Download as PDF, PPTX










![System Representation Languages
Petri Net
It is a low level
language that used to
model and to simulate
discrete-event and
continuous-time
systems, It consists only
of tow predefined-
blocks [Place and
Transition], which are
enough to represent
very complex systems.
For example:](https://image.slidesharecdn.com/seminar-130426083428-phpapp01/85/Master-Thesis-Presentation-13-320.jpg)

















![4. New Matrix Based Language
Power Matrix Script
Specification
Language with all structured languages features
Global variables, variables, constants
Control statement [If, for, while, switch]
Functions, subroutines
Support recursive calling
Variables and Constants are matrices or vectors
Support all matrix operations](https://image.slidesharecdn.com/seminar-130426083428-phpapp01/85/Master-Thesis-Presentation-32-320.jpg)
![4. New Matrix Based Language
Power Matrix Script
Feature
Support 9 data types [all C data types + complex],
this feature doesn't supported by Matlab script
Perform automatic data conversion
Function support any number of input and output
arguments
High Error protection against user mistakes
Libraries can be extended by functions and
subroutines and exported C functions
Automatically detect libraries
Integrated with the simulator
Encapsulated within single object](https://image.slidesharecdn.com/seminar-130426083428-phpapp01/85/Master-Thesis-Presentation-33-320.jpg)








![CAD Tool
Detail tool structure
element i sub-system j
Schematic Editor
System
Simulator
Power-Matrix Script Interpreter
Libraries Viewer Object Inspector
Value1P1
P2 Value2
… ...
Loaded
Libraries
Lib1 Lib2 Lib n
Library
Element
Definition
Environment Variables
Definition
Environment
Variables
Runtime Variables
Control CenterCommand Line Interpreter
Syntax/Script Editor
A = [1 2 3]
B= C + D
IF(A>PI/2)
B=C+D;
END;
A
Others](https://image.slidesharecdn.com/seminar-130426083428-phpapp01/85/Master-Thesis-Presentation-43-320.jpg)



















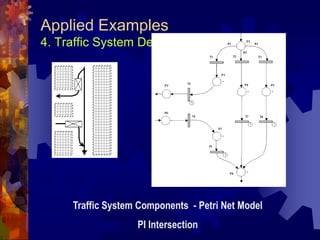




![Applied Examples
4. Traffic System Design Using Petri-Nets
Results
Input car generators [T=10,W=1] for each road
Simulation Time: 10000 second
Results:
Model 1 Model 2
Average Queue Length 3.067 0.1748
Average System Capacity 61.77 15.5
Case Study 1: Low Traffic
Input car generators [T=2,W=1] for each road
Simulation Time: 10000 second
Results:
Model 1 Model 2
Average Queue Length 466 0.8722
Average System Capacity 7500 77.9308
Case Study 2: Heavy Traffic](https://image.slidesharecdn.com/seminar-130426083428-phpapp01/85/Master-Thesis-Presentation-69-320.jpg)
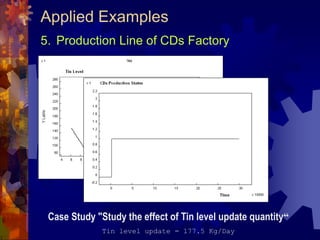
![Applied Examples
5. Production Line of CDs Factory
• Factory contains following production lines
• [Disk, Upper Cover, Down Cover, Holder ] Lines
• Assembly and Covering Line produce complete CD
• Packaging into small Boxes Line
• Packaging into Large Cartons Line
• Lines separated by buffers
• Input martial [Plastic Powder, Tin , Plastic Cover, Labels,
Small Boxes, Large Cartons] is stored in input buffers](https://image.slidesharecdn.com/seminar-130426083428-phpapp01/85/Master-Thesis-Presentation-70-320.jpg)









![Related Tools
GPSS-World
Simulator supports only standard GPSS language
Standard
Very fast simulation
Based on command mode interface [not visual]
Supported programming language is very week
Simulation Output in text format, no graphs, no
direct analysis can be applied
Advantage
Disadvantage](https://image.slidesharecdn.com/seminar-130426083428-phpapp01/85/Master-Thesis-Presentation-81-320.jpg)









This document summarizes an integrated control system design tool that was developed to analyze and design intelligent control systems. The tool allows users to: - Build interactive CAD models for control system design - Incorporate various libraries and integrate popular AI techniques - Simulate systems using mixed continuous/discrete event simulation - Represent systems with generalized Petri net and fuzzy system models - Program using a new matrix-based language - Model dead time elements flexibly - Apply the tool to examples like adaptive fuzzy PID control and liquid level control The document outlines the goals, background, achievements, related tools, and plans for future work regarding the development of the integrated intelligent control system design tool.