Download to read offline
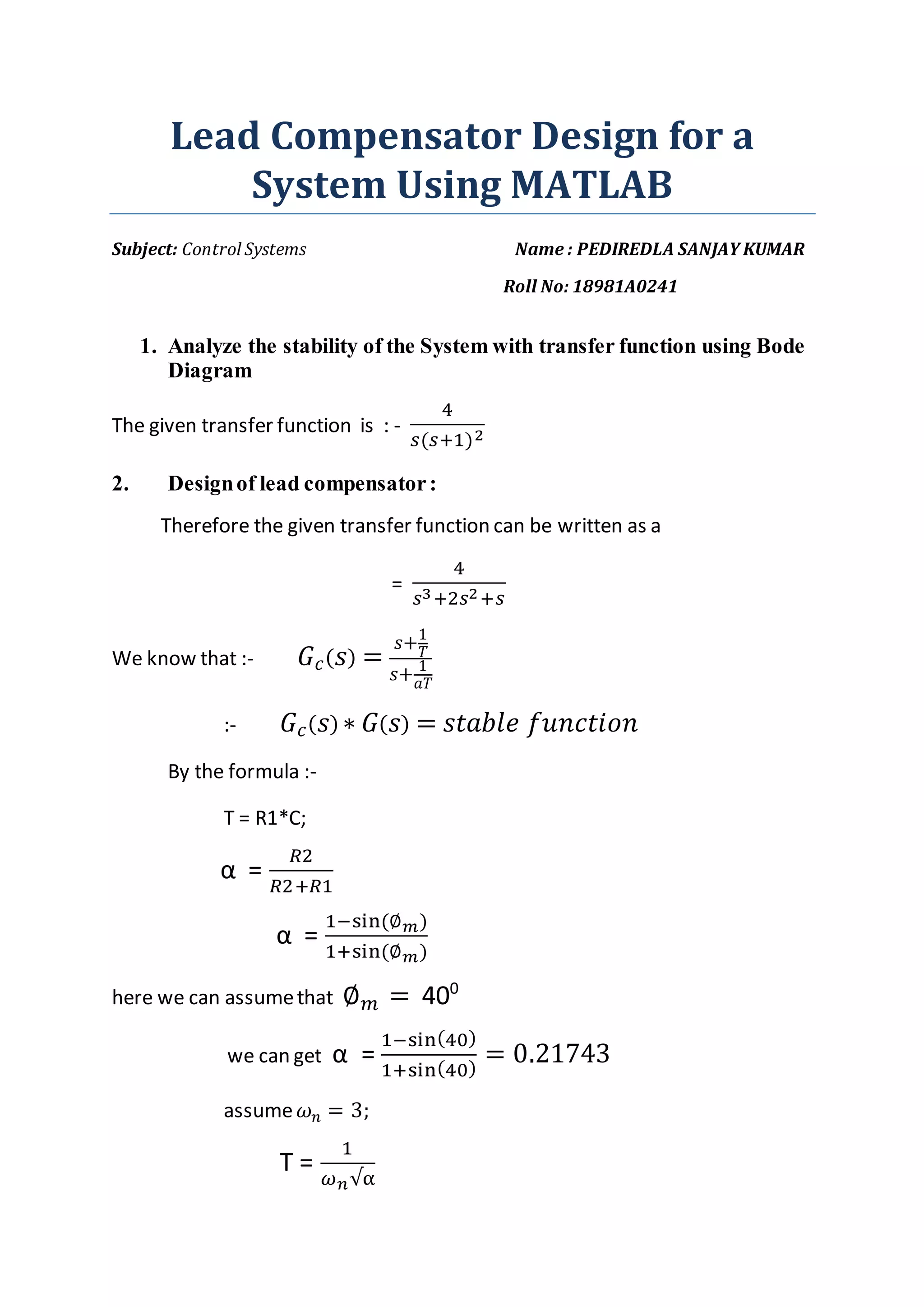
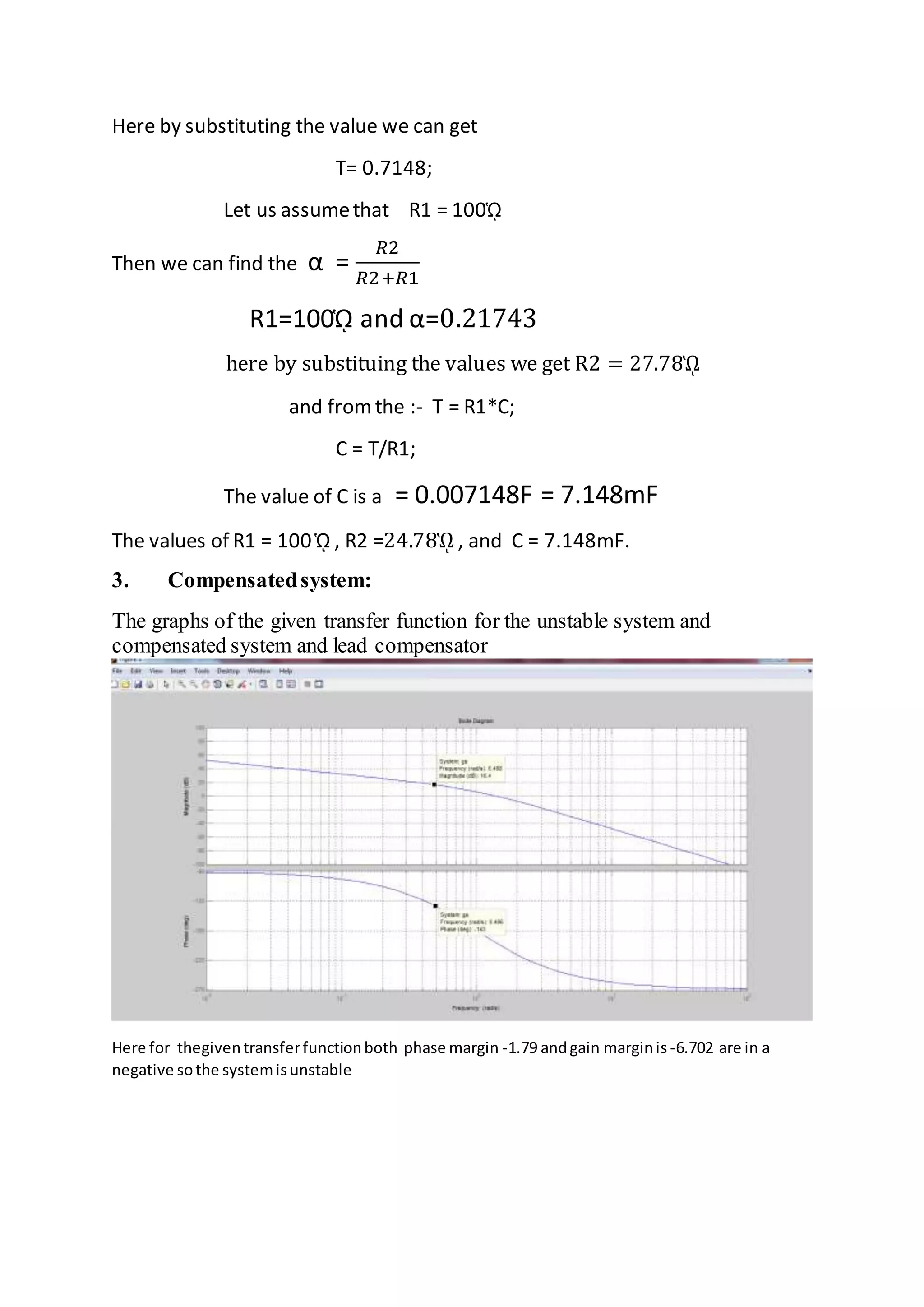



The document discusses the design of a lead compensator for a control system using MATLAB, focusing on stability analysis through Bode diagrams. Initial calculations reveal instability with negative phase and gain margins, but after compensation, both margins become positive, indicating system stability. Key parameters such as resistances and capacitance values are also derived in the document.