Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Deep Learning JP
PDF, PPTX
1,397 views
[DL輪読会]Learning an Embedding Space for Transferable Robot Skills
2018/03/02 Deep Learning JP: http://deeplearning.jp/seminar-2/
Technology
◦
Read more
3
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 21
2
/ 21
3
/ 21
4
/ 21
5
/ 21
6
/ 21
7
/ 21
8
/ 21
9
/ 21
10
/ 21
11
/ 21
12
/ 21
13
/ 21
14
/ 21
15
/ 21
16
/ 21
17
/ 21
18
/ 21
19
/ 21
20
/ 21
21
/ 21
More Related Content
PDF
第3回NIPS読み会・関西発表資料
by
Takato Horii
PDF
[DL輪読会]Deep Reinforcement Learning that Matters
by
Deep Learning JP
PDF
スペクトラルグラフ理論入門
by
irrrrr
PDF
幾何を使った統計のはなし
by
Toru Imai
PDF
2019年度チュートリアルBPE
by
広樹 本間
PDF
【DL輪読会】Perceiver io a general architecture for structured inputs & outputs
by
Deep Learning JP
PDF
POMDP下での強化学習の基礎と応用
by
Yasunori Ozaki
PDF
CVIM#11 3. 最小化のための数値計算
by
sleepy_yoshi
第3回NIPS読み会・関西発表資料
by
Takato Horii
[DL輪読会]Deep Reinforcement Learning that Matters
by
Deep Learning JP
スペクトラルグラフ理論入門
by
irrrrr
幾何を使った統計のはなし
by
Toru Imai
2019年度チュートリアルBPE
by
広樹 本間
【DL輪読会】Perceiver io a general architecture for structured inputs & outputs
by
Deep Learning JP
POMDP下での強化学習の基礎と応用
by
Yasunori Ozaki
CVIM#11 3. 最小化のための数値計算
by
sleepy_yoshi
What's hot
PPTX
【DL輪読会】言語以外でのTransformerのまとめ (ViT, Perceiver, Frozen Pretrained Transformer etc)
by
Deep Learning JP
PDF
SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法
by
SSII
PDF
深層学習による自然言語処理入門: word2vecからBERT, GPT-3まで
by
Yahoo!デベロッパーネットワーク
PPTX
【解説】 一般逆行列
by
Kenjiro Sugimoto
PDF
最適輸送の計算アルゴリズムの研究動向
by
ohken
PDF
【DL輪読会】CLIPORT: What and Where Pathways for Robotic Manipulation (CoRL 2021)
by
Deep Learning JP
PDF
ICML 2020 最適輸送まとめ
by
ohken
PDF
最近のディープラーニングのトレンド紹介_20200925
by
小川 雄太郎
PDF
[DL輪読会]`強化学習のための状態表現学習 -より良い「世界モデル」の獲得に向けて-
by
Deep Learning JP
PDF
Deep learningの発展と化学反応への応用 - 日本化学会第101春季大会(2021)
by
Preferred Networks
PDF
Semantic segmentation
by
Takuya Minagawa
PDF
【メタサーベイ】数式ドリブン教師あり学習
by
cvpaper. challenge
PDF
12. Diffusion Model の数学的基礎.pdf
by
幸太朗 岩澤
PDF
[DL輪読会]Hindsight Experience Replay
by
Deep Learning JP
PPTX
[DL輪読会]Clebsch–Gordan Nets: a Fully Fourier Space Spherical Convolutional Neu...
