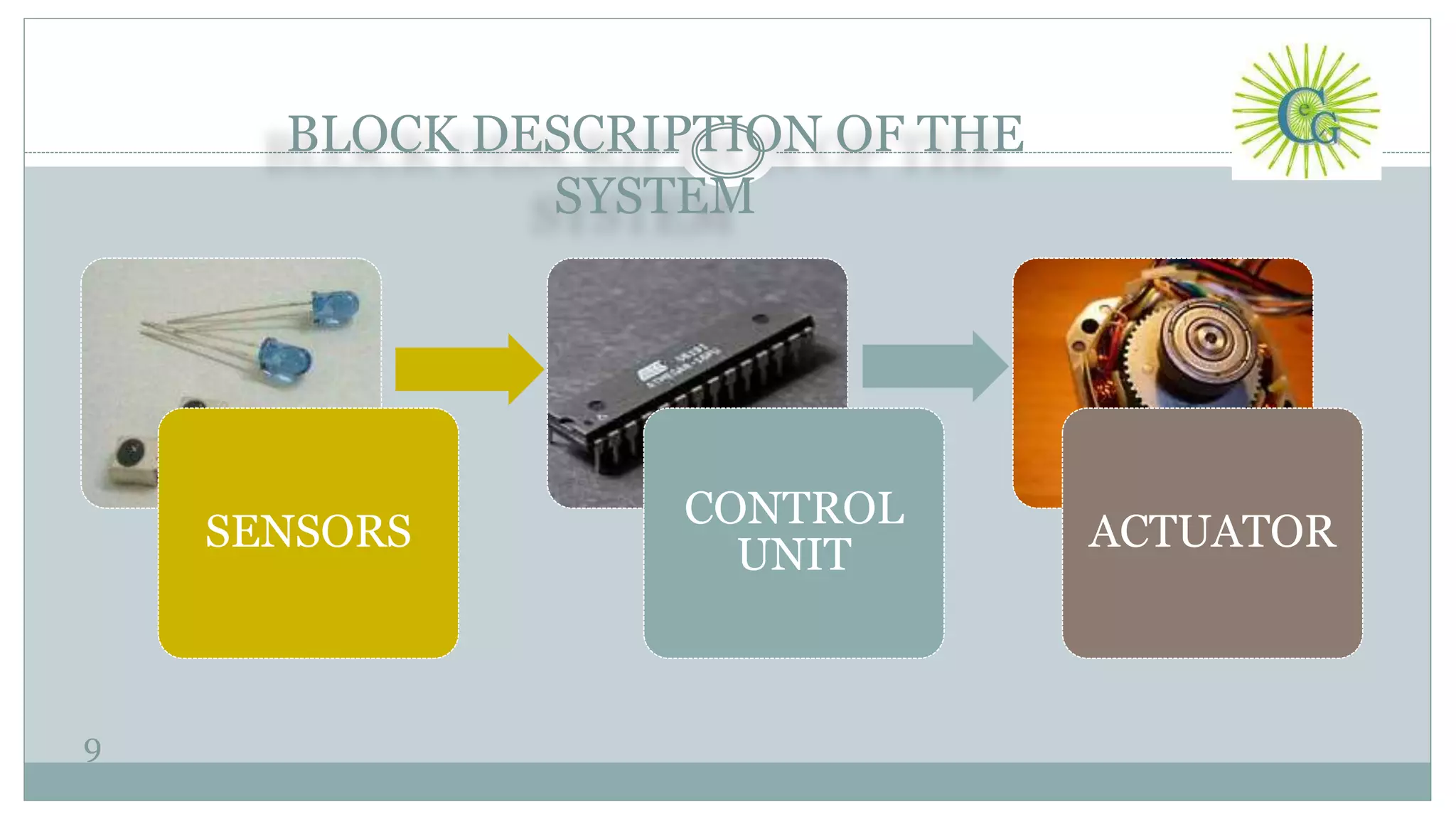
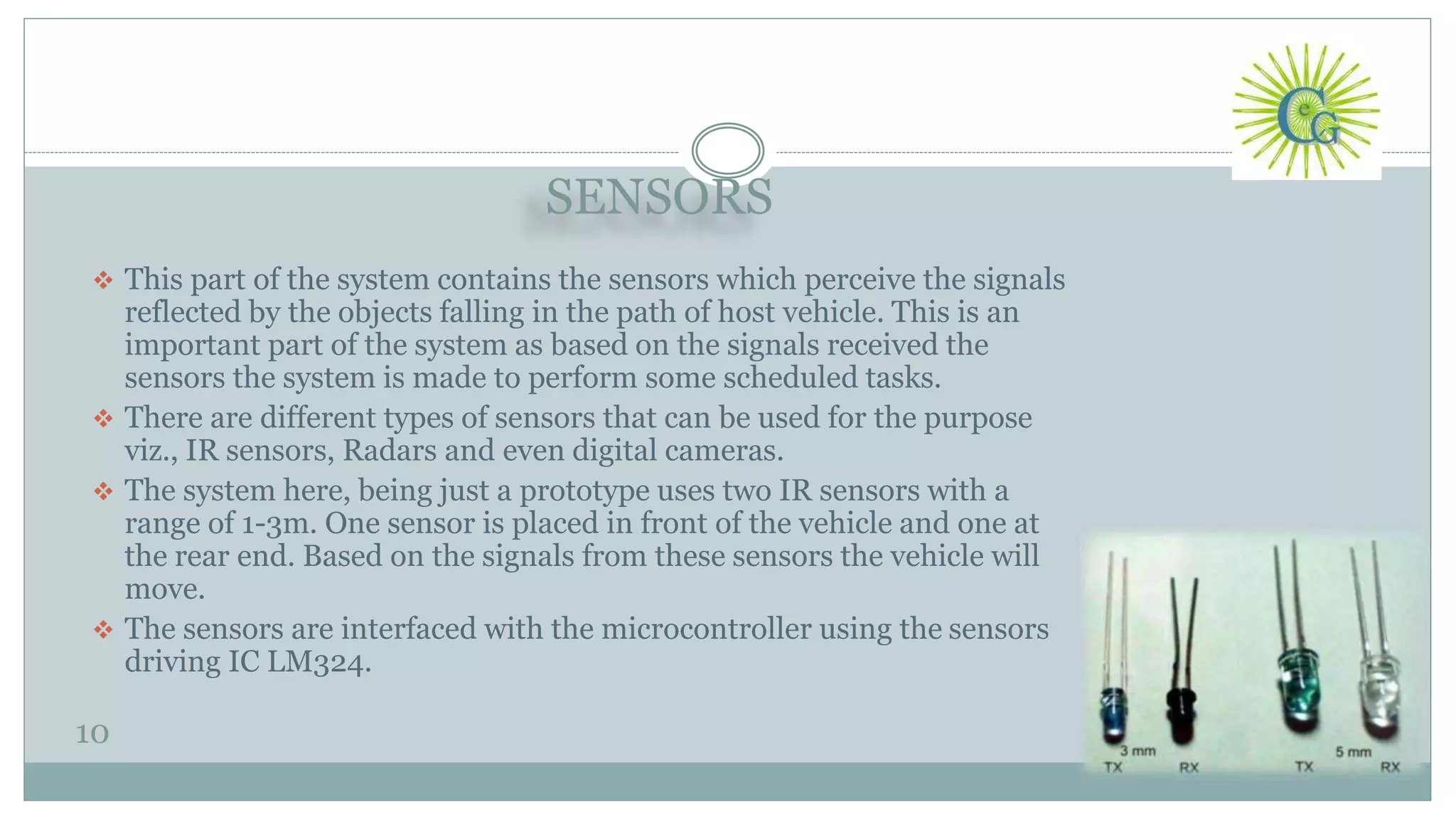
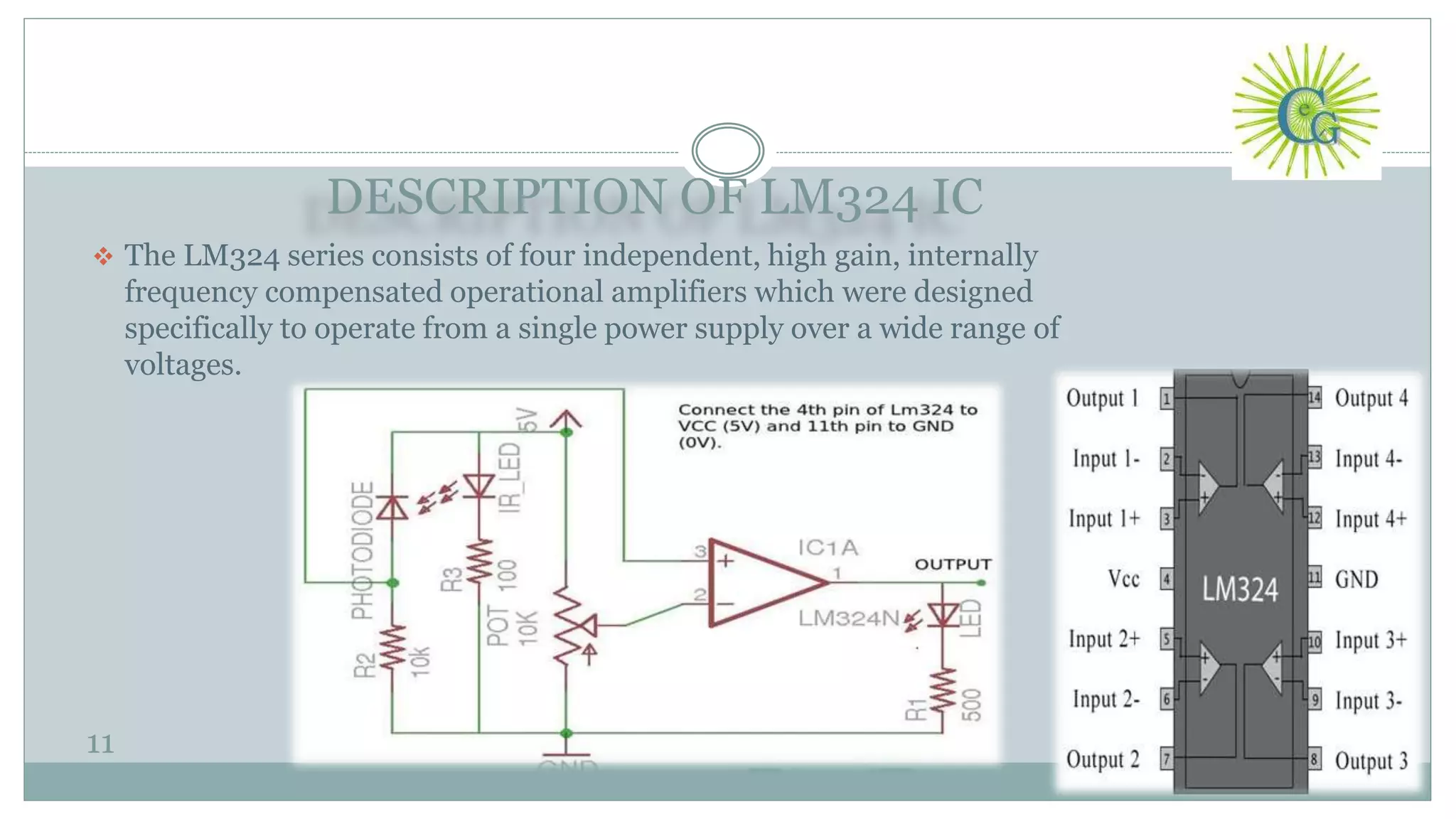
