Downloaded 47 times



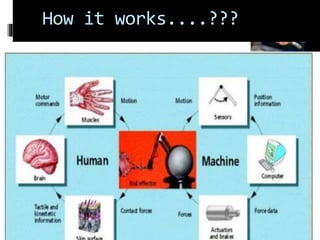
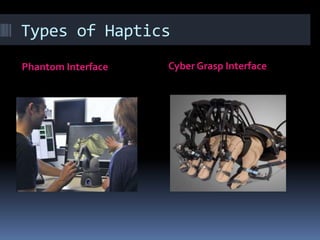






This document discusses haptics technology. It begins by defining haptics as technology that adds the sense of touch to computers by using haptic devices. It then describes how haptic devices give users a sense of touch with virtual objects in computer-generated environments, making the objects seem real. The document outlines different types of haptic interfaces like the Phantom and Cyber Grasp interfaces. It also discusses haptic information transfer like tactile and force feedback. Finally, it lists some applications of haptics technology in fields like medicine, robotics, gaming, art and museums.






























































![HAPTIC_TECHNOLOGY[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/haptictechnology1-221123114420-d6c7e987-thumbnail.jpg?width=640&height=640&fit=bounds)



















