This document provides an introduction to robotics, covering its history, definitions, laws, and applications. It discusses how the word "robot" was coined in a 1920 play, defines a robot as a reprogrammable, multifunctional manipulator, and outlines Isaac Asimov's Three Laws of Robotics to ensure robots don't harm humans. The document also summarizes different types and applications of robots in industries like manufacturing, space, hazardous environments, medicine, and more.
Unit I -Lecture 1
Introduction to Robotics
Course Title Robotics and Applications
Course Code 21CDE09
Class II B.Sc. Computer Science
Facilitator
Lavanya.G
Assistant Professor
Department of Electronics and Communication Systems
SRI KRISHNA ARTS AND SCIENCE COLLEGE
Department of Electronics and CommunicationSystems
Coimbatore - 641 008
1
1
Unit Lecture 1 : Introduction to Robotics
2.
Outline
Lecture 1 :Introduction to Robotics
Unit 1 2
Introduction to Robotics:
• History
• Laws of Robotics
• Robot Definition
• Robot Usage Rules
• Applications
3.
History of Robotics
Lecture1 : Introduction to Robotics
Unit 1 3
• Origin – Traced in Czech word ‘robota’
• Means - ‘Forced’ / ‘Compusory labour’
• The word ‘robot’ first appeared in 1921 in the play RUR
(“Rossum's Universal Robots”) – written by Czech Writer Karel
Capek (1890-1938)
• Issac Asimov (1940) – Science fiction stories – envisioned the
robot as a helper of mankind
• Postulated 3 basic rules for robots
4.
History of Robotics
Lecture1 : Introduction to Robotics
Unit 1 4
• Inspired by Asimov’s Books on Robots – Joseph F. Engelberger
tried to design a robot in 1950.
• He along with George C. Devol started UNIMATION Robotics
Company in USA – 1958
• The first Unimate robot – installed in 1961 in General Motors
Automobile Factory – New Jersey.
5.
Introduction to Robotics
Lecture1 : Introduction to Robotics
Unit 1 5
• Japanese Industrial Robot Association (JIRA) :
• “A device with degrees of freedom that can be controlled.”
• Class 1 : Manual handling device
• Class 2 : Fixed sequence robot
• Class 3 : Variable sequence robot
• Class 4 : Playback robot
• Class 5 : Numerical control robot
• Class 6 : Intelligent robot
6.
Introduction to Robotics
Lecture1 : Introduction to Robotics
Unit 1 6
• Intelligent Environments are aimed at improving the
inhabitants’ experience and task performance
• Automate functions in the home
• Provide services to the inhabitants
• Decisions coming from the decision maker(s) in the
environment have to be executed.
7.
Introduction to Robotics
Lecture1 : Introduction to Robotics
Unit 1 7
• Decisions require actions to be performed on devices
• Decisions are frequently not elementary device interactions but
rather relatively complex commands
• Decisions define set points or results that have to be achieved
• Decisions can require entire tasks to be performed
8.
Definition of Robot
Lecture1 : Introduction to Robotics
Unit 1 8
An electromechanical device that is:
• Reprogrammable
• Multifunctional
• Sensible for environment
• Robot, any automatically operated machine that replaces human
effort, though it may not resemble human beings in appearance or
perform functions in ahumanlike manner.
9.
Definition of Robot
Lecture1 : Introduction to Robotics
Unit 1 9
According to Robot Institute of America(RIA):
• It is a reprogrammable multi-functional
manipulator designed to move materials, parts, tools or
specialized devices through variable programmed motions
for the performance of a variety of tasks.
• There exist several other too given by other societies, e.g.,
The Japan Industrial Robot Association (JIAR),British
Association (BRA), and All others.
• Reprogrammable, multifunctional manipulator designed to
move material through variable programmed motions for the
performance of a variety of tasks. (ISO)
10.
Introduction to Robotics
Lecture1 : Introduction to Robotics
Unit 1 10
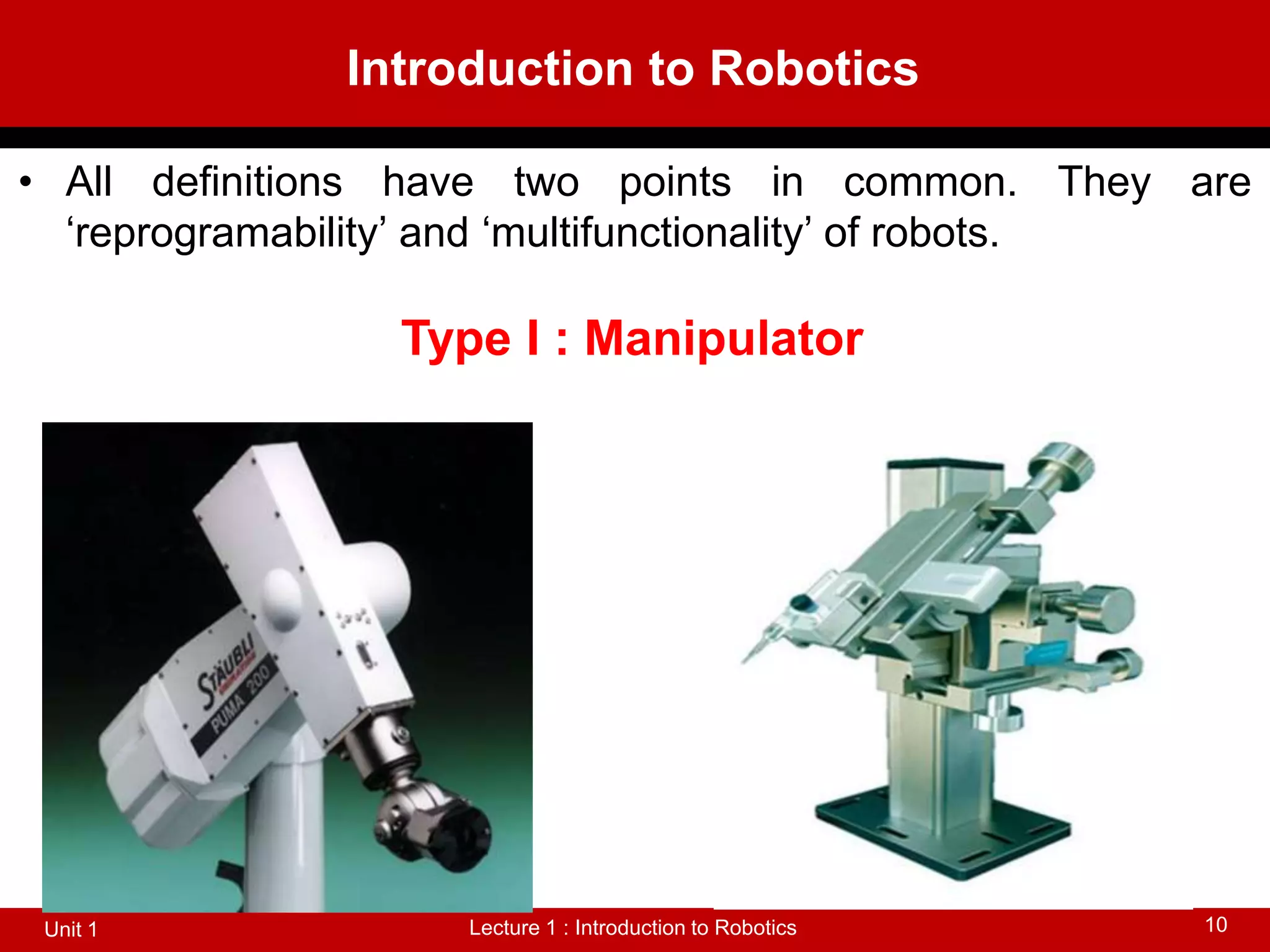
• All definitions have two points in common. They are
‘reprogramability’ and ‘multifunctionality’ of robots.
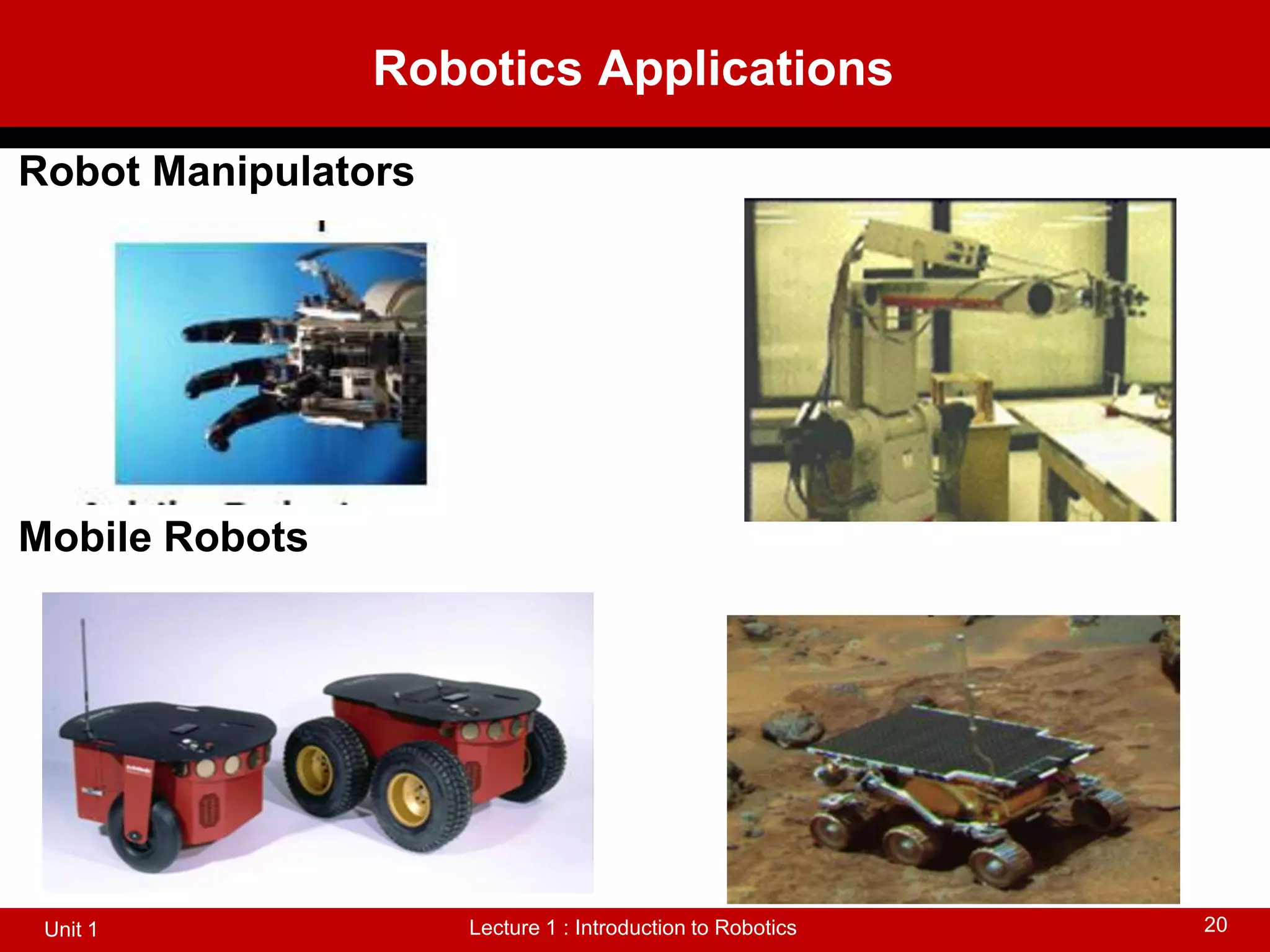
Type I : Manipulator
Introduction to Robotics
Lecture1 : Introduction to Robotics
Unit 1 12
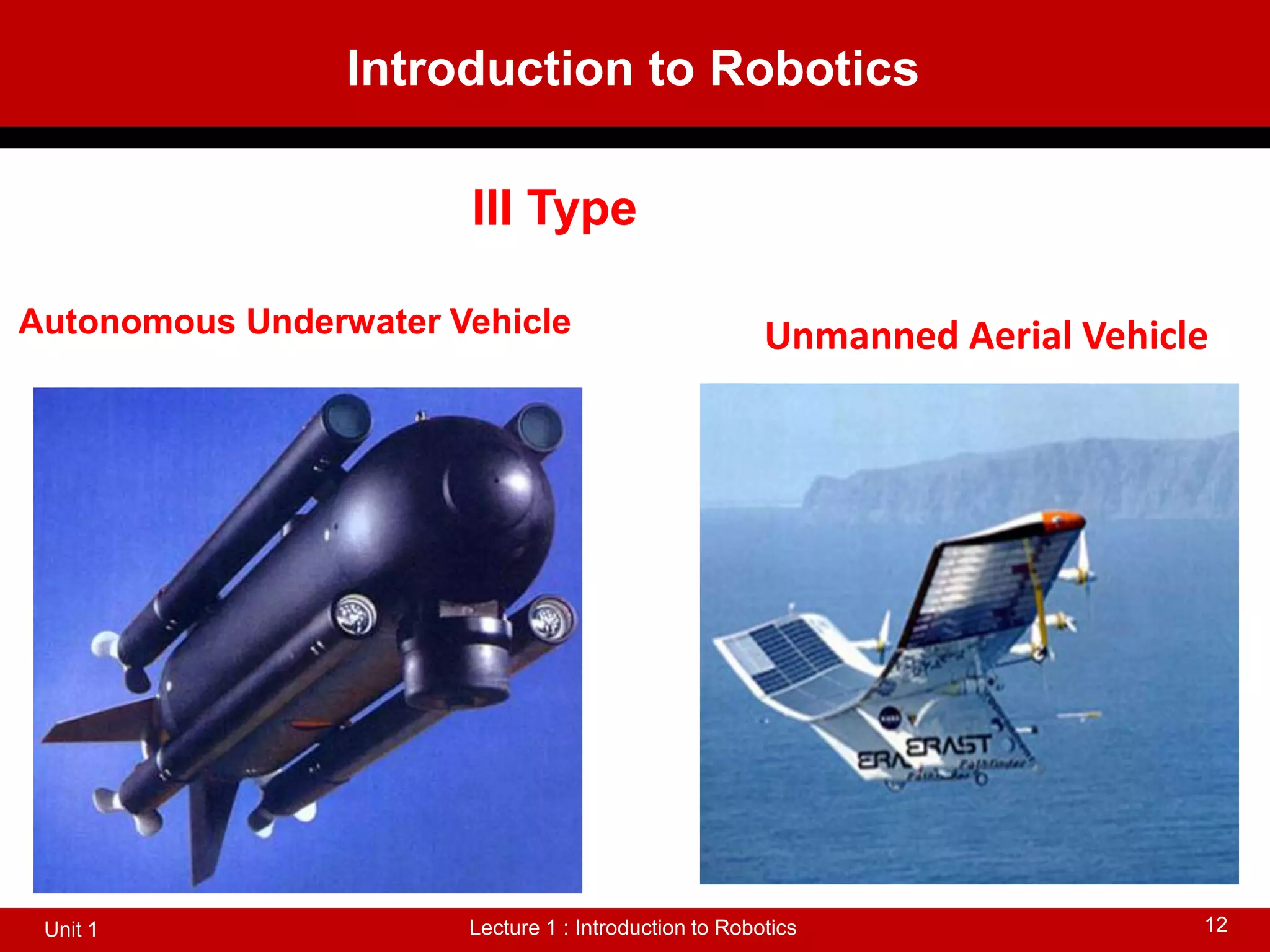
III Type
Autonomous Underwater Vehicle Unmanned Aerial Vehicle
13.