by
Deep Learning JP
PDF
[DL輪読会]Learning Transferable Visual Models From Natural Language Supervision
by
Deep Learning JP
PPTX
Curriculum Learning (関東CV勉強会)
by
Yoshitaka Ushiku
PDF
ConditionalPointDiffusion.pdf
by
Takuya Minagawa
PDF
方策勾配型強化学習の基礎と応用
by
Ryo Iwaki
PDF
変分推論法(変分ベイズ法)(PRML第10章)
by
Takao Yamanaka
【DL輪読会】言語以外でのTransformerのまとめ (ViT, Perceiver, Frozen Pretrained Transformer etc)
by
Deep Learning JP
SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法
by
SSII
深層学習による自然言語処理入門: word2vecからBERT, GPT-3まで
by
Yahoo!デベロッパーネットワーク
【解説】 一般逆行列
by
Kenjiro Sugimoto
最適輸送の計算アルゴリズムの研究動向
by
ohken
【DL輪読会】CLIPORT: What and Where Pathways for Robotic Manipulation (CoRL 2021)
by
Deep Learning JP
ICML 2020 最適輸送まとめ
by
ohken
最近のディープラーニングのトレンド紹介_20200925
by
小川 雄太郎
[DL輪読会]`強化学習のための状態表現学習 -より良い「世界モデル」の獲得に向けて-
by
Deep Learning JP
Deep learningの発展と化学反応への応用 - 日本化学会第101春季大会(2021)
by
Preferred Networks
Semantic segmentation
by
Takuya Minagawa
【メタサーベイ】数式ドリブン教師あり学習
by
cvpaper. challenge
12. Diffusion Model の数学的基礎.pdf
by
幸太朗 岩澤
[DL輪読会]Hindsight Experience Replay
by
Deep Learning JP
[DL輪読会]Clebsch–Gordan Nets: a Fully Fourier Space Spherical Convolutional Neu...
by
Deep Learning JP
[DL輪読会]Learning Transferable Visual Models From Natural Language Supervision
by
Deep Learning JP
Curriculum Learning (関東CV勉強会)
by
Yoshitaka Ushiku
ConditionalPointDiffusion.pdf
by
Takuya Minagawa
方策勾配型強化学習の基礎と応用
by
Ryo Iwaki
変分推論法(変分ベイズ法)(PRML第10章)
by
Takao Yamanaka
Similar to [DL輪読会]Learning an Embedding Space for Transferable Robot Skills
PPT
Deep Auto-Encoder Neural Networks in Reiforcement Learnning (第 9 回 Deep Learn...
by
Ohsawa Goodfellow
PDF
Deeplearning lt.pdf
by
Deep Learning JP
PDF
Deep Learningの基礎と応用
by
Seiya Tokui
PDF
Recurrent Neural Networks
by
Seiya Tokui
PDF
[DL輪読会]Imagination-Augmented Agents for Deep Reinforcement Learning / Learnin...
by
Deep Learning JP
PPTX
[DL輪読会]Temporal DifferenceVariationalAuto-Encoder
by
Deep Learning JP
PDF
20150930
by
nlab_utokyo
DOCX
レポート深層学習Day4
by
ssuser9d95b3
PPTX
[DL輪読会]Autonomous Reinforcement Learning: Formalism and Benchmarking
by
Deep Learning JP
PDF
[DL輪読会]Beyond Shared Hierarchies: Deep Multitask Learning through Soft Layer ...
by
Deep Learning JP
PDF
[DL輪読会]Temporal Abstraction in NeurIPS2019
by
Deep Learning JP
PDF
Learning to Navigate in Complex Environments 輪読
by
Tatsuya Matsushima
PPTX
全脳関西編(松尾)
by
Yutaka Matsuo
PDF
未来画像予測モデルと時間重み付けを導入した価値関数に基づく強化学習
by
MILab
PPTX
"Universal Planning Networks" and "Composable Planning with Attributes"
by
Yusuke Iwasawa
PDF
AI(強化学習)でロボットに学習させてみた
by
akmtt
PPTX
「機械学習とは?」から始める Deep learning実践入門
by
Hideto Masuoka
PDF
ヒューマノイドロボット頂上決戦と人工知能:実践と理論のギャップを探る
by
Akihiko Yamaguchi
PDF
TensorFlowで逆強化学習
by
Mitsuhisa Ohta
PPTX
Hello deeplearning!
by
T2C_
Deep Auto-Encoder Neural Networks in Reiforcement Learnning (第 9 回 Deep Learn...
by
Ohsawa Goodfellow
Deeplearning lt.pdf
by
Deep Learning JP
Deep Learningの基礎と応用
by
Seiya Tokui
Recurrent Neural Networks
by
Seiya Tokui
[DL輪読会]Imagination-Augmented Agents for Deep Reinforcement Learning / Learnin...