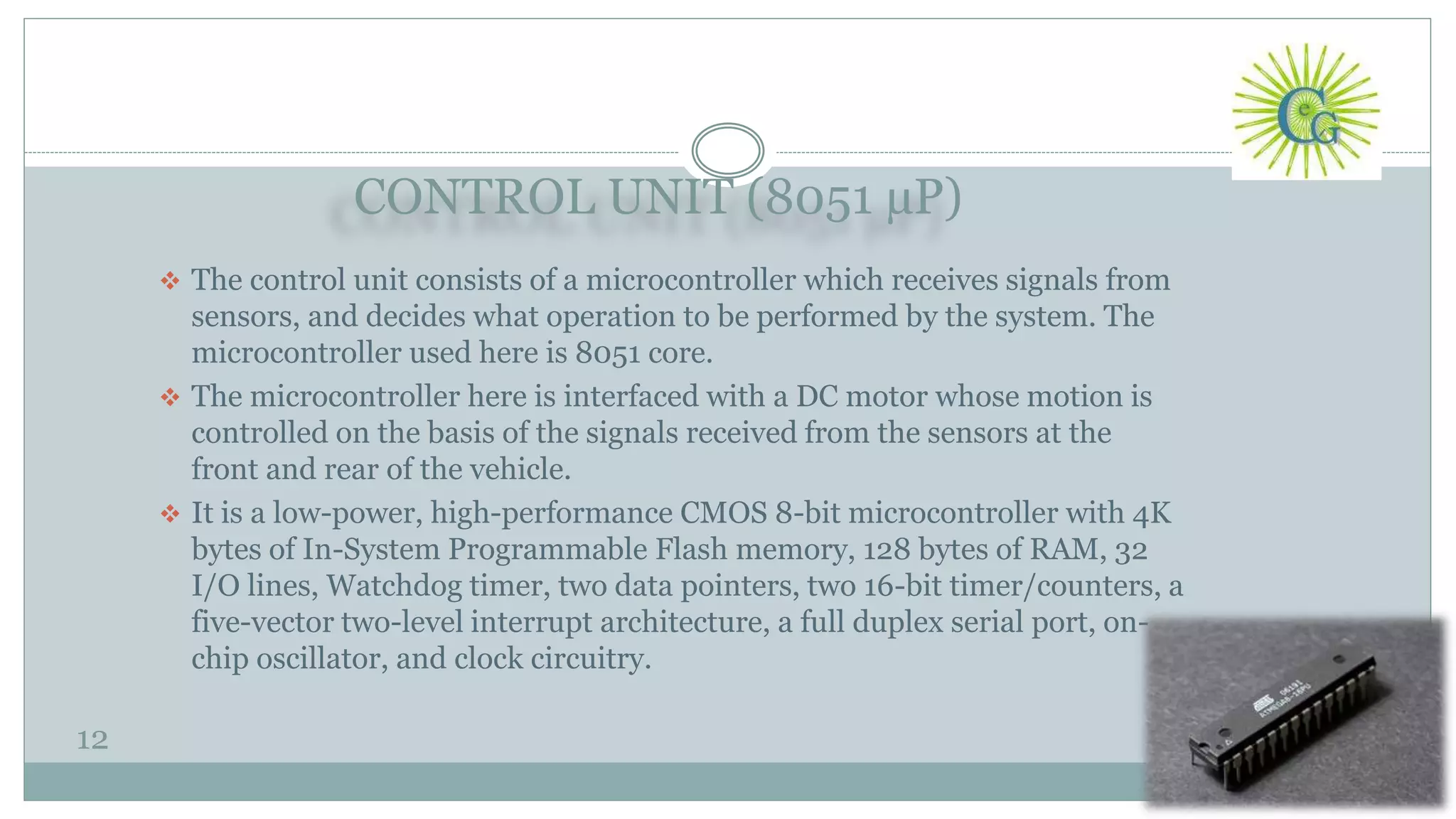
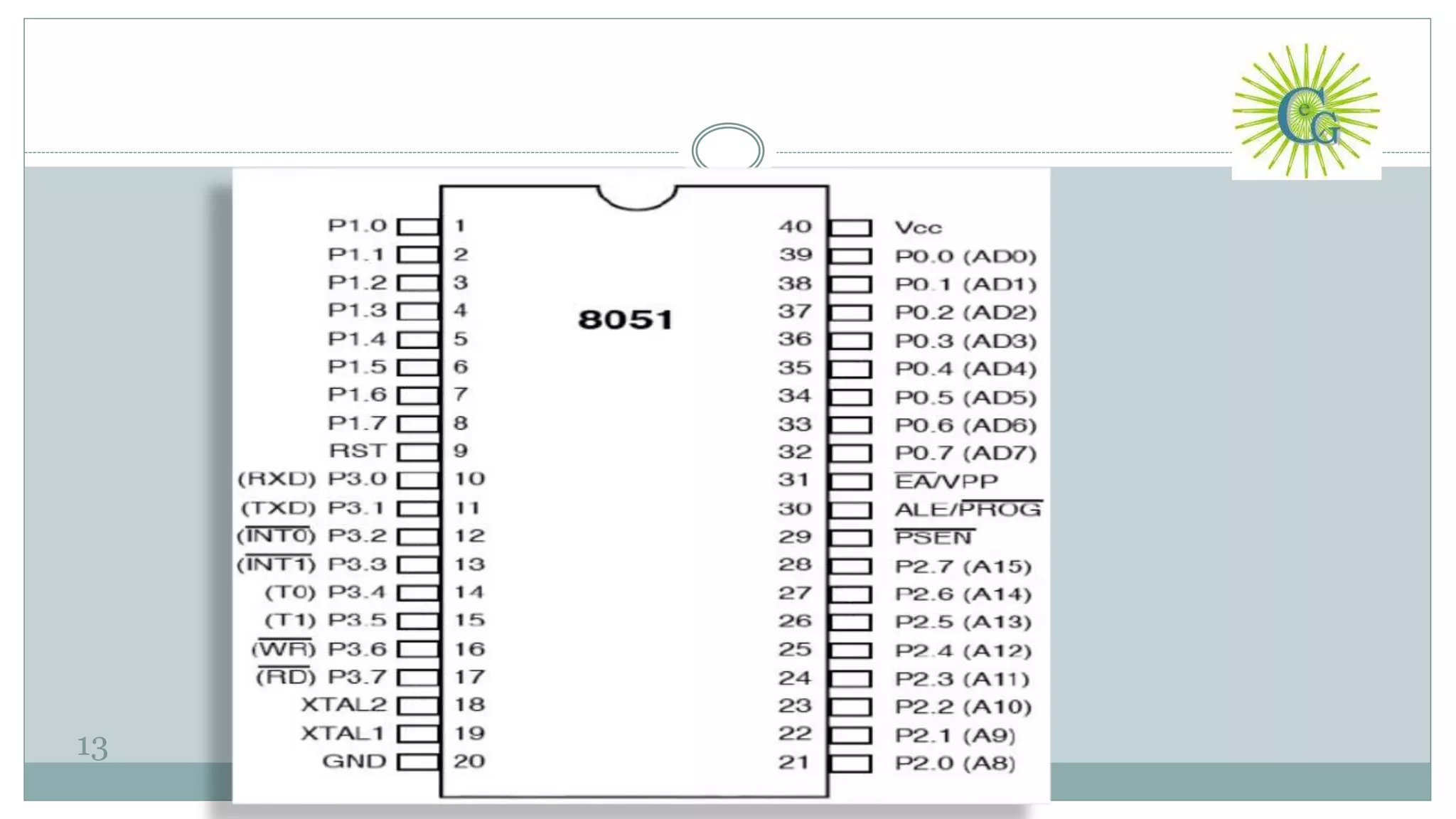
