Downloaded 75 times
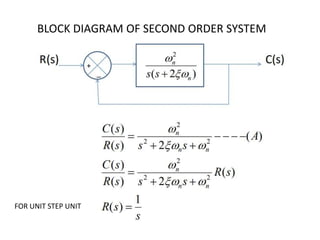
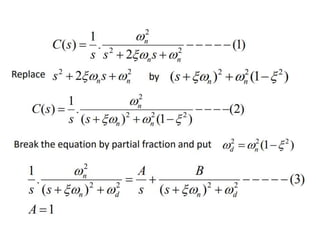
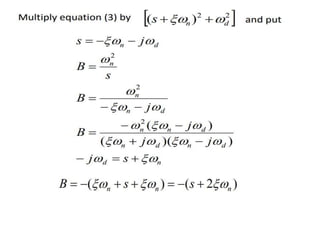
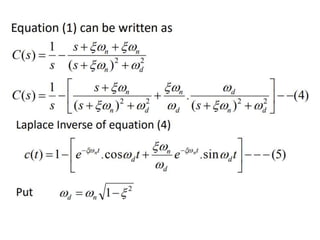




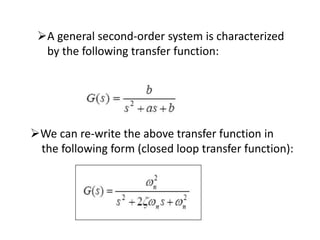


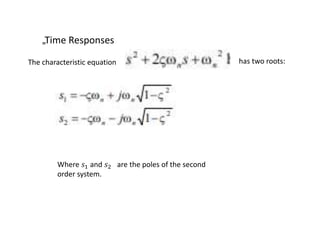
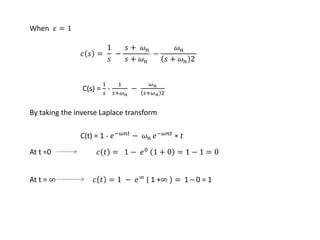

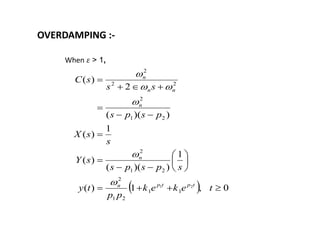
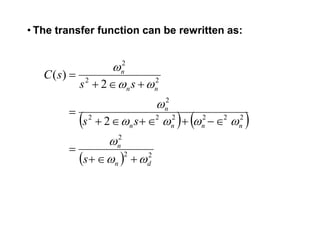
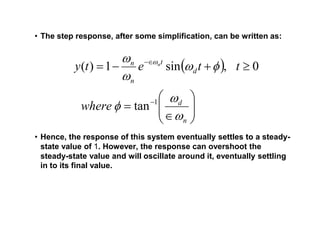

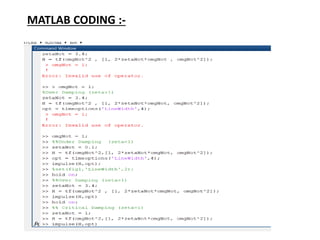
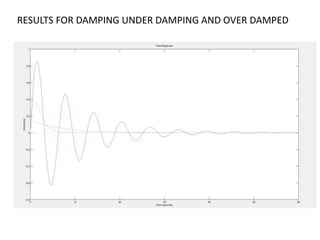


The document is a case study on the impulse response of second order systems in electrical engineering, focusing on characteristics like damping ratio and different categories of damping. It discusses the mathematical representation of second order systems, their impulse responses, and resulting behaviors under varying conditions. Additionally, it references MATLAB coding to analyze damping, along with various academic sources for further reading.