by
Deep Learning JP
[DL輪読会]Temporal DifferenceVariationalAuto-Encoder
by
Deep Learning JP
20150930
by
nlab_utokyo
レポート深層学習Day4
by
ssuser9d95b3
[DL輪読会]Autonomous Reinforcement Learning: Formalism and Benchmarking
by
Deep Learning JP
[DL輪読会]Beyond Shared Hierarchies: Deep Multitask Learning through Soft Layer ...
by
Deep Learning JP
[DL輪読会]Temporal Abstraction in NeurIPS2019
by
Deep Learning JP
Learning to Navigate in Complex Environments 輪読
by
Tatsuya Matsushima
全脳関西編(松尾)
by
Yutaka Matsuo
未来画像予測モデルと時間重み付けを導入した価値関数に基づく強化学習
by
MILab
"Universal Planning Networks" and "Composable Planning with Attributes"
by
Yusuke Iwasawa
AI(強化学習)でロボットに学習させてみた
by
akmtt
「機械学習とは?」から始める Deep learning実践入門
by
Hideto Masuoka
ヒューマノイドロボット頂上決戦と人工知能:実践と理論のギャップを探る
by
Akihiko Yamaguchi
TensorFlowで逆強化学習
by
Mitsuhisa Ohta
Hello deeplearning!
by
T2C_
More from Deep Learning JP
PPTX
【DL輪読会】AdaptDiffuser: Diffusion Models as Adaptive Self-evolving Planners
by
Deep Learning JP
PPTX
【DL輪読会】事前学習用データセットについて
by
Deep Learning JP
PPTX
【DL輪読会】 "Learning to render novel views from wide-baseline stereo pairs." CVP...
by
Deep Learning JP
PPTX
【DL輪読会】Zero-Shot Dual-Lens Super-Resolution
by
Deep Learning JP
PPTX
【DL輪読会】BloombergGPT: A Large Language Model for Finance arxiv
by
Deep Learning JP
PPTX
【DL輪読会】マルチモーダル LLM
by
Deep Learning JP
PDF
【 DL輪読会】ToolLLM: Facilitating Large Language Models to Master 16000+ Real-wo...
by
Deep Learning JP
PPTX
【DL輪読会】AnyLoc: Towards Universal Visual Place Recognition
by
Deep Learning JP
PDF
【DL輪読会】Can Neural Network Memorization Be Localized?
by
Deep Learning JP
PPTX
【DL輪読会】Hopfield network 関連研究について
by
Deep Learning JP
PPTX
【DL輪読会】SimPer: Simple self-supervised learning of periodic targets( ICLR 2023 )
by
Deep Learning JP
PDF
【DL輪読会】RLCD: Reinforcement Learning from Contrast Distillation for Language M...
by
Deep Learning JP
PDF
【DL輪読会】"Secrets of RLHF in Large Language Models Part I: PPO"
by
Deep Learning JP
PPTX
【DL輪読会】"Language Instructed Reinforcement Learning for Human-AI Coordination "
by
Deep Learning JP
PPTX
【DL輪読会】Llama 2: Open Foundation and Fine-Tuned Chat Models
by
Deep Learning JP
PDF
【DL輪読会】"Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware"
by
Deep Learning JP
PPTX
【DL輪読会】Parameter is Not All You Need:Starting from Non-Parametric Networks fo...
by
Deep Learning JP
PDF
【DL輪読会】Drag Your GAN: Interactive Point-based Manipulation on the Generative ...
by
Deep Learning JP
PDF
【DL輪読会】Self-Supervised Learning from Images with a Joint-Embedding Predictive...
by
Deep Learning JP
PPTX
【DL輪読会】Towards Understanding Ensemble, Knowledge Distillation and Self-Distil...
by
Deep Learning JP
【DL輪読会】AdaptDiffuser: Diffusion Models as Adaptive Self-evolving Planners
by
Deep Learning JP
【DL輪読会】事前学習用データセットについて
by
Deep Learning JP
【DL輪読会】 "Learning to render novel views from wide-baseline stereo pairs." CVP...
