Download as PDF, PPTX
![Characteristics of Embedded Systems (3)
• Many ES must meet real‐time constraints:
– A real-time system must react to stimuli from
the controlled object (or the operator) within the
time interval dictated by the environment.
– For real‐time systems, right answers arriving too late
(or even too early) are wrong.
(or even too early) are wrong
• “A real‐time constraint is called hard, if not
meeting thatconstraint could result in a
g
catastrophe”[Kopetz, 1997].
• All other time‐constraints are called soft.
• A guaranteed system response has to be
explained without statistical arguments.](https://image.slidesharecdn.com/introductiontoembeddedsystemdesign-111230080657-phpapp01/85/Introduction-to-embedded-system-design-17-320.jpg)
![Characteristics of Embedded Systems (4)
• Frequently connected to physical environment
through sensors and actuators,
• Hybrid systems (analog + digital parts).
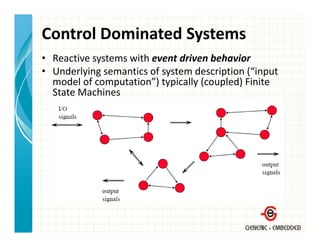
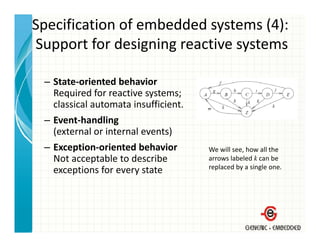
• Typically, ES are reactive systems:
• “A reactive system is one which is in continual
interaction with is environment and executes at
a pace determined by that environment“
d i db h i “
[Bergé, 1995]
• B h i d
Behavior depends on input and current state.
d i t d t t t
– automata model often appropriate,](https://image.slidesharecdn.com/introductiontoembeddedsystemdesign-111230080657-phpapp01/85/Introduction-to-embedded-system-design-18-320.jpg)

![Models
• Definition: A model is a simplification of another entity,
which can be a physical thing or another model. The model
which can be a physical thing or another model. The model
contains exactly those characteristics and properties of the
modeled entity that are relevant for a given task. A model
• is minimal with respect to a task if it does not contain any
is minimal with respect to a task if it does not contain any
other characteristics than those relevant for the task.
[Jantsch, 2004]:
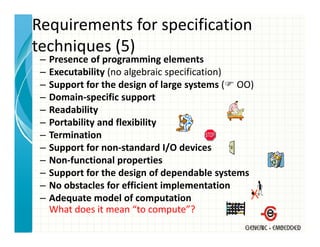
Which requirements do we have for our models?](https://image.slidesharecdn.com/introductiontoembeddedsystemdesign-111230080657-phpapp01/85/Introduction-to-embedded-system-design-55-320.jpg)
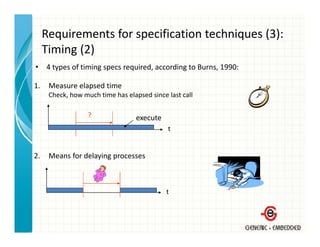
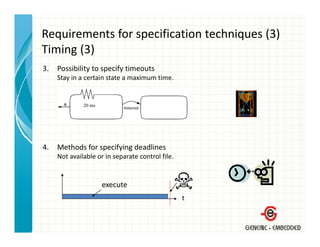
![Requirements for specification techniques (3):
Timing
Ti i
– Timing behavior
Essential for embedded and cy‐phy systems!
• Additional information (periods, dependences,
scenarios, use cases) welcome
• Also the speed of the underlying platform must be
Also, the speed of the underlying platform must be
known
• Far‐reaching consequences for design processes!
“The lack of timing in the core abstraction (of computer science) is a flaw, from the
perspective of embedded software” [Lee, 2005]](https://image.slidesharecdn.com/introductiontoembeddedsystemdesign-111230080657-phpapp01/85/Introduction-to-embedded-system-design-58-320.jpg)



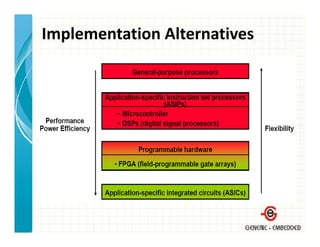
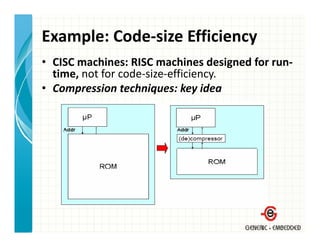
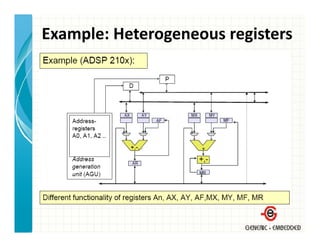
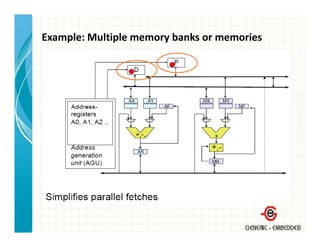
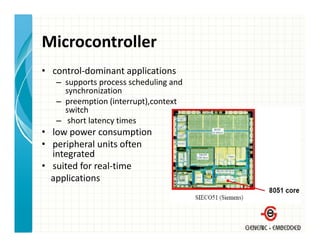
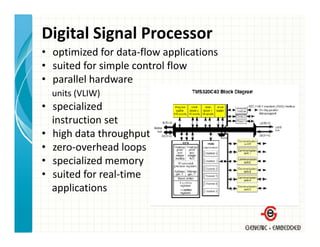
1) Embedded systems are computer systems designed to perform dedicated functions within larger mechanical or electrical systems, often with real-time computing constraints. 2) Hardware platforms for embedded systems include microcontrollers optimized for control applications, digital signal processors for data-intensive applications, and programmable hardware or ASICs. 3) System specialization is important for embedded systems, through techniques like application-specific instruction sets, optimized memory architectures, and heterogeneous registers. This improves properties like performance, power efficiency, and predictability.