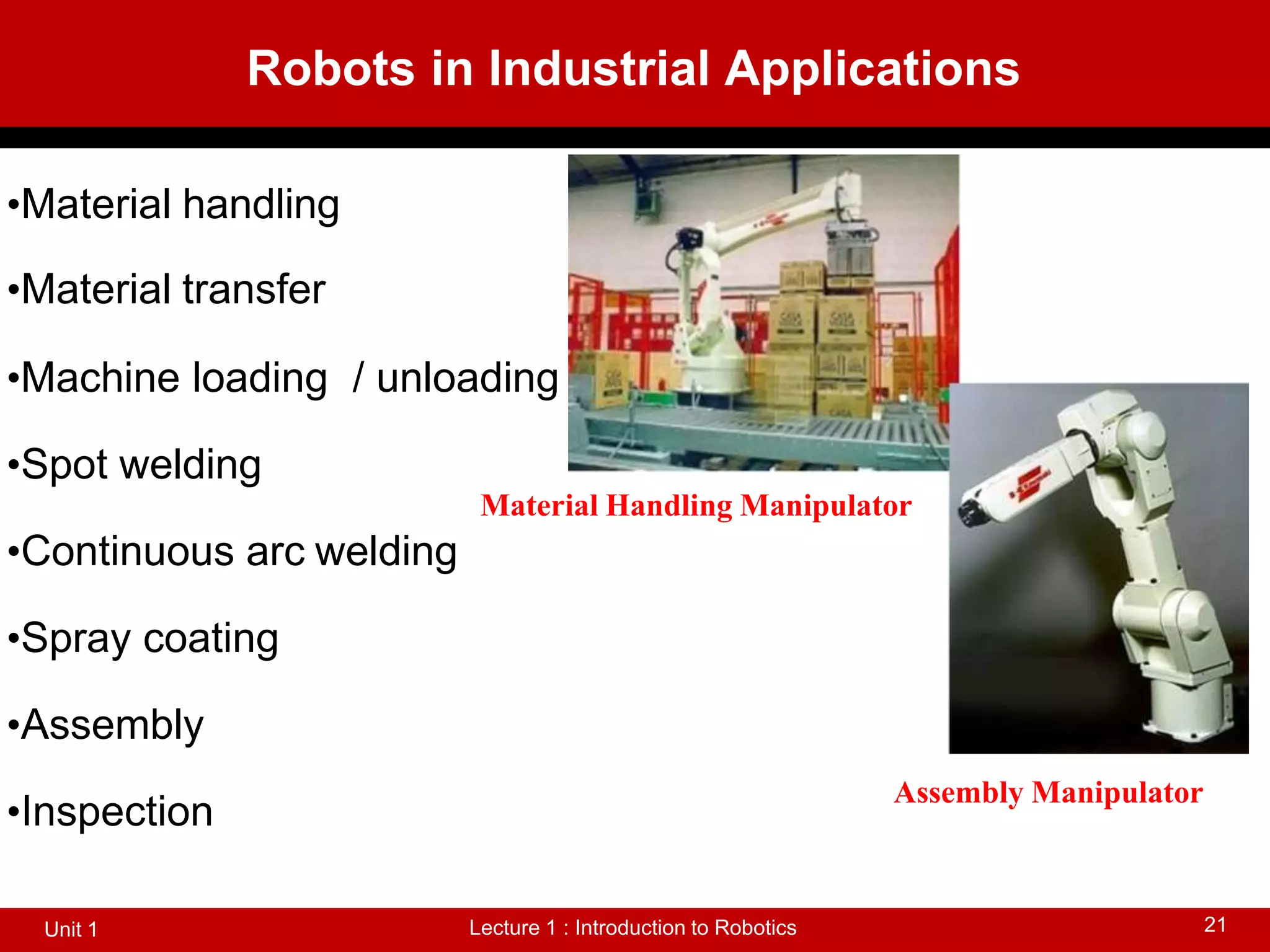
Robotics Applications
Lecture 1: Introduction to Robotics
Unit 1 13
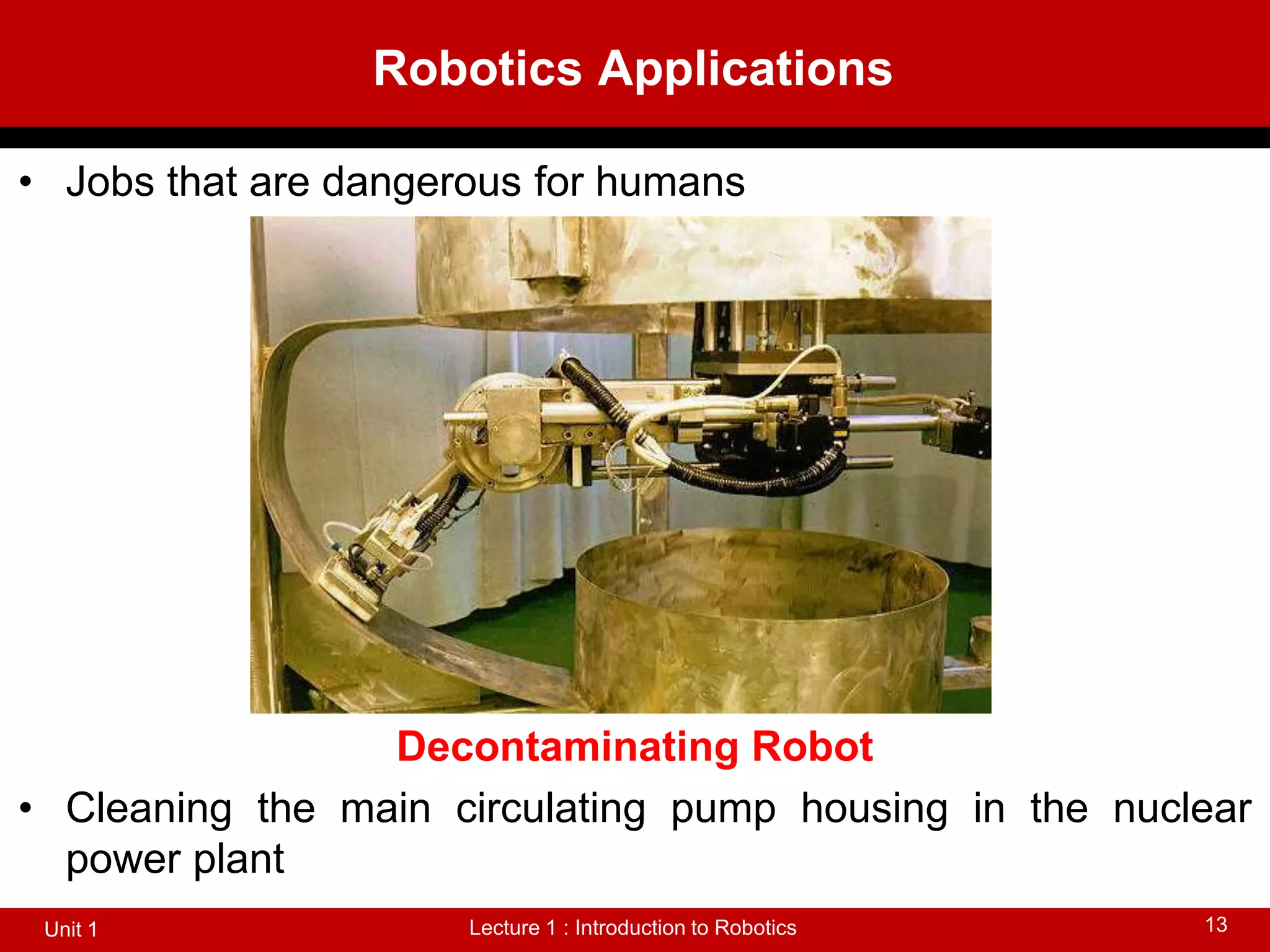
• Jobs that are dangerous for humans
Decontaminating Robot
• Cleaning the main circulating pump housing in the nuclear
power plant
14.
Robotics Applications
Lecture 1: Introduction to Robotics
Unit 1 14
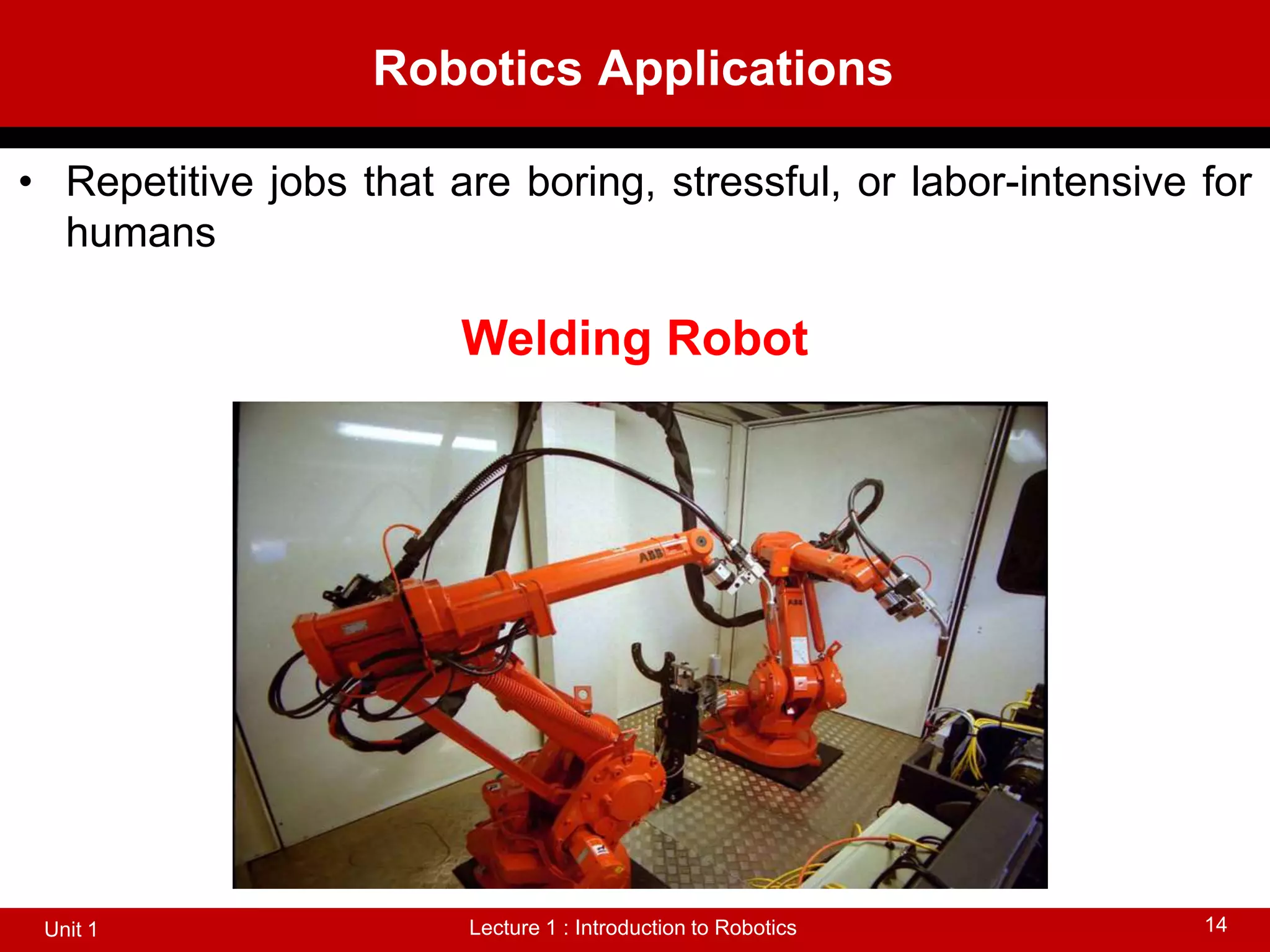
• Repetitive jobs that are boring, stressful, or labor-intensive for
humans
Welding Robot
15.