by
Deep Learning JP
【DL輪読会】Zero-Shot Dual-Lens Super-Resolution
by
Deep Learning JP
【DL輪読会】BloombergGPT: A Large Language Model for Finance arxiv
by
Deep Learning JP
【DL輪読会】マルチモーダル LLM
by
Deep Learning JP
【 DL輪読会】ToolLLM: Facilitating Large Language Models to Master 16000+ Real-wo...
by
Deep Learning JP
【DL輪読会】AnyLoc: Towards Universal Visual Place Recognition
by
Deep Learning JP
【DL輪読会】Can Neural Network Memorization Be Localized?
by
Deep Learning JP
【DL輪読会】Hopfield network 関連研究について
by
Deep Learning JP
【DL輪読会】SimPer: Simple self-supervised learning of periodic targets( ICLR 2023 )
by
Deep Learning JP
【DL輪読会】RLCD: Reinforcement Learning from Contrast Distillation for Language M...
by
Deep Learning JP
【DL輪読会】"Secrets of RLHF in Large Language Models Part I: PPO"
by
Deep Learning JP
【DL輪読会】"Language Instructed Reinforcement Learning for Human-AI Coordination "
by
Deep Learning JP
【DL輪読会】Llama 2: Open Foundation and Fine-Tuned Chat Models
by
Deep Learning JP
【DL輪読会】"Learning Fine-Grained Bimanual Manipulation with Low-Cost Hardware"
by
Deep Learning JP
【DL輪読会】Parameter is Not All You Need:Starting from Non-Parametric Networks fo...
by
Deep Learning JP
【DL輪読会】Drag Your GAN: Interactive Point-based Manipulation on the Generative ...
by
Deep Learning JP
【DL輪読会】Self-Supervised Learning from Images with a Joint-Embedding Predictive...
by
Deep Learning JP
【DL輪読会】Towards Understanding Ensemble, Knowledge Distillation and Self-Distil...
by
Deep Learning JP
Recently uploaded
PDF
TomokaEdakawa_職種と講義の関係推定に基づく履修支援システムの基礎検討_HCI2026
by
Matsushita Laboratory
PDF
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
PDF
20260119_VIoTLT_vol22_kitazaki_v1___.pdf
by
Ayachika Kitazaki
PDF
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
PDF
maisugimoto_曖昧さを含む仕様書の改善を目的としたアノテーション支援ツールの検討_HCI2025.pdf
by
Matsushita Laboratory
PDF
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
TomokaEdakawa_職種と講義の関係推定に基づく履修支援システムの基礎検討_HCI2026
by
Matsushita Laboratory
ST2024_PM1_2_Case_study_of_local_newspaper_company.pdf
by
akipii ogaoga
20260119_VIoTLT_vol22_kitazaki_v1___.pdf
by
Ayachika Kitazaki
自転車ユーザ参加型路面画像センシングによる点字ブロック検出における性能向上方法の模索 (20260123 SeMI研)
by
Yuto Matsuda
maisugimoto_曖昧さを含む仕様書の改善を目的としたアノテーション支援ツールの検討_HCI2025.pdf
by
Matsushita Laboratory
Team Topology Adaptive Organizational Design for Rapid Delivery of Valuable S...
by
akipii ogaoga
[DL輪読会]Learning an Embedding Space for Transferable Robot Skills
1.
DEEP LEARNING JP [DL
Papers] LEARNING AN EMBEDDING SPACE FOR TRANSFERABLE ROBOT SKILLS (ICLR 2018 ) Hiroaki Shioya, Matsuo Lab http://deeplearning.jp/ 1
2.
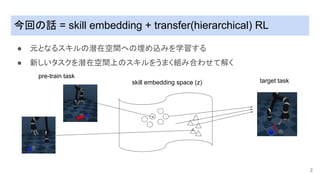
���話 = skill
embedding + transfer(hierarchical) RL ● �となるスキル�潜在空間へ�埋め込みを学習する ● �しいタスクを潜在空間上�スキルをうまく�み��せて解く 2 skill embedding space (z) pre-train task target task
3.
