Downloaded 28 times







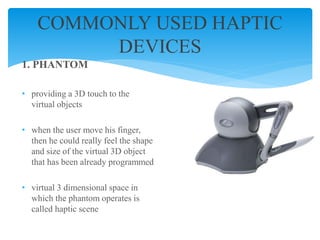







Haptics is the technology of adding the sense of touch to virtual objects. It involves tactile and kinesthetic feedback to make virtual objects seem real. Haptics links the brain's sensing of body position and movement through sensory nerves. Popular haptic devices include the Phantom interface and CyberGrasp system. The Phantom allows the user to feel the shape and size of 3D virtual objects. CyberGrasp fits over the hand like an exoskeleton and provides force feedback to each finger. Haptics has applications in medical training simulation, military terrain simulation, and future consumer devices.