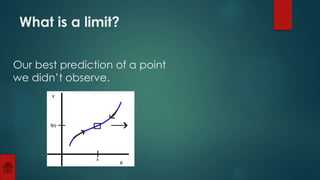
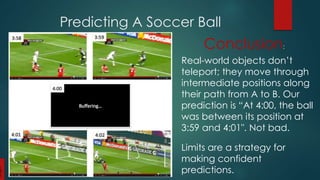
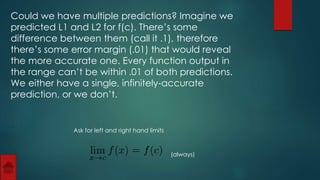
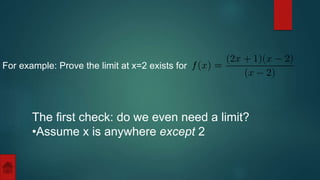
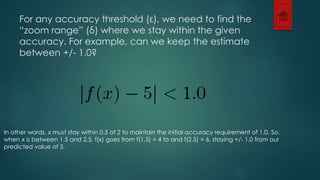
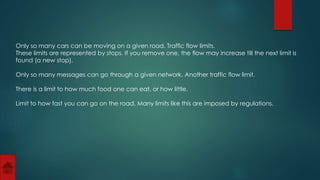
The document discusses limits and their applications. It defines a limit as our best prediction of a value we cannot directly observe. Limits are useful for scenarios in mathematics that involve division by zero or going to infinity. Real-world objects move continuously between positions, so limits allow us to make accurate predictions. The document provides examples of using limits to predict the position of a soccer ball in a video and discusses how limits apply in areas like physics, engineering, and natural phenomena.