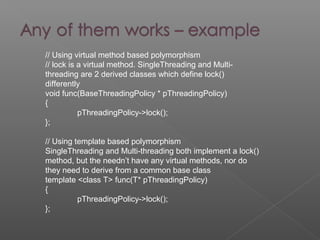
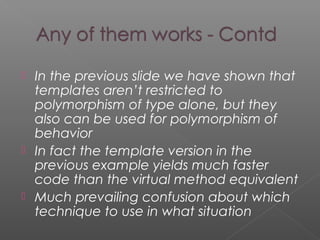
The document discusses the differences between polymorphism achieved through virtual methods (runtime polymorphism) vs templates (compile-time polymorphism) in C++. It provides examples of implementing the same functionality using both approaches and compares their performance, type safety, and other characteristics. It also discusses best practices for combining templates and inheritance to leverage their strengths while avoiding weaknesses.

![ Best of both worlds
› Have base class know the derived class type
by using templates [So, getInstance in the
base class is able to create a derived class
instance]
› Enforce ‘Is-A’ relationship using inheritance
[Eg: Make ctor private in the base class, so
nobody can instantiate a derived class
instance as well]](https://image.slidesharecdn.com/staticanddynamicpolymorphism-160607183835/85/Static-and-dynamic-polymorphism-14-320.jpg)
![ Synergy again
› Base classes need to share the static
attributes
› Use templates to get over that issue – One
base class generated for each derived class
› Use inheritance for the ‘Is-A’ relationship
[Whenever the class ctor is called, the base
class ctor is called, likewise for the dtor,
increment and decrement operations
happen automatically]](https://image.slidesharecdn.com/staticanddynamicpolymorphism-160607183835/85/Static-and-dynamic-polymorphism-15-320.jpg)
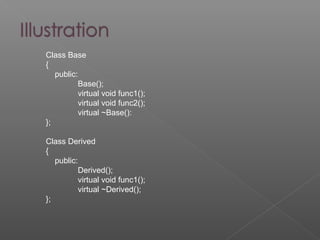

![ The compiler would have converted all
your virtual method calls
› Your call: pDerived->func2();
› It’s become: (*pDerived->vptr[1])(pDerived)
As we see above, the vptr stored by the
compiler in the derived object is looked
up, an offset (+1) added to get to the
second virtual method in the class, and
the function is called](https://image.slidesharecdn.com/staticanddynamicpolymorphism-160607183835/85/Static-and-dynamic-polymorphism-20-320.jpg)