Robotics Applications
Lecture 1: Introduction to Robotics
Unit 1 15
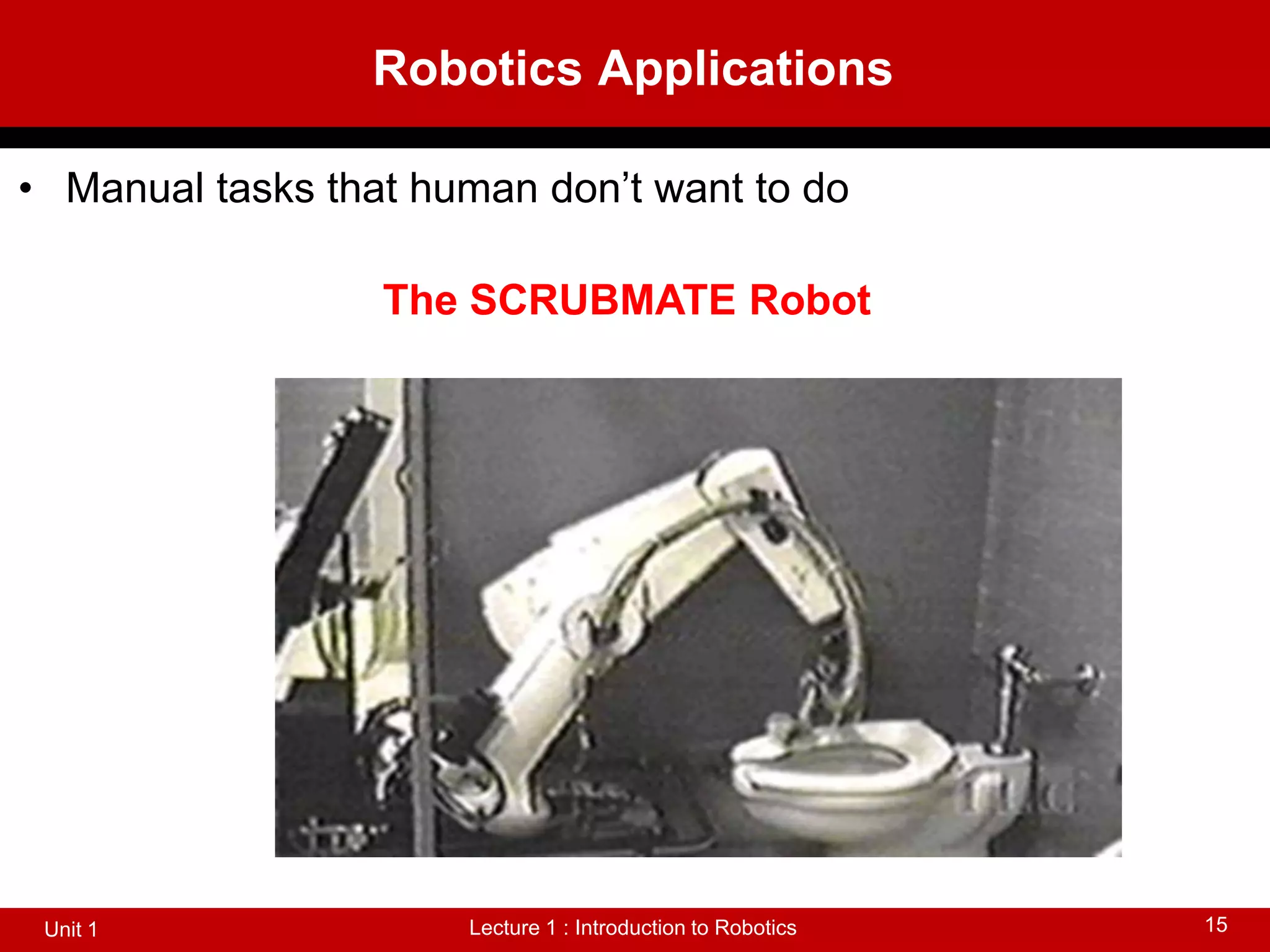
• Manual tasks that human don’t want to do
The SCRUBMATE Robot
16.
What is Robotics?
Lecture 1 : Introduction to Robotics
Unit 1 16
Branch oftechnologythat dealswith
• thedesign
• construction
• Operation
• application of robots
17.
Robotics Applications
Lecture 1: Introduction to Robotics
Unit 1 17
Difference between robot and machine :
• The robot is a mechanical device that can perform physical tasks using
the surveillance and control of man.
(or )
• use aprogram that hasbeen defined first (artificial intelligence).
• Machine is a mechanical or electrical appliance that send or change
the energy to perform or assist in the implementation of human tasks.
18.
Robotics Applications
Lecture 1: Introduction to Robotics
Unit 1 18
Control of the physical environment
Automated blinds
Thermostats and heating ducts
Automatic doors
Automatic room partitioning
Personal service robots
House cleaning
Lawn mowing
Assistance to the elderly and handicapped
Office assistants
Security services
19.
Robots in differentIndustries
Lecture 1 : Introduction to Robotics
Unit 1 19
•Agriculture
•Automobile
•Construction
•Entertainment
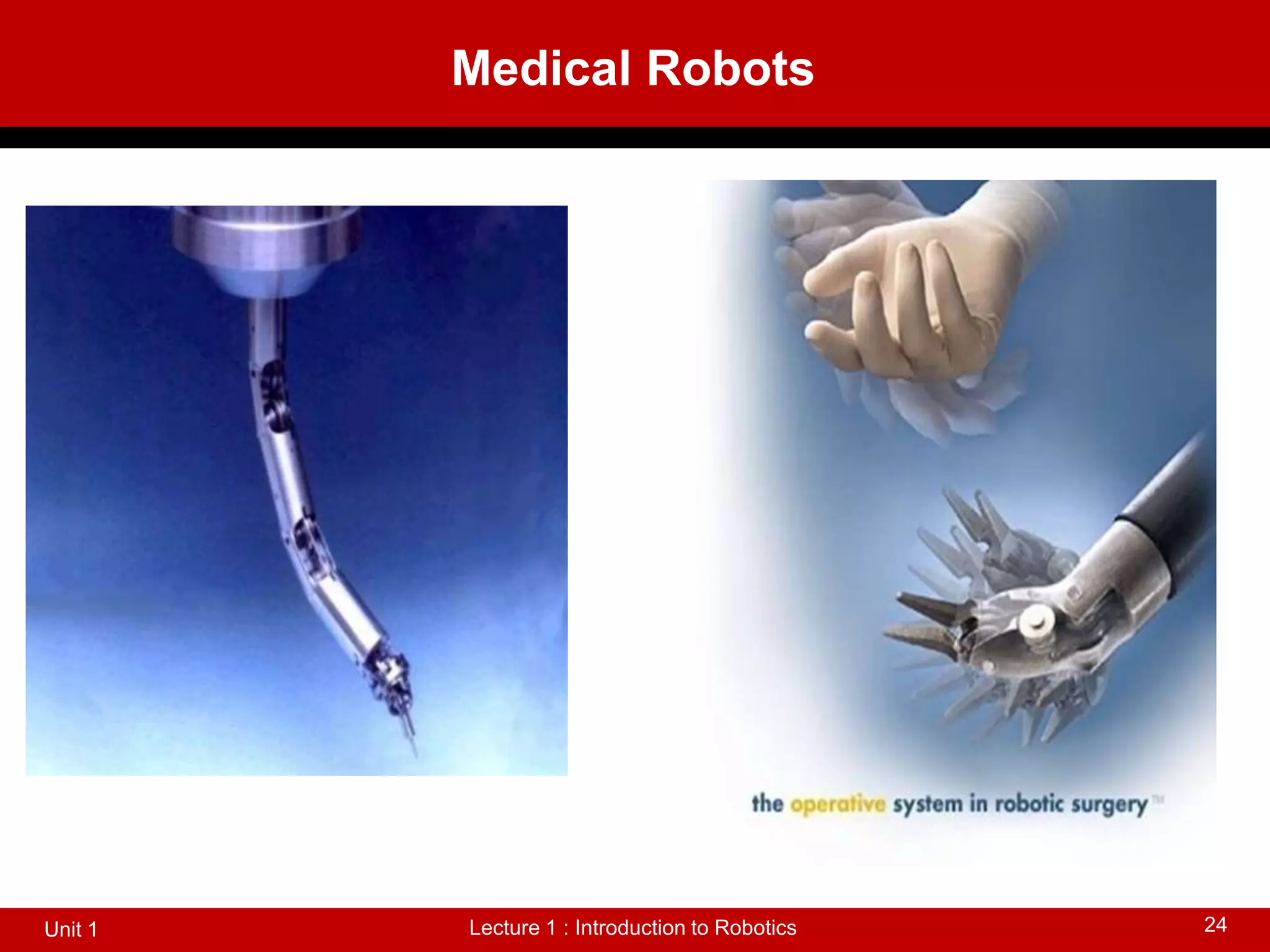
•Health care: hospitals, patient-care, surgery , research, etc.
•Laboratories: science, engineering , etc.
•Law enforcement: surveillance, patrol, etc.
•Manufacturing
•Military: demining, surveillance, attack, etc.
•Mining, excavation, and exploration
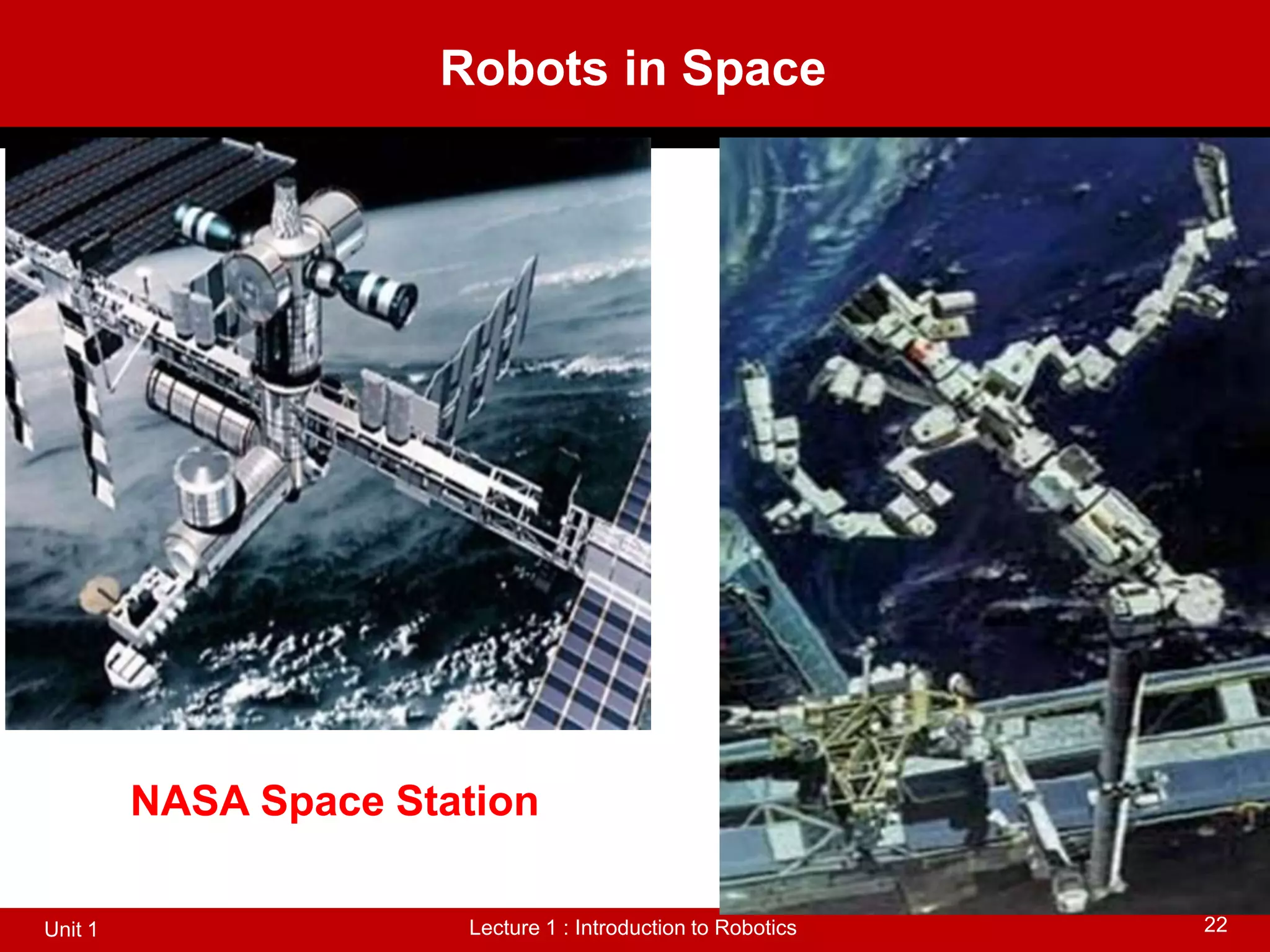
•Transportation: air, ground, rail, space, etc.