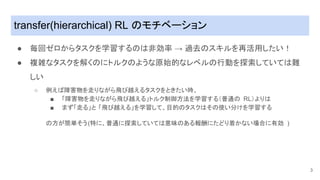
transfer(hierarchical) RL ���ベー��ン ●
毎��ロからタスクを学習する���効率 → ���スキルを�活用したい� ● ��なタスクを解く�にトルク�ような��的な�ベル�行動を��していて�� しい ○ �え����を走�ながら���えるタスクをときたい�、 ■ 「���を走�ながら���える」トルク���法を学習する���� RL�よ�� ■ まず「走る」と 「���える」を学習して、目的�タスク���使い分�を学習する ��が���う(�に、��に��していて�����る��にた���かない��に�効 ) 3
4.
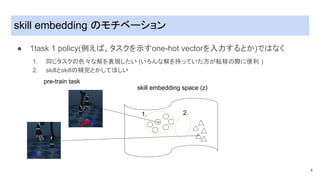
skill embedding ���ベー��ン ●
1task 1 policy(�え�、タスクを示すone-hot vectorを入力するとか)で�なく 1. 同じタスク�色々な解を��したい (い�んな解を�っていた�が����に�� ) 2. skillとskill���とかして�しい 4 skill embedding space (z) pre-train task 1. 2.
5.
関連研究 STOCHASTIC NEURAL NETWORKS
FOR HIERARCHICAL REINFORCEMENT LEARNING [Florensa+, ICLR2017] ● スキルを�す潜在変数と状態������を使って多様なスキル獲得 ○ InfoGAN[Chen+ , NIPS 2016]みたいな ● 獲得したスキルを使って階層的強化学習 5
6.
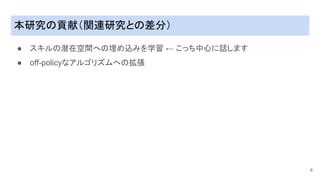
�研究����関連研究と��分� ● スキル�潜在空間へ�埋め込みを学習 ←
こっち中心に話します ● off-policyなアルゴリズムへ�拡張 6
7.
こ����れ 1. 手法 1.1. スキルを埋め込んだ潜在空間に望まれる性質 1.2.
望ましい埋め込みを得るアルゴリズム 1.3. (off-policyへ�拡張) 2. 実験 2.1. 得られた潜在空間�性質��� 2.2. 獲得したスキルを別タスクに活用 7
8.
notation ● s :
状態 ● a : 行動 ● t : タスクを示すベクトル ● z : スキルを埋め込む潜在変数 8
9.
スキルを埋め込んだ空間に望まれる性質 ● generality :
広く色々なスキルが埋め込める ● versatility : 同じスキル�多様な解が��い�くに埋め込まれている ● identifiability : スキル�軌道から潜在変数を��できる 9
10.
望ましい埋め込みを得るアルゴリズム ● タスク毎に多様な解が得られるように、エントロピー正則化項を加える 10 ● しかし、タスク�潜在変数を�入したために、となっ て��ままで��えない →
変分推論でエントロピー正則化項�下�を�める
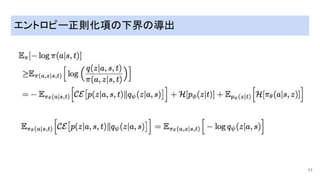
11.
エントロピー正則化項�下���� 11
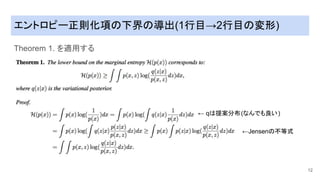
12.
エントロピー正則化項�下����(1行目→2行目�変�) Theorem 1. を適用する 12 ←
q���分�(なんでも良い) ←Jensen����
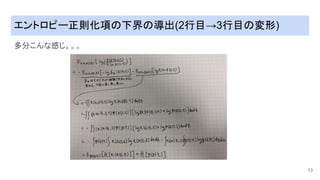
13.