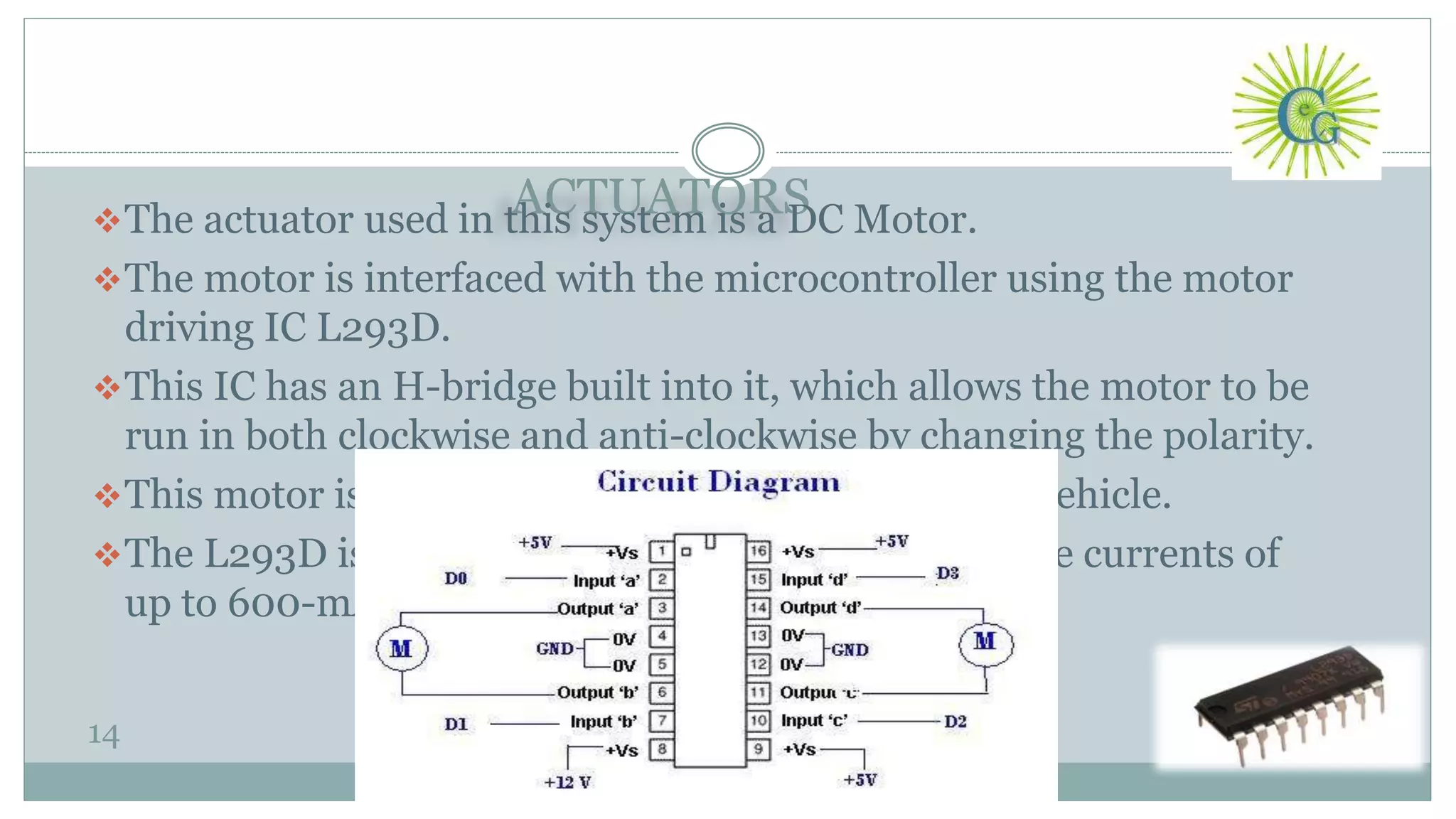
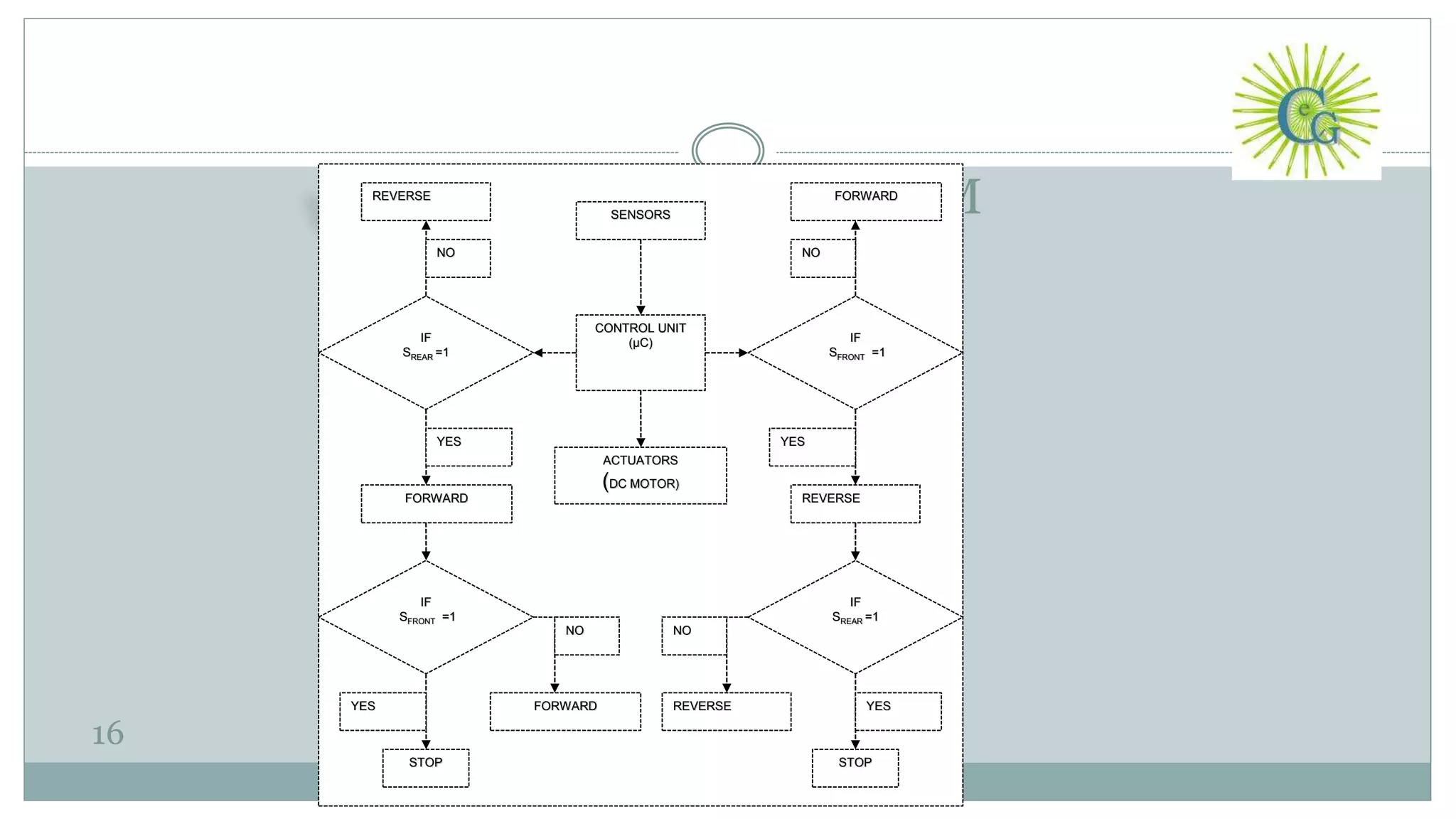
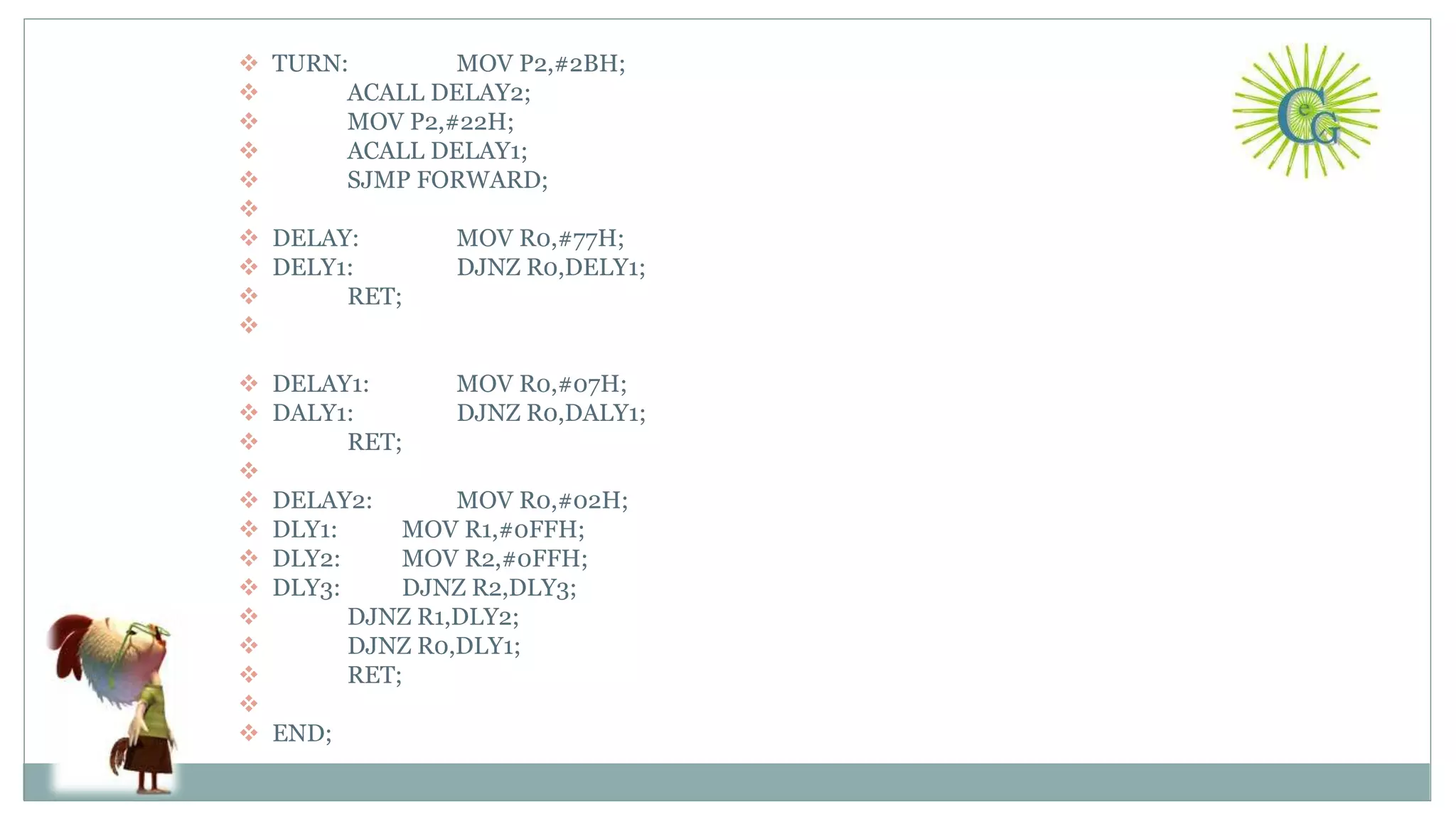