•Utilities: gas, water, and electric
•Warehouses
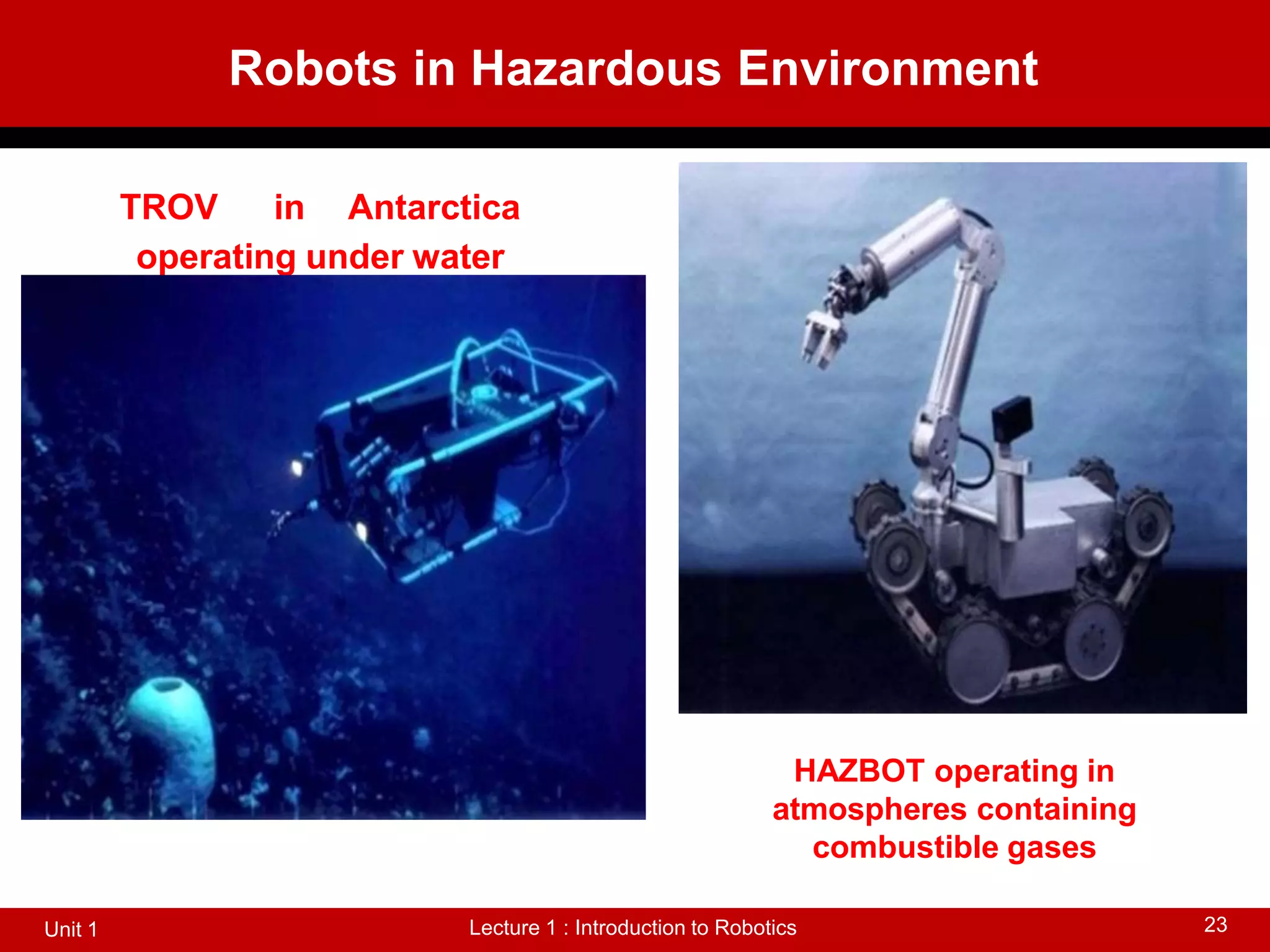
Robots in HazardousEnvironment
Lecture 1 : Introduction to Robotics
Unit 1 23
TROV in Antarctica
operating under water
HAZBOT operating in
atmospheres containing
combustible gases
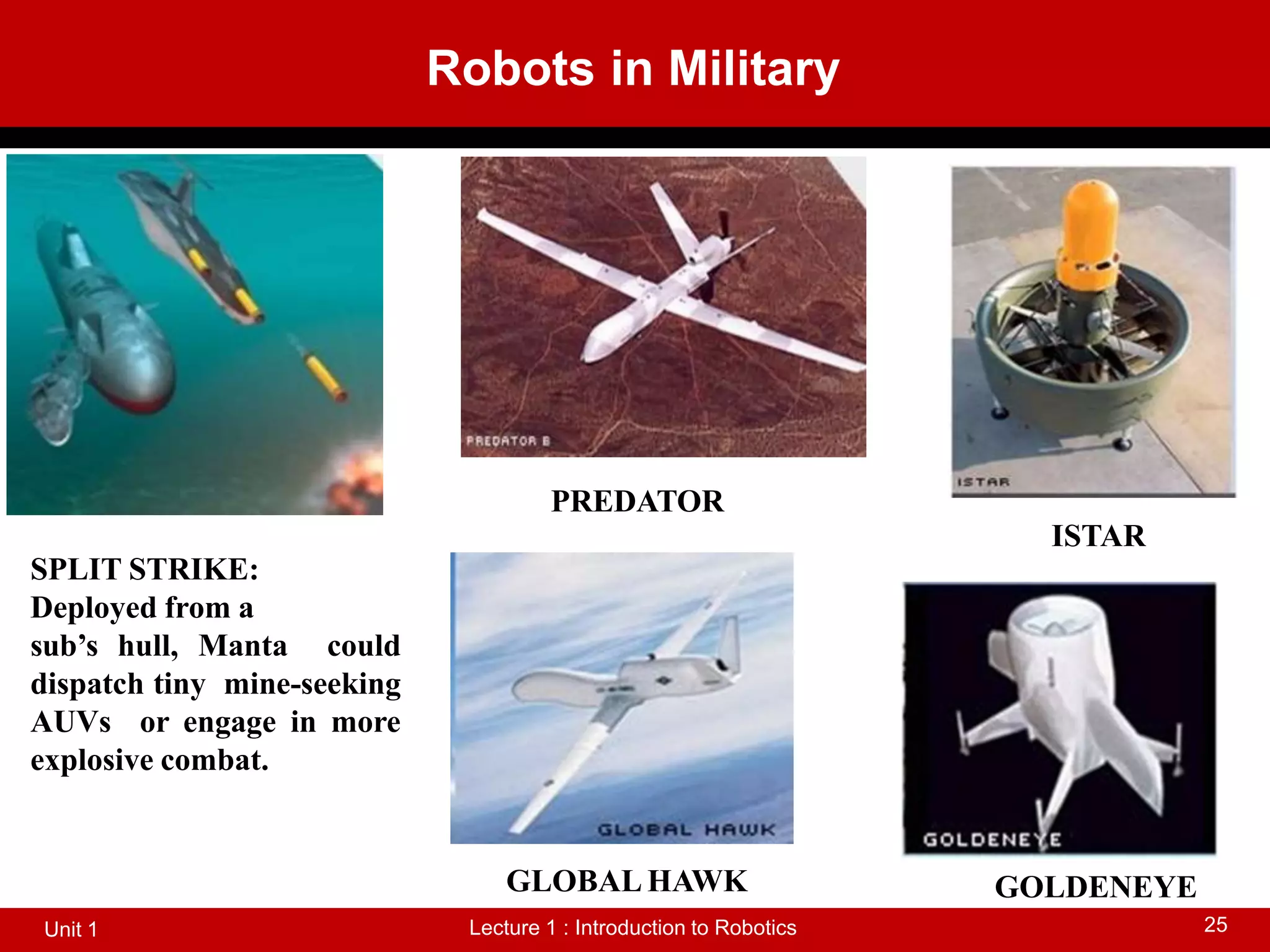
Robots in Military
Lecture1 : Introduction to Robotics
Unit 1 25
SPLIT STRIKE:
Deployed from a
sub’s hull, Manta could
dispatch tiny mine-seeking
AUVs or engage in more
explosive combat.
PREDATOR
ISTAR
GLOBAL HAWK GOLDENEYE
26.
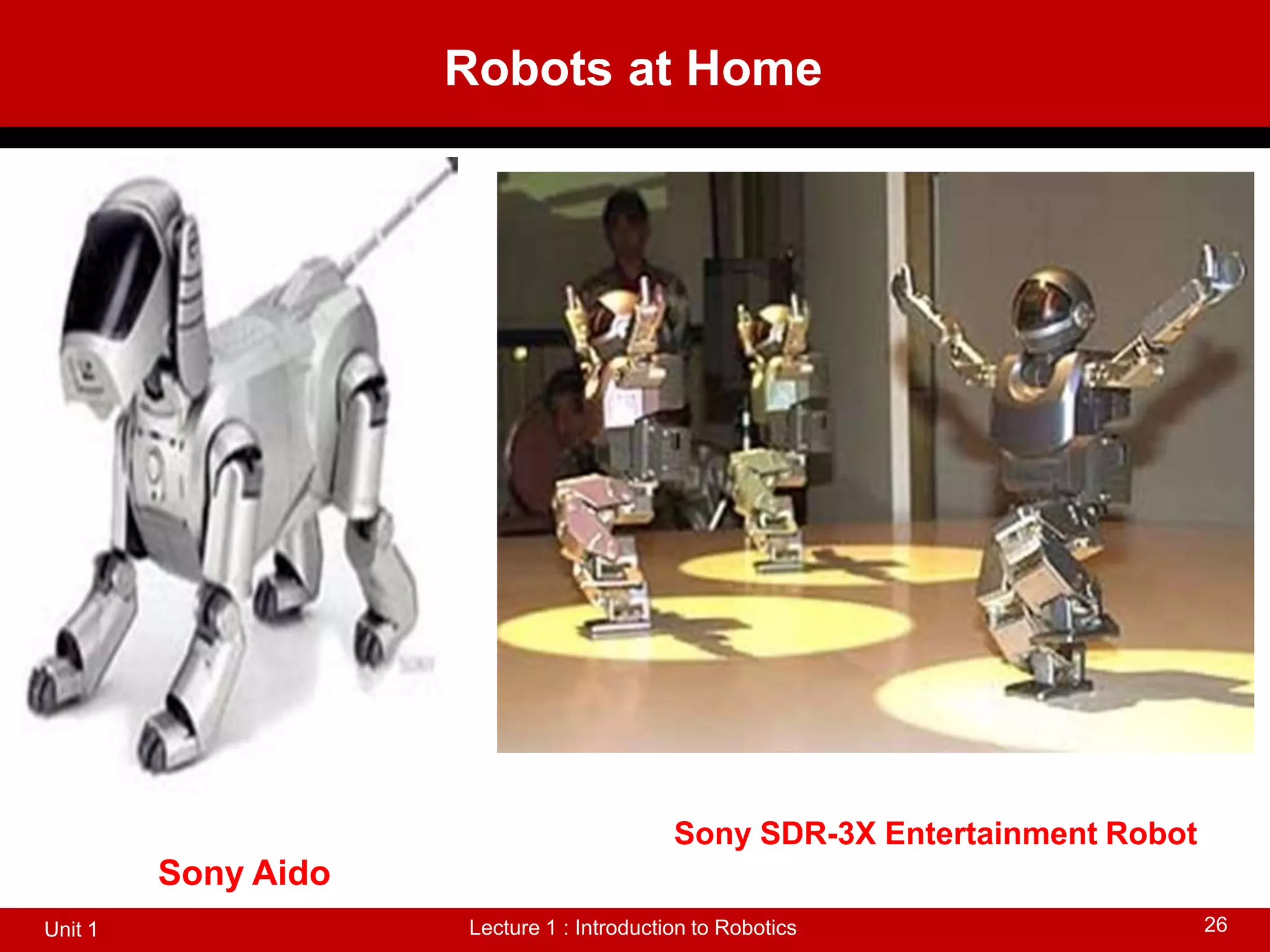
Robots at Home
Lecture1 : Introduction to Robotics
Unit 1 26
Sony Aido
Sony SDR-3X Entertainment Robot
27.
