Downloaded 23 times




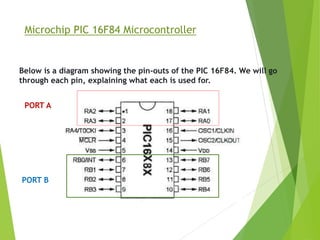







This document provides an introduction to PIC microcontrollers. It discusses that PIC stands for "Programmable Intelligent Computer" and that a PIC microcontroller is a processor with built-in memory and RAM that can be used to control projects. It then lists some of the useful built-in modules of PIC microcontrollers like EEPROM, timers, and analog comparators. The document also discusses why PIC microcontrollers are popular, which includes their low cost, wide availability, and small size. It then provides details on the pins of the common PIC 16F84 microcontroller and describes its registers and peripherals. Finally, it gives a simple code example using ports on the PIC 16F84
![Pic microcontroller [autosaved] [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/picmicrocontrollerautosavedautosaved-120427093459-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)