Downloaded 22 times






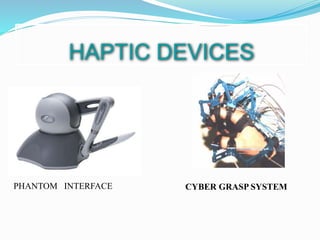


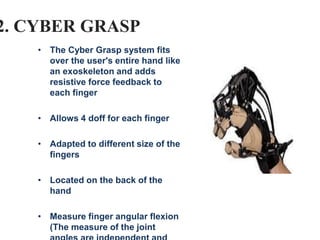











Haptics is a technology that uses touch sensations to allow users to interact with virtual objects. It works by linking sensors in the body to actuators that provide resistance and movement to simulate the sense of touch. Common haptic devices include Phantom interfaces and Cyber Grasp systems which provide force feedback to users handling virtual objects. Haptics has applications in areas like medical training, military simulations, and entertainment like gaming.










































