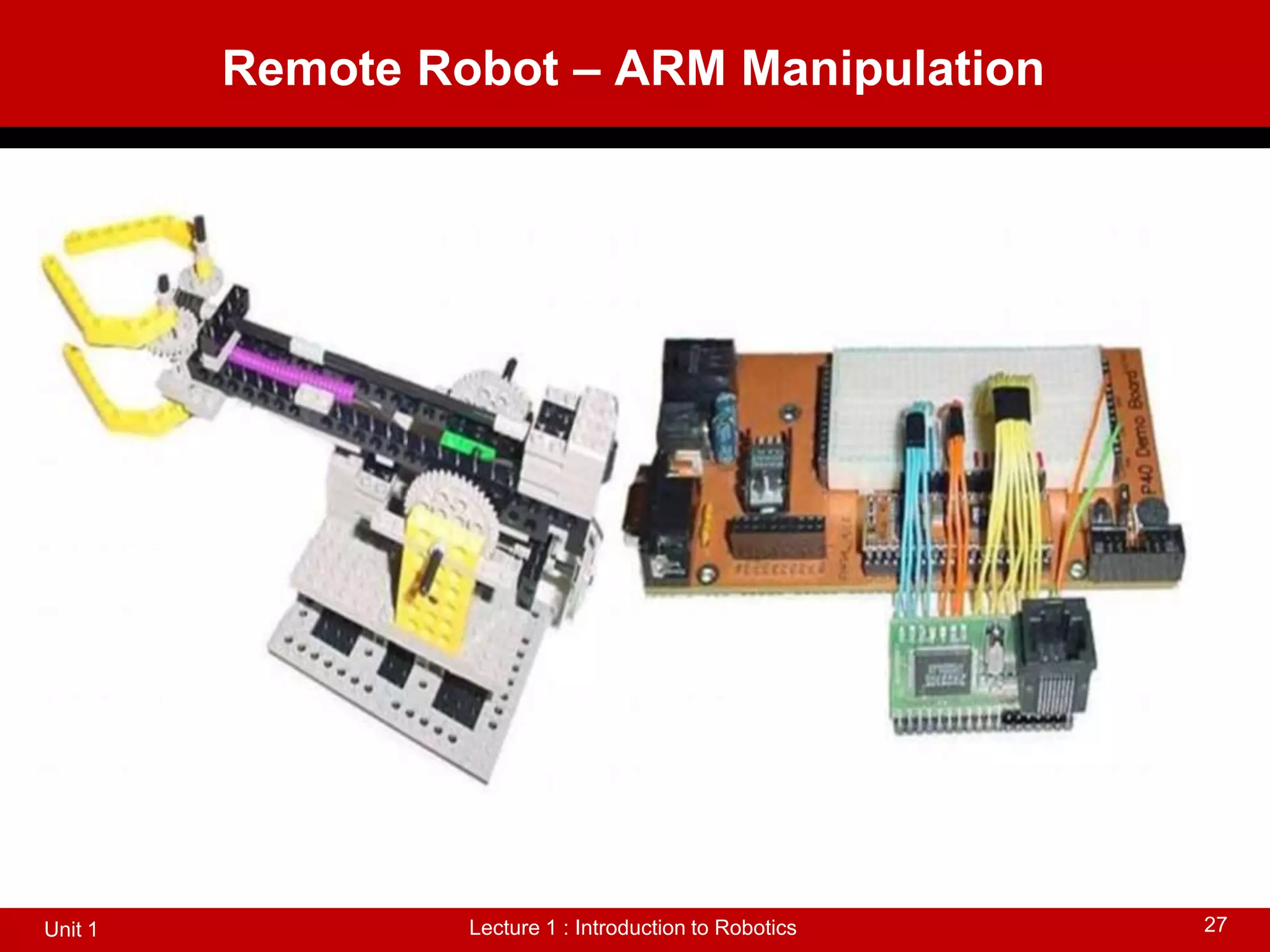
Remote Robot –ARM Manipulation
Lecture 1 : Introduction to Robotics
Unit 1 27
28.
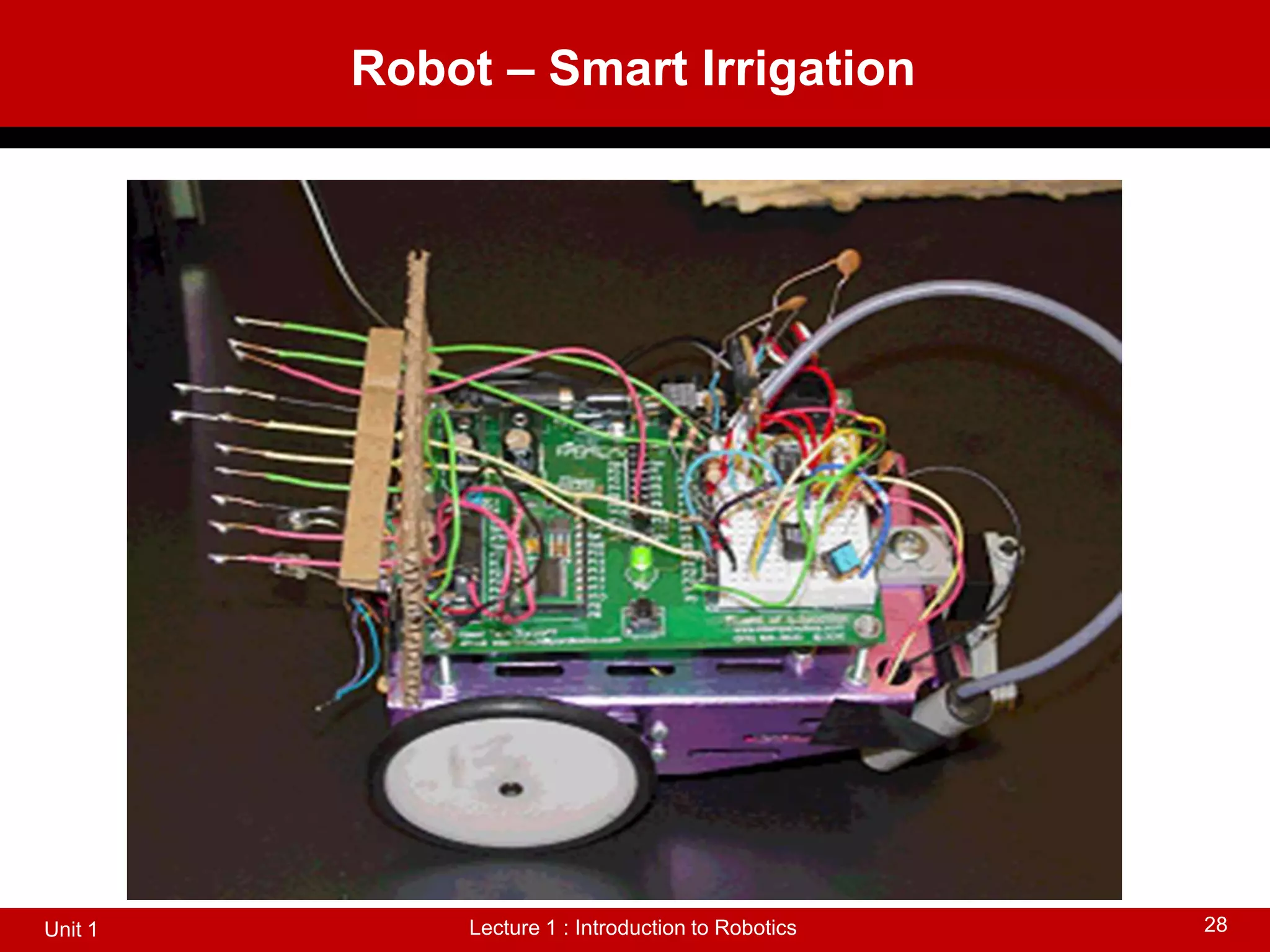
Robot – SmartIrrigation
Lecture 1 : Introduction to Robotics
Unit 1 28
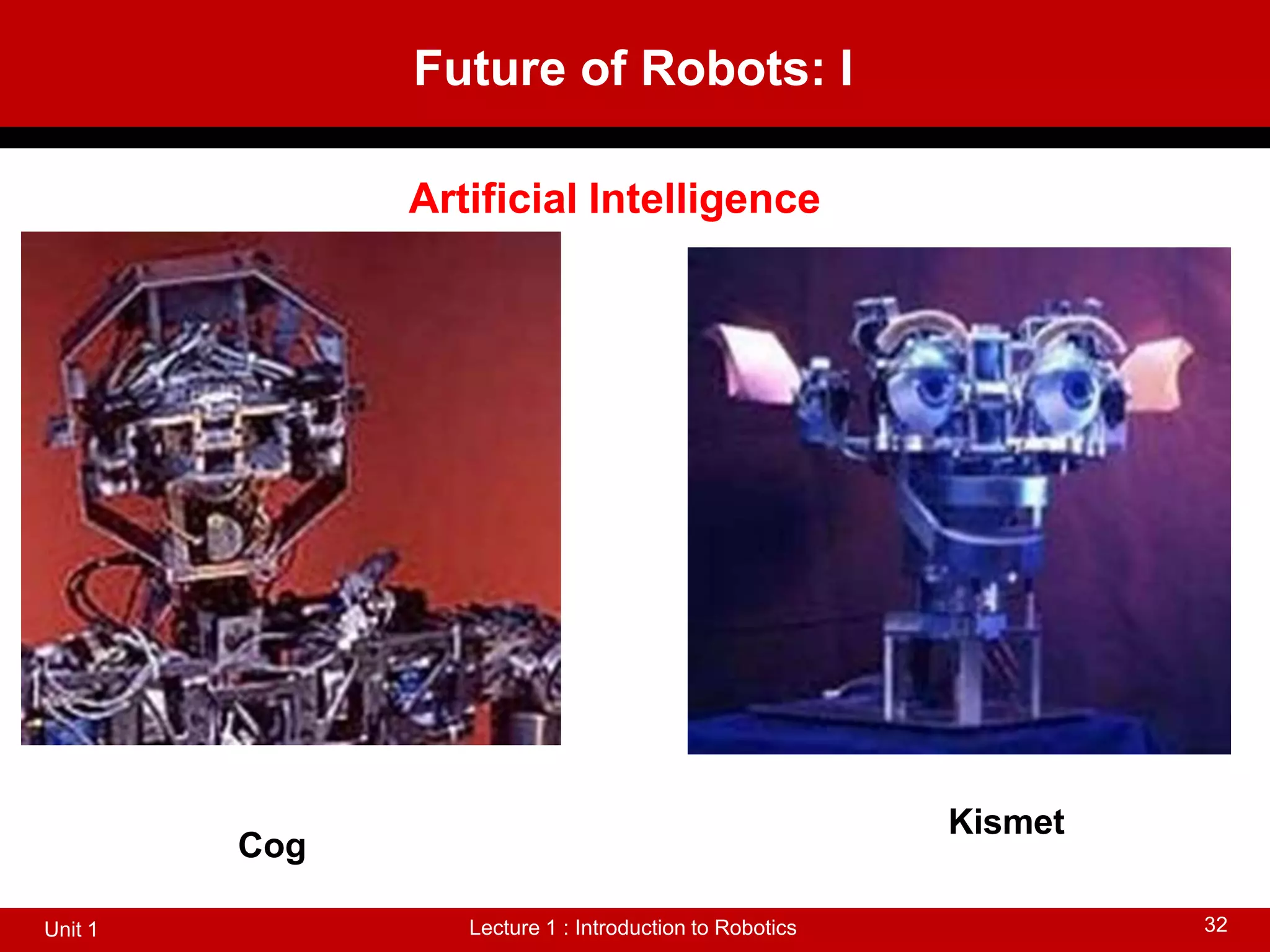
Future of Robots:I
Lecture 1 : Introduction to Robotics
Unit 1 32
Artificial Intelligence
Cog
Kismet
33.
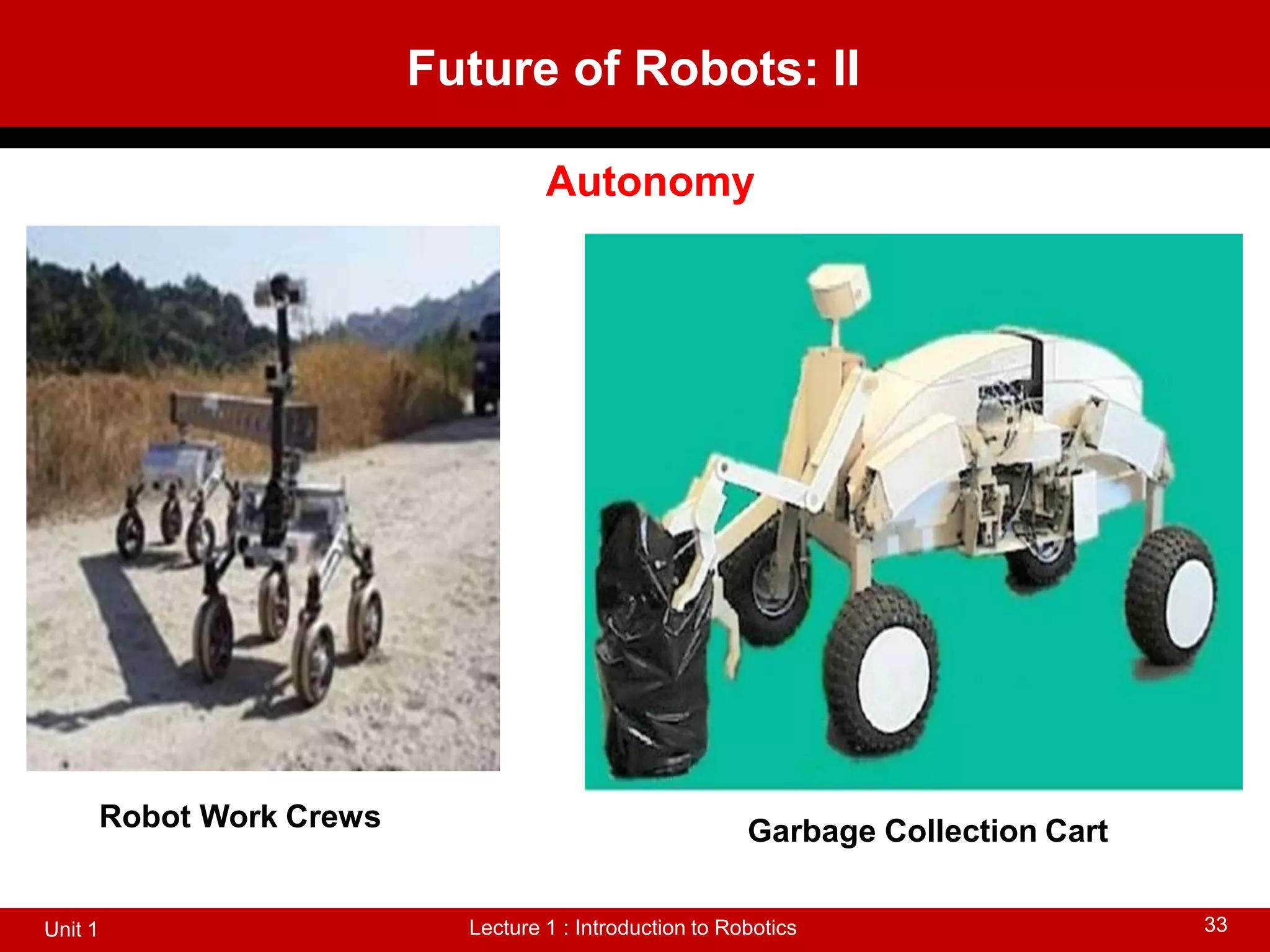
Future of Robots:II
Lecture 1 : Introduction to Robotics
Unit 1 33
Autonomy
Robot Work Crews Garbage Collection Cart
34.
