**Obstacle Avoidance Robot: Design and Development**
### **Introduction**
Obstacle avoidance is a fundamental requirement for autonomous robots to navigate their environments efficiently and safely. An **Obstacle Avoidance Robot** (OAR) is designed to detect and avoid obstacles while moving through a predefined or unknown space. These robots have applications in various fields such as industrial automation, search and rescue operations, autonomous vehicles, and home automation. The primary goal of an obstacle avoidance system is to enable the robot to move independently without human intervention while preventing collisions.
### **Working Principle of an Obstacle Avoidance Robot**
The obstacle avoidance robot relies on sensors to detect obstructions in its path and makes real-time decisions to navigate safely. The general working principle involves:
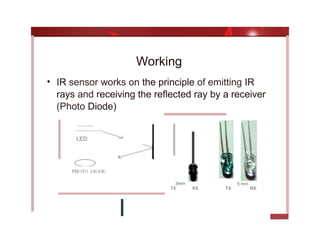
1. **Sensor Detection:** The robot uses sensors such as ultrasonic, infrared (IR), or LiDAR to scan its surroundings.
2. **Data Processing:** The data from the sensors is processed using a microcontroller or an onboard computer to identify potential obstacles.
3. **Decision Making:** Based on the sensor input, an algorithm determines the best possible path to avoid obstacles.
4. **Actuation:** The motor driver executes the movement commands, steering the robot away from obstructions.
### **Components of an Obstacle Avoidance Robot**
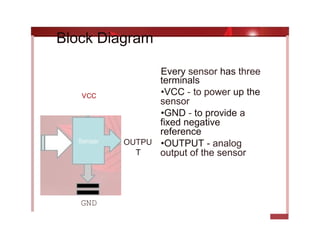
#### **1. Sensors**
- **Ultrasonic Sensors:** Emit sound waves and measure the time taken for the echo to return, allowing for distance measurement.
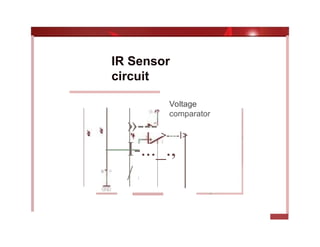
- **Infrared Sensors:** Detect objects by measuring the reflection of IR rays.
- **LiDAR (Light Detection and Ranging):** Provides a high-resolution 3D map of the surroundings by measuring reflected laser light.
- **Camera/Vision Sensors:** Used in advanced robots to detect and classify obstacles using image processing.
#### **2. Microcontroller or Processor**
- **Arduino:** Commonly used for basic robots due to ease of programming and affordability.
- **Raspberry Pi:** Preferred for robots that require image processing and machine learning.
- **Microcontrollers like PIC or STM32:** Used in real-time embedded systems for fast decision-making.
#### **3. Motor Driver and Actuators**
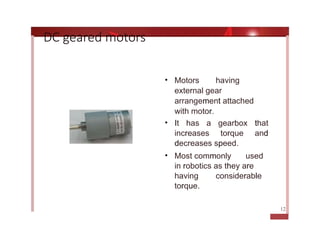
- **DC Motors or Servo Motors:** Drive the wheels or legs of the robot.
- **Stepper Motors:** Used for precise movement control.
- **Motor Driver Circuit:** Controls the power and direction of motors (e.g., L298N, H-Bridge circuits).
#### **4. Power Supply**
- **Battery Pack:** Lithium-ion or lead-acid batteries provide power.
- **Solar Panels:** Used for sustainable energy in outdoor applications.
#### **5. Software and Algorithms**
- **Embedded C/Python:** Programming languages used for robot control.
- **Artificial Intelligence (AI) and Machine Learning