH); digitalWrite(LM2, LOW); digitalWrite(RM1, LOW); digitalWrite(RM2, LOW); }
9.
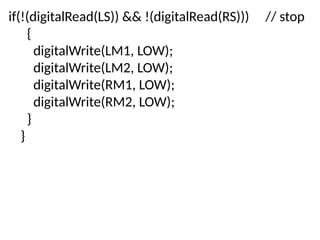
if(!(digitalRead(LS)) && !(digitalRead(RS)))
// stop { digitalWrite(LM1, LOW); digitalWrite(LM2, LOW); digitalWrite(RM1, LOW); digitalWrite(RM2, LOW); } }
10.
PROJECT IMAGE