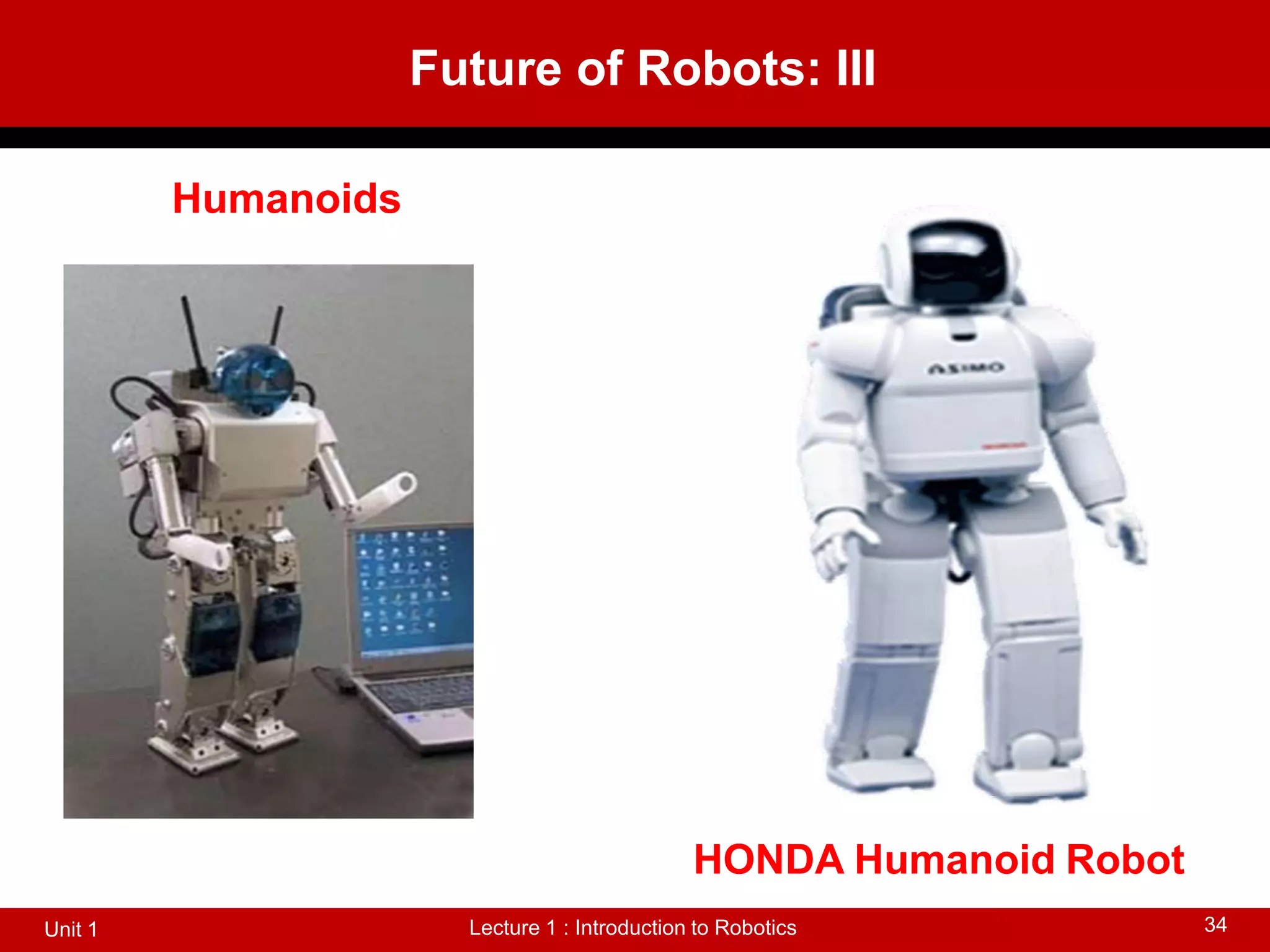
Future of Robots:III
Lecture 1 : Introduction to Robotics
Unit 1 34
Humanoids
HONDA Humanoid Robot
35.
Laws of Robotics
Lecture1 : Introduction to Robotics
Unit 1 35
A robot must not harm a human being, nor through inaction
allow one to come to harm.
A robot must always obey human beings, unless that is in
conflict with the 1st law.
A robot must protect from harm, unless that is in conflict
with the first two laws.
A robot may take a human being’s job but it may not leave that
person jobless. [Fuller(1999)]
36.
Laws of Robotics
Lecture1 : Introduction to Robotics
Unit 1 36
Asimov proposed three “Laws of Robotics” and later added
the “zeroth law”:
• Law 0:
A robot may not injure humanity or through inaction, allow
humanity to come to harm
• Law 1:
A robot may not injure a human being or through inaction, allow
a human being to come to harm, unless this would violate a
higher order law
37.
Laws of Robotics
Lecture1 : Introduction to Robotics
Unit 1 37
• Law 2:
A robot must obey orders given
to it by human beings, except
where such orders would conflict
with a higher order law
• Law 3:
A robot must protect its own
existence as long as such
protection does not conflict with a
higher order law
38.
Traditional Industrial Robots
Lecture1 : Introduction to Robotics
Unit 1 38
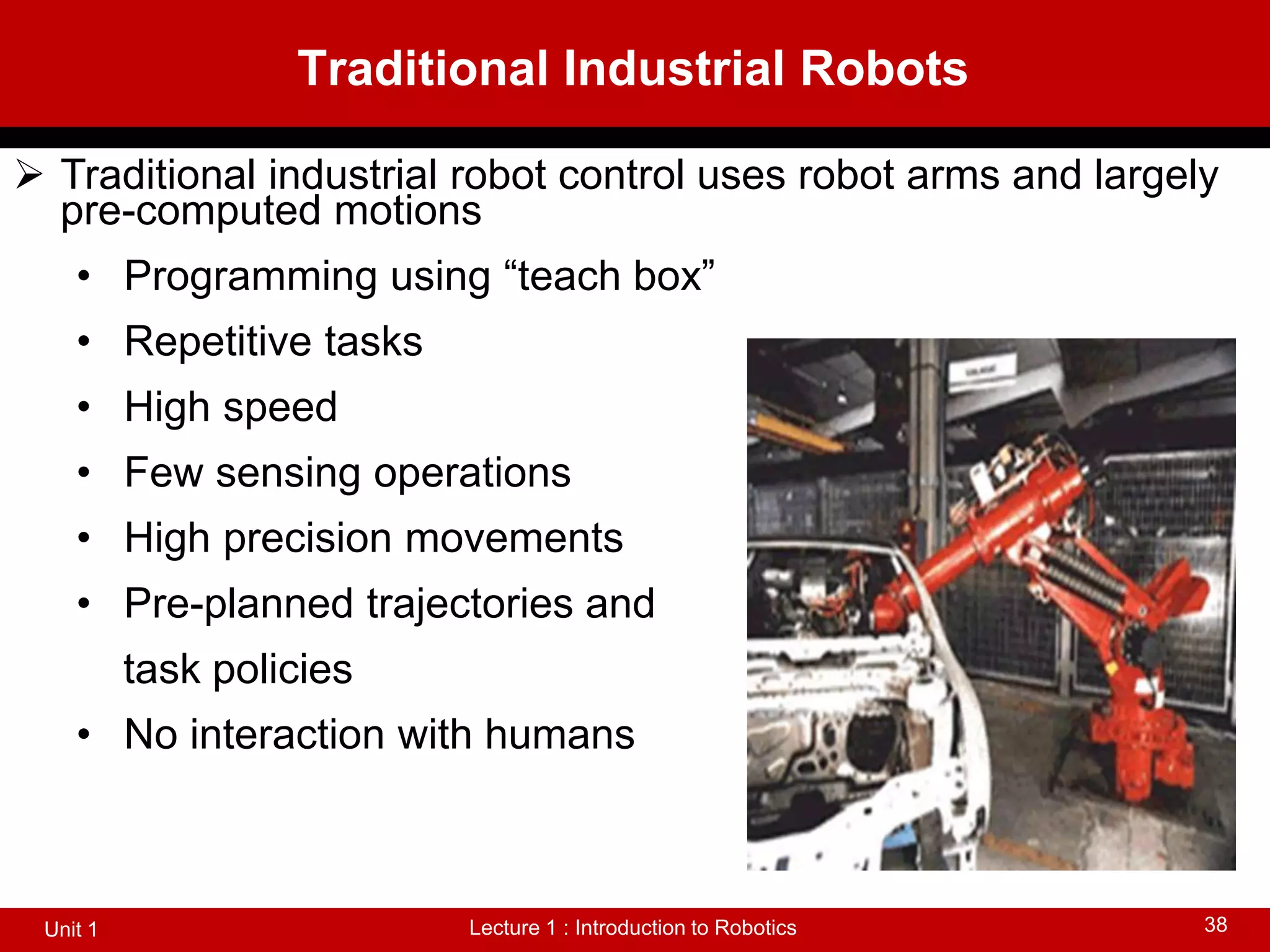
Traditional industrial robot control uses robot arms and largely
pre-computed motions
• Programming using “teach box”
• Repetitive tasks
• High speed
• Few sensing operations
• High precision movements
• Pre-planned trajectories and
task policies
• No interaction with humans
39.
Introduction to Robotics
Lecture1 : Introduction to Robotics
Unit 1 39
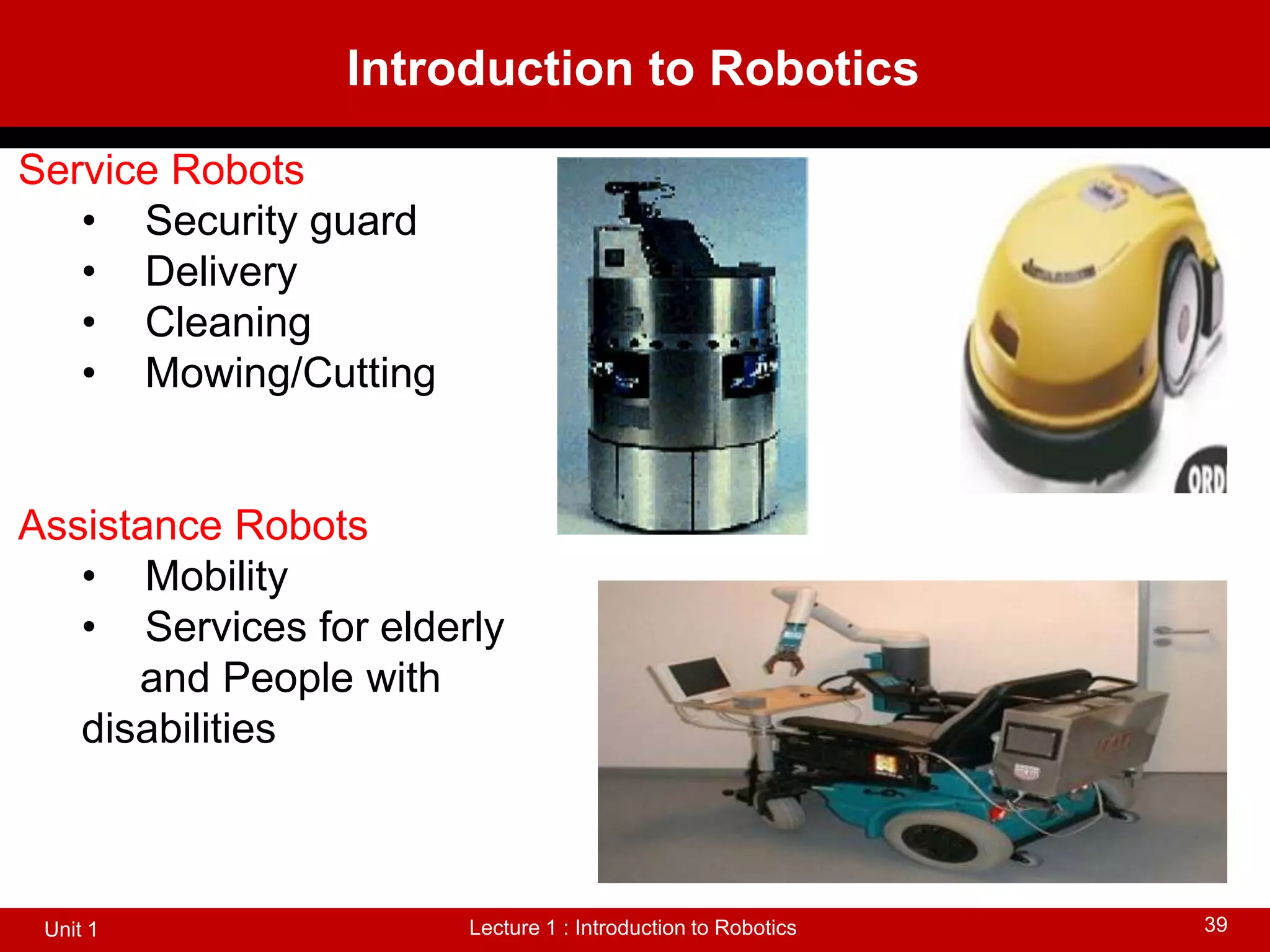
Service Robots
• Security guard
• Delivery
• Cleaning
• Mowing/Cutting
Assistance Robots
• Mobility
• Services for elderly
and People with
disabilities
40.
