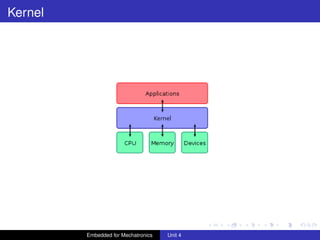
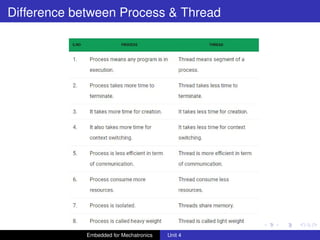
This document discusses operating systems for embedded systems. It provides examples of embedded operating systems like Raspian, Symbian, BlackBerry OS, and Embedded Linux. It describes the differences between embedded and non-embedded operating systems. It also discusses key concepts for embedded operating systems like the kernel, processes vs threads, context switching, scheduling, inter-process communication, memory management, and real-time operating systems.