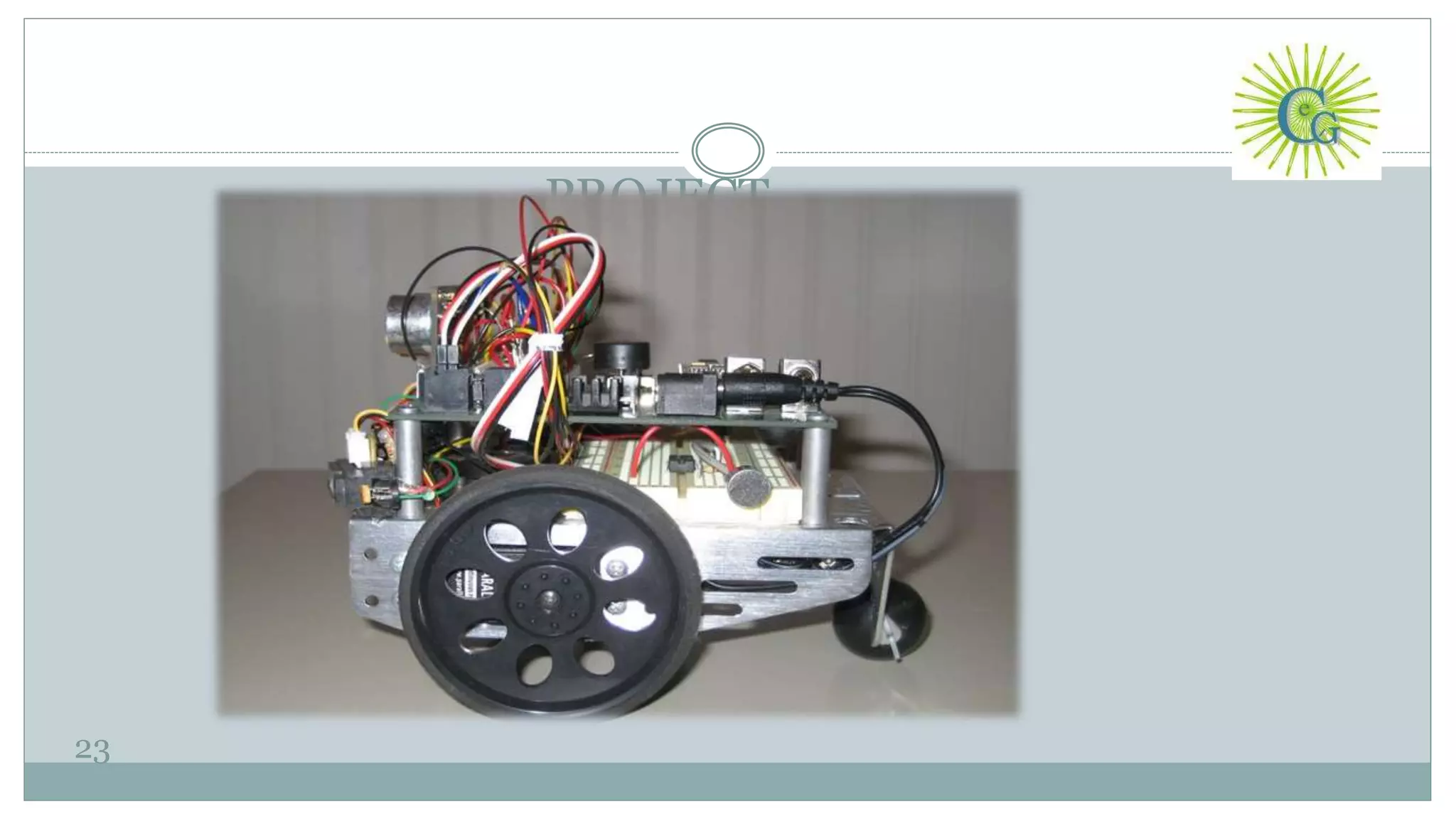
This document provides an overview of an embedded systems project to create a collision avoidance robot. It discusses the components of the robot including sensors to detect obstacles, a microcontroller to process sensor signals and control movement, and a motor to move the robot forward and backward. The document also describes the software used to program the microcontroller and provides sample code to control the robot's movement based on sensor readings.