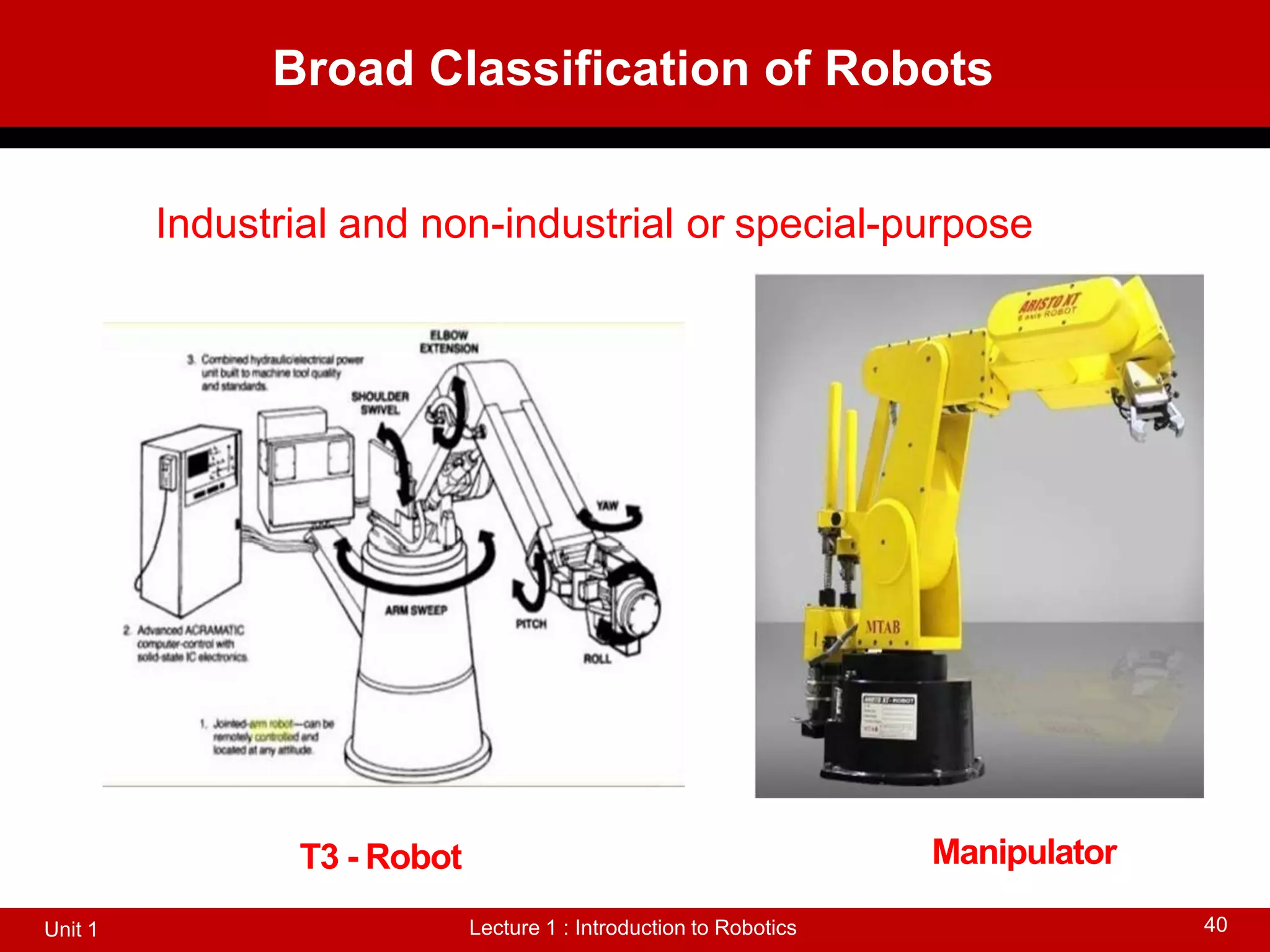
Broad Classification ofRobots
Lecture 1 : Introduction to Robotics
Unit 1 40
T3 - Robot Manipulator
Industrial and non-industrial or special-purpose
41.
Special Purpose Robots
Lecture1 : Introduction to Robotics
Unit 1 41
Automatic GuidedVehicles
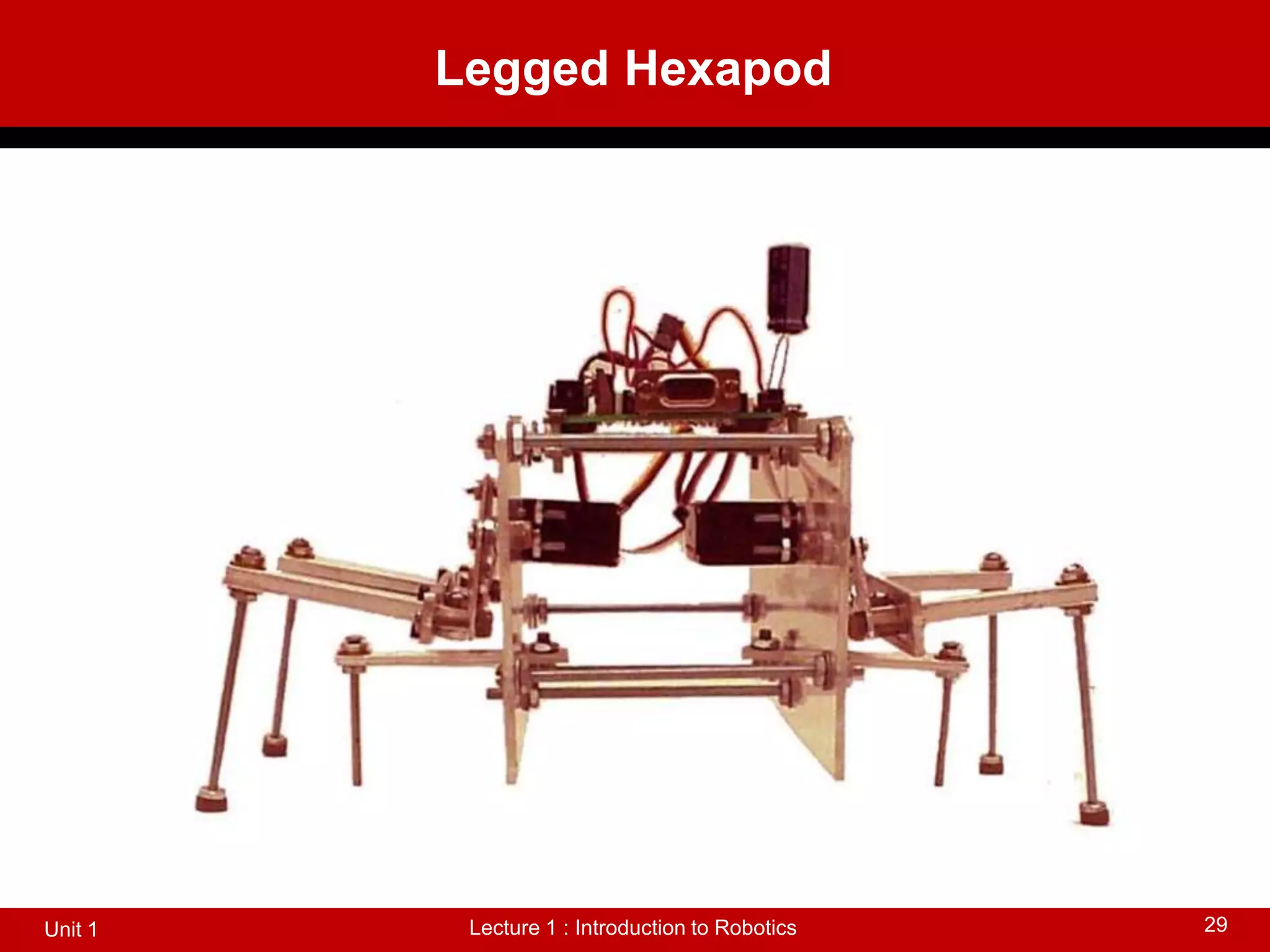
Walking Robots
Parallel Robots
42.
Automatic GuidedVehicles
Lecture 1: Introduction to Robotics
Unit 1 42
• These are used in factories for material handling purposes
• Omni directional Wheel - omni directional wheels give two degree
of freedom to moveAGVin sideways.
• AGVs can also used in hospital for nursing, security, and other
applictions.
43.
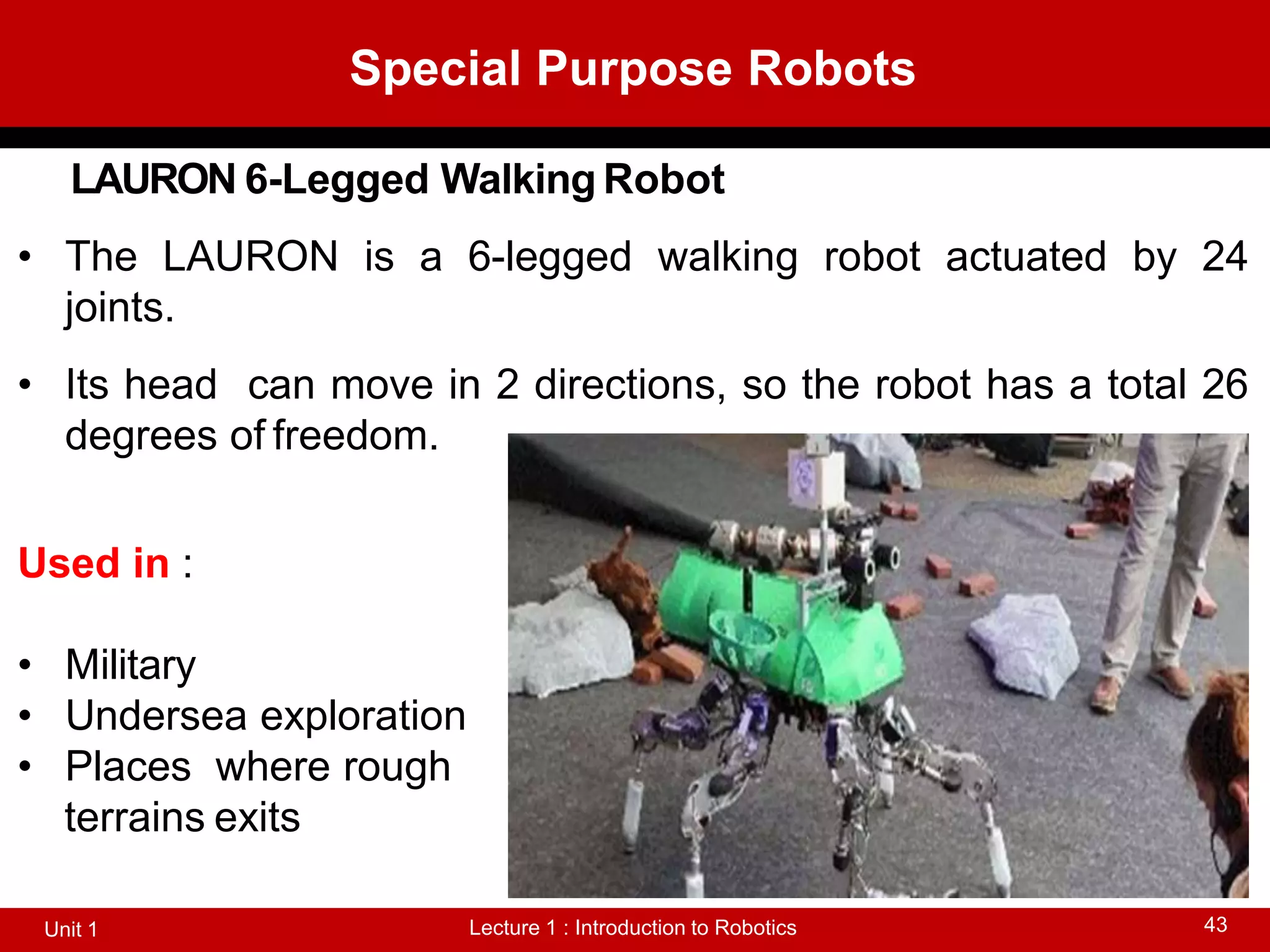
Special Purpose Robots
Lecture1 : Introduction to Robotics
Unit 1 43
LAURON 6-Legged Walking Robot
• The LAURON is a 6-legged walking robot actuated by 24
joints.
• Its head can move in 2 directions, so the robot has a total 26
degrees of freedom.
Used in :
• Military
• Undersea exploration
• Places where rough
terrains exits
44.
