1. The document discusses BIBO (bounded-input bounded-output) stability of systems with poles on the imaginary axis.
2. It analyzes two systems (S1 and S2) and finds that their outputs are bounded for all inputs except sinusoidal inputs with frequencies equal to the poles' magnitudes, making them marginally/critically stable by some definitions but unstable by strict BIBO definitions.
3. It establishes four conditions for BIBO stability: all poles must be in the left half plane (LHP), no right half plane (RHP) poles, no repeating imaginary axis poles, and non-repeating imaginary axis poles make a system unstable or critically stable.

![𝑌( 𝑠) = 𝑃( 𝑠) 𝑈( 𝑠) =
1
𝑠2 + 1
𝑠
𝑠2 + 1
=
𝑠
(𝑠2 + 1)2
Now, we use a property of Laplace transform, the complex differentiation theorem.
𝐿[ 𝑡𝑓( 𝑡)] = −
𝑑𝐹(𝑠)
𝑑𝑠
Let us take 𝑓( 𝑡) = sin 𝑡,
𝐹( 𝑠) =
1
𝑠2 + 1
−
𝑑𝐹( 𝑠)
𝑑𝑠
=
2𝑠
( 𝑠2 + 1)2
,
𝑦( 𝑡) =
1
2
𝑡 sin 𝑡
We can observe that, as 𝑡 → ∞, 𝑦( 𝑡) → ∞.
(Refer Slide Time: 05:22)
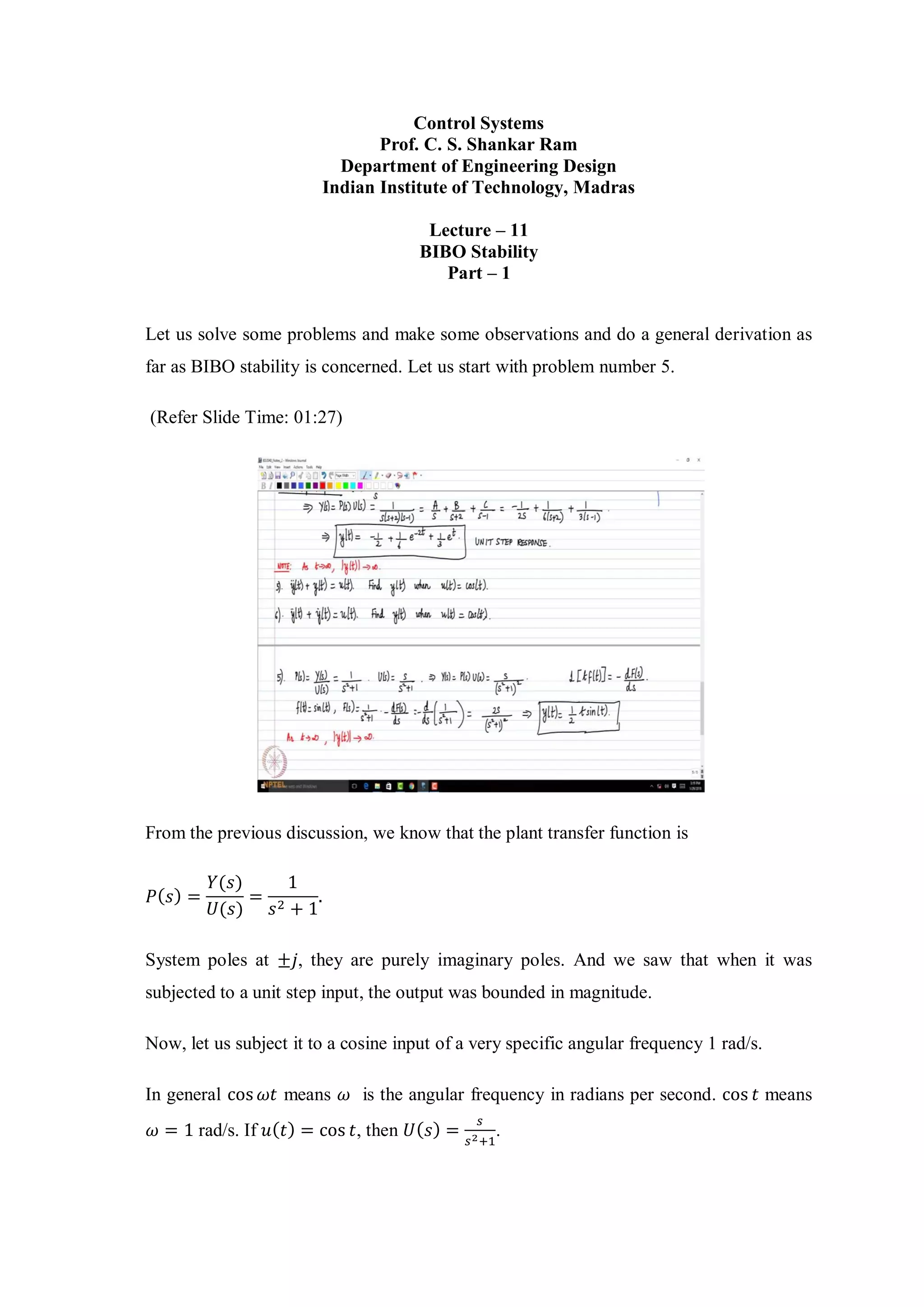
Now, let us solve problem number 6. We already know that the plant transfer function is
𝑃( 𝑠) =
𝑌(𝑠)
𝑈(𝑠)
=
1
𝑠2+𝑠
=
1
𝑠(𝑠+1)
.
𝑢( 𝑡) = cos 𝑡, then 𝑈( 𝑠) =
𝑠
𝑠2+1
.](https://image.slidesharecdn.com/lec11-200324130804/85/Lec11-2-320.jpg)