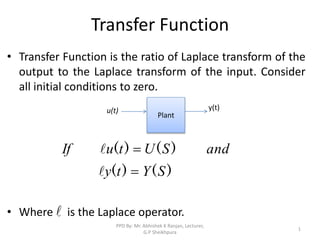
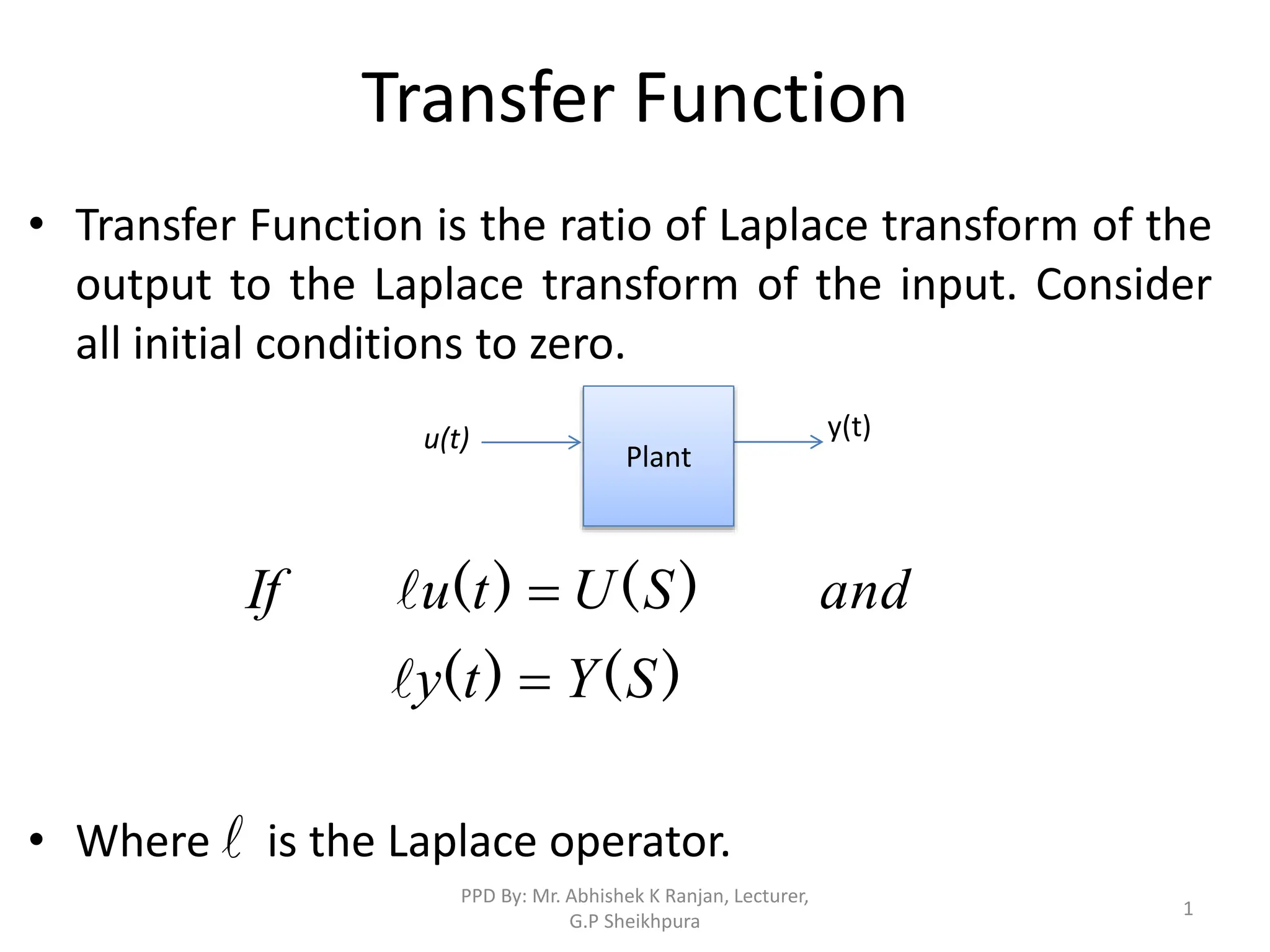
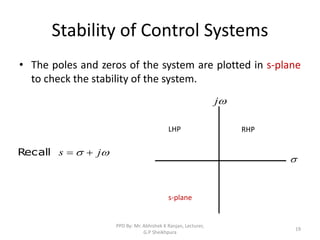
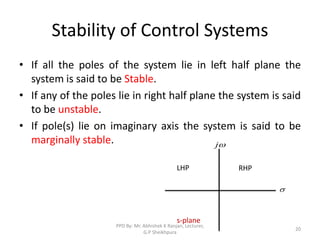
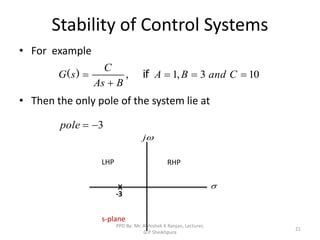
The document discusses transfer functions, which relate the Laplace transform of the output of a system to the Laplace transform of the input. It defines poles and zeros, and explains that stability is determined by whether the poles lie in the left or right half of the s-plane. It also discusses the BIBO definition of stability, where a system is stable if bounded inputs produce bounded outputs.