Parallel Robots
Lecture 1: Introduction to Robotics
Unit 1 44
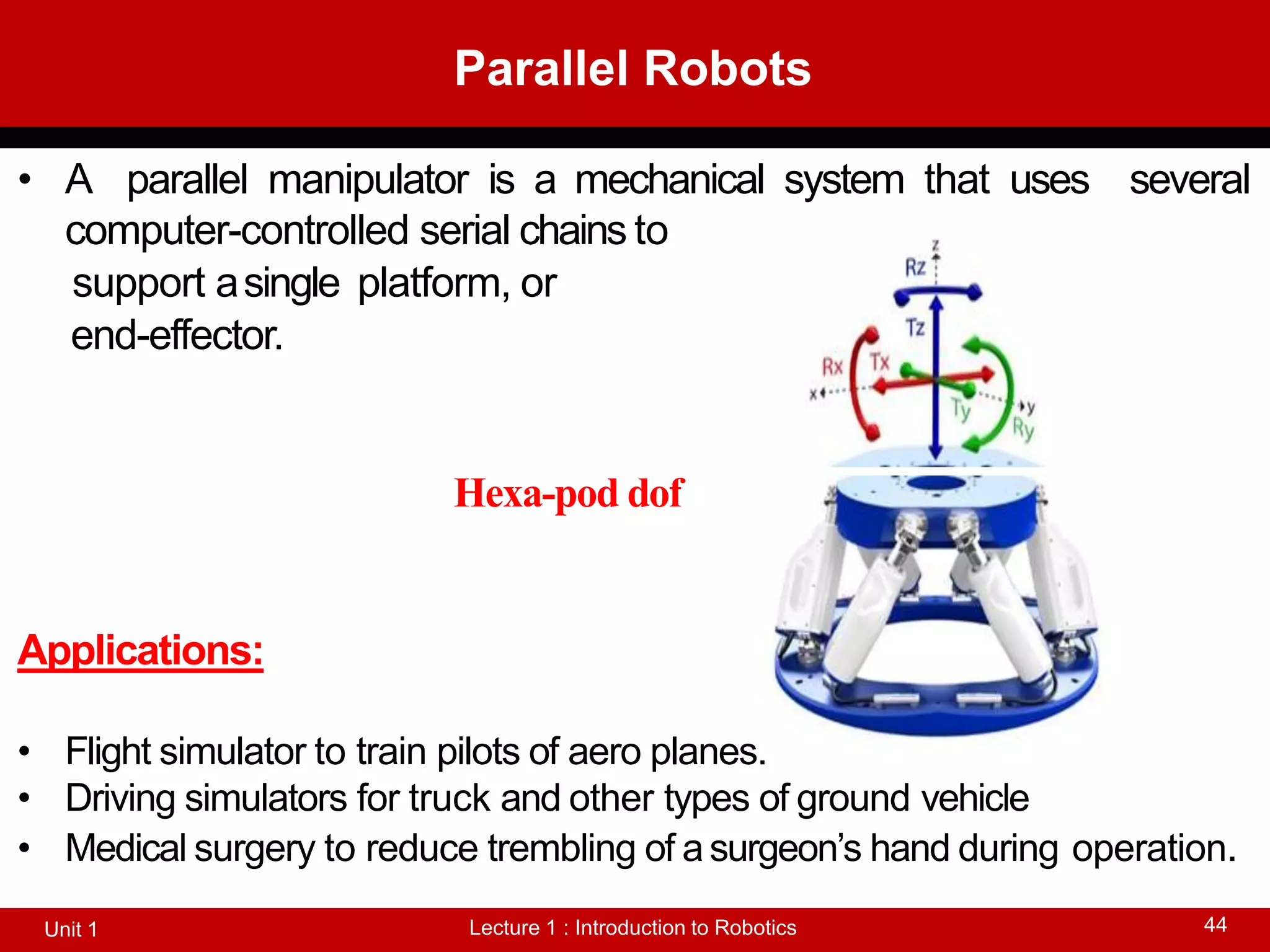
• A parallel manipulator is a mechanical system that uses several
computer-controlled serial chains to
support asingle platform, or
end-effector.
Hexa-pod dof
Applications:
• Flight simulator to train pilots of aero planes.
• Driving simulators for truck and other types of ground vehicle
• Medical surgery to reduce trembling of asurgeon’s hand during operation.
45.
Uses of Robots
Lecture1 : Introduction to Robotics
Unit 1 45
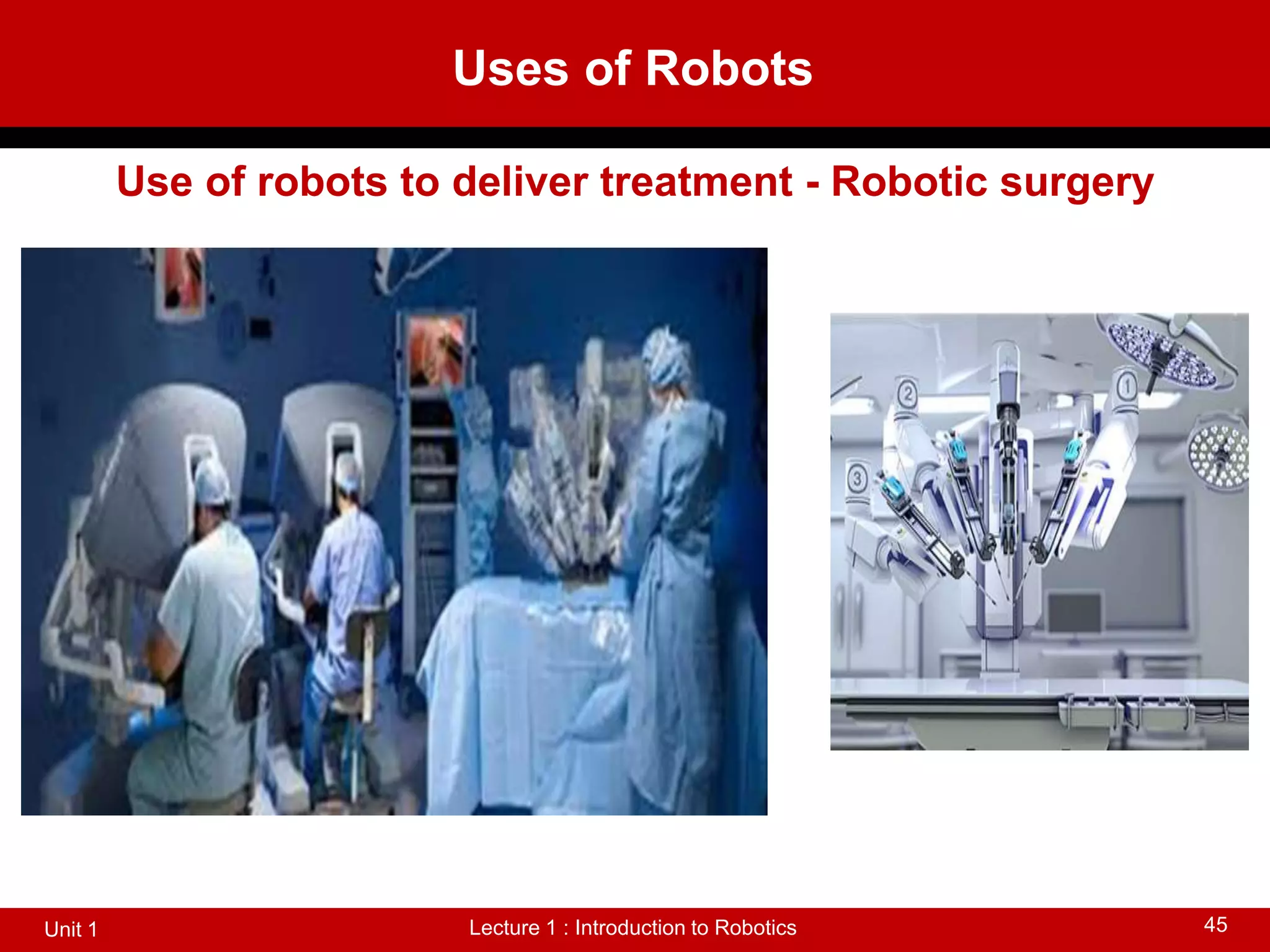
Use of robots to deliver treatment - Robotic surgery
46.
Uses of Robots
Lecture1 : Introduction to Robotics
Unit 1 46
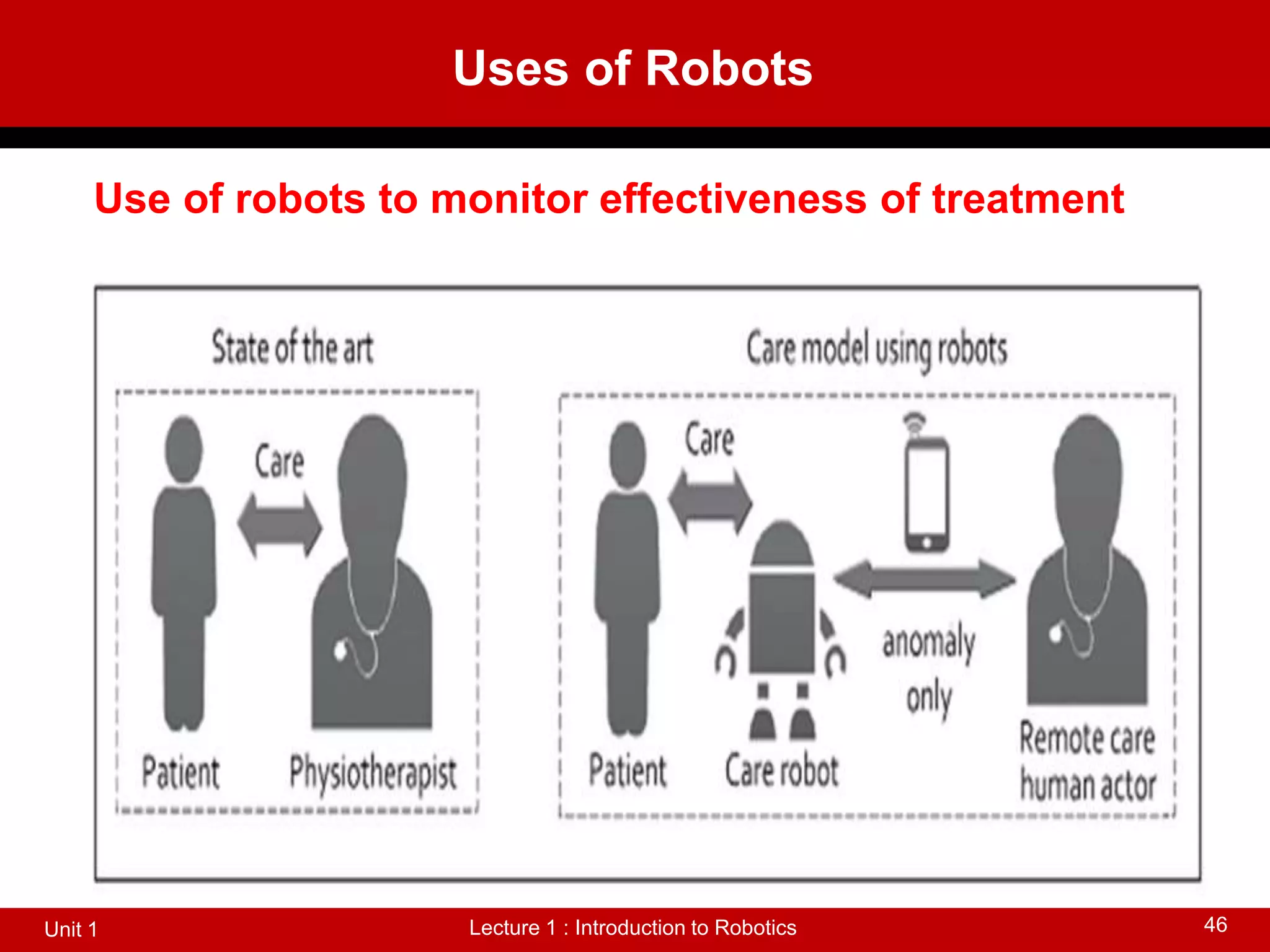
Use of robots to monitor effectiveness of treatment
47.
Thumb rules onthe decision of a robot usage
Lecture 1 : Introduction to Robotics
Unit 1 47
Four Dsof Robotics: i.e. isthe task dirty, dull, dangerous, or difficult?
Robot maynot leaveahuman jobless.
Involves asking whether you can find people who are willing to do the
job. Ifnot, the job isacandidate for automation or robotics.
Robots and automation must make short-term and long-term
economic sense.
48.
KUKA - Roboticsspot welding
Lecture 1 : Introduction to Robotics
Unit 1 48
49.
KUKA - Roboticsspot welding
Lecture 1 : Introduction to Robotics
Unit 1 49
50.
Robotics - Summary
Lecture1 : Introduction to Robotics
Unit 1 50
• Word robot was coined by a Czech novelist Karel Capek in a 1920
play titled Rassum’s Universal Robots (RUR)
• Robot in Czech is a word for worker or servant
Definition of robot:
• Any machine made by by one our members:
Robot Institute of America
• A robot is a reprogrammable, multifunctional manipulator
designed to move material, parts, tools or specialized devices
through variable programmed motions for the performance of
a variety of tasks:
• Robot Institute of America, 1979.
Karel Capek
![Laws of Robotics
Lecture 1 : Introduction to Robotics
Unit 1 35
A robot must not harm a human being, nor through inaction
allow one to come to harm.
A robot must always obey human beings, unless that is in
conflict with the 1st law.
A robot must protect from harm, unless that is in conflict
with the first two laws.
A robot may take a human being’s job but it may not leave that
person jobless. [Fuller(1999)]](https://image.slidesharecdn.com/lecture1-introductiontorobotics-230221045202-4881d387/75/Lecture-1-Introduction-to-Robotics-pptx-35-2048.jpg)