Download as PDF, PPTX
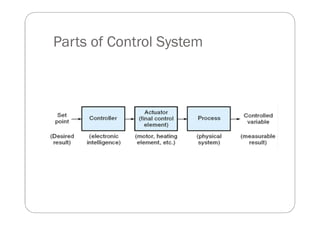
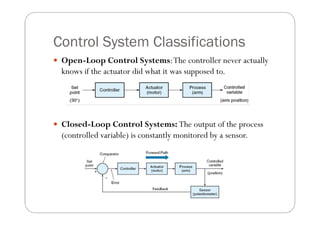
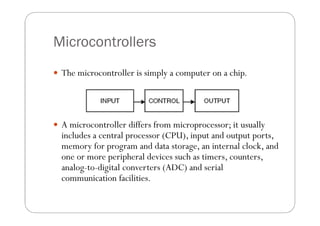
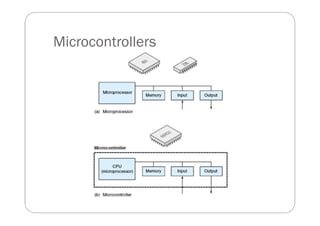

The document provides an overview of a lab course focused on PIC microcontrollers and control systems, detailing components such as controllers, actuators, and the differences between open-loop and closed-loop systems. It introduces microcontrollers, specifically the PIC family and the features of the PIC16F877A model, highlighting its specifications and advantages. The course will cover practical applications including LED control, programming concepts, and interfacing with various devices.










![Pic microcontroller [autosaved] [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/picmicrocontrollerautosavedautosaved-120427093459-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)