![Calculation of the Transfer Function
dt
t
dx
B
dt
t
dy
C
dt
t
x
d
A
)
(
)
(
)
(
2
2
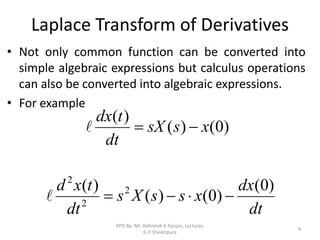
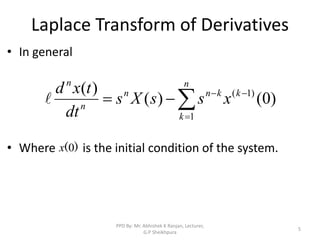
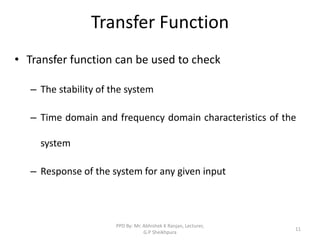
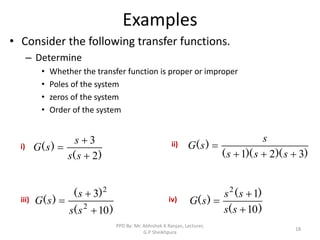
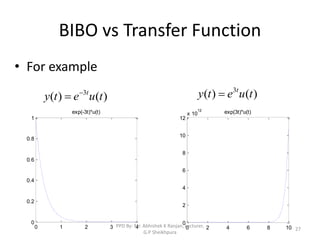
• Consider the following ODE where y(t) is input of the system and
x(t) is the output.
• or
• Taking the Laplace transform on either sides
)
(
'
)
(
'
)
(
'
' t
Bx
t
Cy
t
Ax
)]
(
)
(
[
)]
(
)
(
[
)]
(
'
)
(
)
(
[ 0
0
0
0
2
x
s
sX
B
y
s
sY
C
x
sx
s
X
s
A
7
PPD By: Mr. Abhishek K Ranjan, Lecturer,
G.P Sheikhpura](https://image.slidesharecdn.com/fundamentalsoftransferfunction-240215034951-5b4af377/85/Fundamentals-of-Transfer-Function-in-control-system-pptx-7-320.jpg)
![Calculation of the Transfer Function
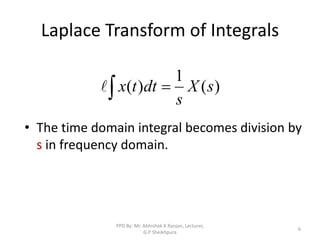
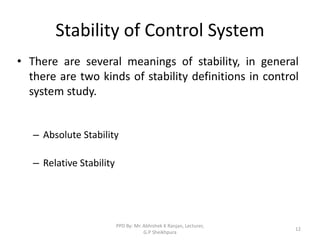
• Considering Initial conditions to zero in order to find the transfer
function of the system
• Rearranging the above equation
)]
(
)
(
[
)]
(
)
(
[
)]
(
'
)
(
)
(
[ 0
0
0
0
2
x
s
sX
B
y
s
sY
C
x
sx
s
X
s
A
)
(
)
(
)
( s
BsX
s
CsY
s
X
As
2
)
(
]
)[
(
)
(
)
(
)
(
s
CsY
Bs
As
s
X
s
CsY
s
BsX
s
X
As
2
2
B
As
C
Bs
As
Cs
s
Y
s
X
2
)
(
)
(
8
PPD By: Mr. Abhishek K Ranjan, Lecturer,
G.P Sheikhpura](https://image.slidesharecdn.com/fundamentalsoftransferfunction-240215034951-5b4af377/85/Fundamentals-of-Transfer-Function-in-control-system-pptx-8-320.jpg)




































![Circuit Network Analysis - [Chapter5] Transfer function, frequency response, ...](https://cdn.slidesharecdn.com/ss_thumbnails/ch5-150613063859-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)




























