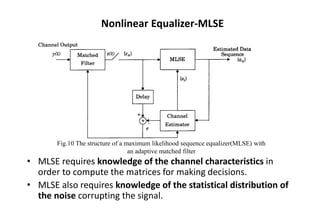
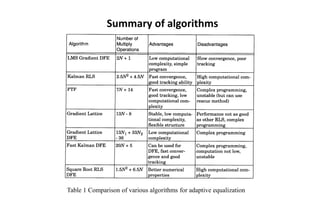
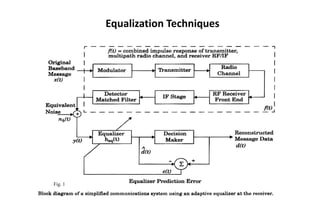
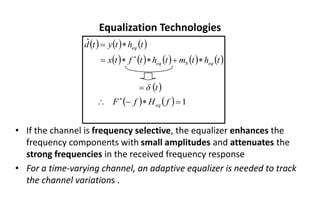
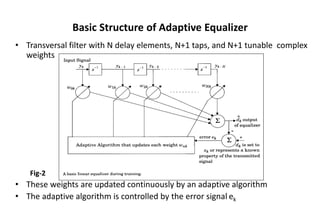
The document discusses various techniques for equalization and adaptive equalization algorithms. It describes three main techniques used for improving receiver signal quality: equalization, diversity, and channel coding. Equalization compensates for interference created by multipath channels, while diversity reduces fading. Channel coding adds redundant bits to transmitted messages. The document then covers linear and nonlinear equalization techniques, including transversal filters, decision feedback equalization, and maximum likelihood sequence estimation. It also discusses factors that influence the choice of equalization structure and algorithm, such as channel characteristics and computational complexity. Finally, it provides a brief overview of common adaptive equalization algorithms like zero forcing, LMS, and RLS.


![Equalization Techniques
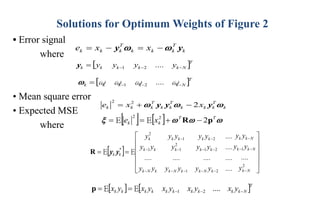
• Classical equalization theory : using training sequence to minimize the
cost function
• Recent techniques for adaptive algorithm : blind algorithms
• Constant Modulus Algorithm (CMA, used for constant envelope
modulation)
• Spectral Coherence Restoral Algorithm (SCORE, exploits spectral
redundancy or cyclostationarity in the Tx signal)
E[e(k) e*(k)]](https://image.slidesharecdn.com/equalization-221130153732-3c1ad5d0/85/Equalization-pdf-9-320.jpg)
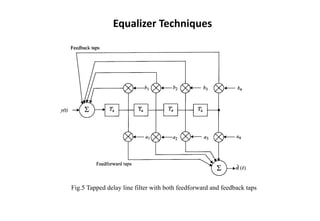
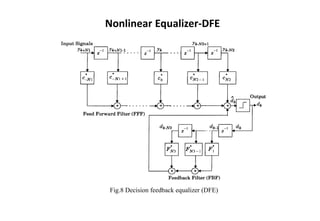
![Nonlinear Equalization--DFE
• Basic idea : once an information symbol has been detected and
decided upon, the ISI that it induces on future symbols can be
estimated and subtracted out before detection of subsequent symbols
• Can be realized in either the direct transversal form (see Fig.8) or as a
lattice filter
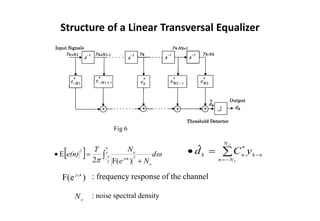
=
−
−
−
=
+
=
3
2
1
N
1
i
i
k
i
n
k
N
N
n
*
n
k d
F
y
C
d̂
}
d
]
N
)
e
(
N
[
ln
2
T
{
exp
e(n) T
T o
2
T
j
o
min
2
−
+
=
F
E](https://image.slidesharecdn.com/equalization-221130153732-3c1ad5d0/85/Equalization-pdf-20-320.jpg)