Download as PDF, PPTX



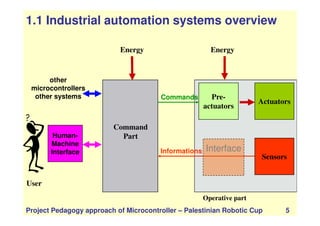
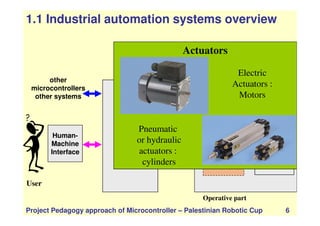
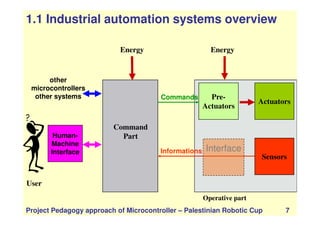
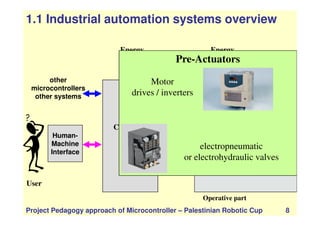
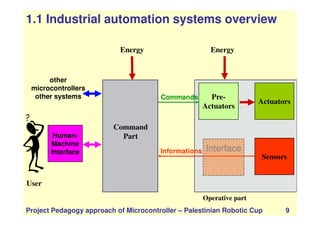
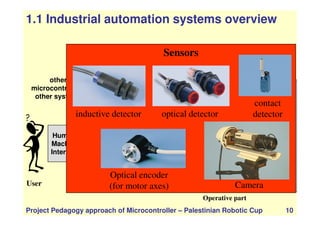
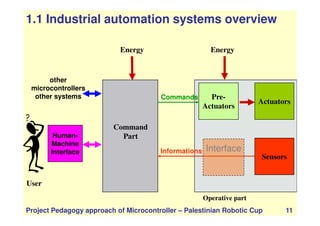
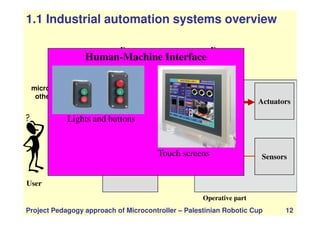
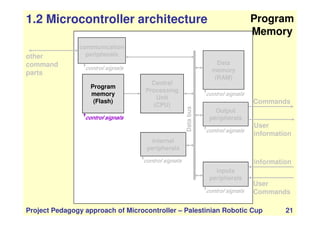
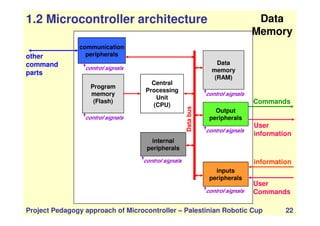
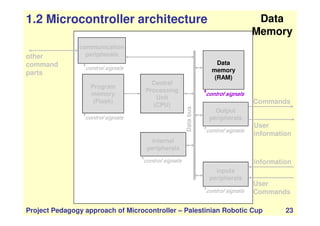
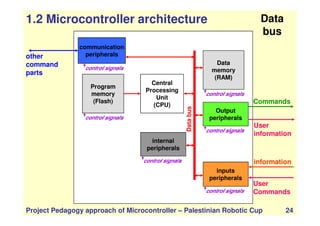
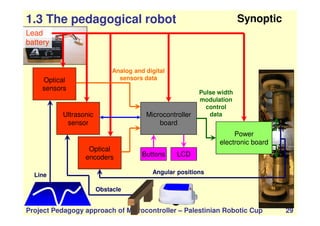
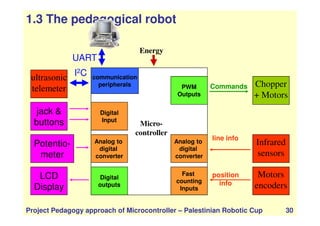
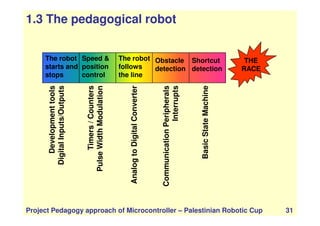

The document outlines the pedagogical approach to microcontroller education, specifically within the context of the Palestinian Robotic Cup project. It covers various aspects such as microcontroller architecture, industrial automation systems, and the integration of sensors, actuators, and human-machine interfaces. Additionally, it details programming techniques and applications for automating tasks and controlling devices within an educational framework.