Download to read offline

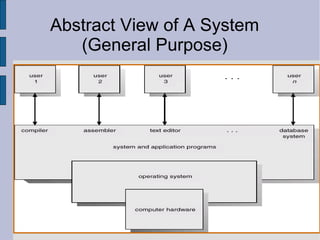
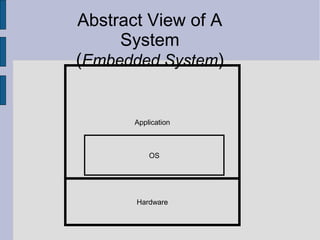
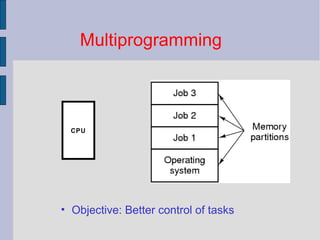




- Real-time operating systems provide tools for prioritized control and synchronization of tasks on embedded systems. They manage processes, memory, and communication between tasks. - An OS acts as an intermediary between the user and hardware, making use of the computer convenient and efficient by hiding messy details and optimally allocating resources like the CPU. - On embedded systems specifically, an OS provides software tools to conveniently control tasks according to programmer-assigned priorities and synchronize access to shared resources through mechanisms like semaphores.