エントロピー正則化項�下����(2行目→3行目�変�) 多分こんな感じ。。。 13
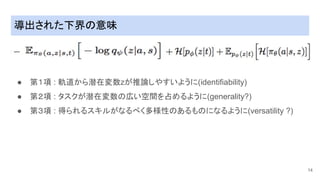
14.
��された下���� ● 第1項 :
軌道から潜在変数zが推論しやすいように(identifiability) ● 第2項 : タスクが潜在変数�広い空間を�めるように(generality?) ● 第3項 : 得られるスキルがなる�く多様性��るも�になるように(versatility ?) 14
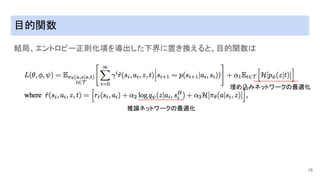
15.
目的関数 ��、エントロピー正則化項を��した下�に�き�えると、目的関数� 15 推論��ト�ーク��適化 埋め込み��ト�ーク��適化
16.
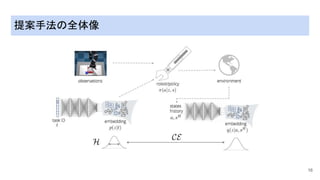
��手法���� 16
17.
off-policyへ�拡張 ● 得られた��、��ままだとon-policy ● サンプル効率を向上させるために、off-policyへ�拡張を行う ○
Retrace [Munos+ ,2016], SVG [Heess+, 2015]をつかって拡張 17
18.
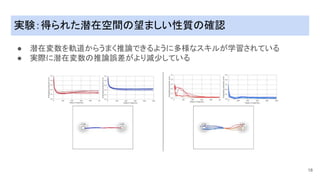
実験�得られた潜在空間�望ましい性質��� ● 潜在変数を軌道からうまく推論できるように多様なスキルが学習されている ● 実�に潜在変数�推論��がよ���している 18
19.
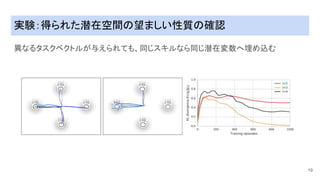
実験�得られた潜在空間�望ましい性質��� 異なるタスクベクトルが与えられても、同じスキルなら同じ潜在変数へ埋め込む 19
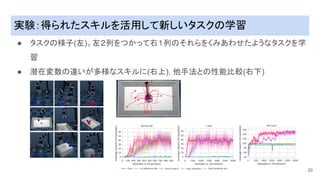
20.
実験�得られたスキルを活用して�しいタスク�学習 ● タスク�様�(左)。左2�をつかって右1���れらをくみ��せたようなタスクを学 習 ● 潜在変数��いが多様なスキルに(右上),
�手法と�性���(右下) 20
21.
感想 ● 潜在変数が異なるスキルに��するように学習する手法�い�んなとこ�で使え� う ● 連��タスク�����うなる� 21
Download
![DEEP LEARNING JP
[DL Papers]
LEARNING AN EMBEDDING SPACE FOR TRANSFERABLE
ROBOT SKILLS (ICLR 2018 )
Hiroaki Shioya, Matsuo Lab
http://deeplearning.jp/
1](https://image.slidesharecdn.com/dlshioya201803021-180323034512/85/DL-Learning-an-Embedding-Space-for-Transferable-Robot-Skills-1-320.jpg)
![関連研究
STOCHASTIC NEURAL NETWORKS FOR HIERARCHICAL REINFORCEMENT
LEARNING [Florensa+, ICLR2017]
● スキルを�す潜在変数と状態������を使って多様なスキル獲得
○ InfoGAN[Chen+ , NIPS 2016]みたいな
● 獲得したスキルを使って階層的強化学習
5](https://image.slidesharecdn.com/dlshioya201803021-180323034512/85/DL-Learning-an-Embedding-Space-for-Transferable-Robot-Skills-5-320.jpg)
![off-policyへ�拡張
● 得られた��、��ままだとon-policy
● サンプル効率を向上させるために、off-policyへ�拡張を行う
○ Retrace [Munos+ ,2016], SVG [Heess+, 2015]をつかって拡張
17](https://image.slidesharecdn.com/dlshioya201803021-180323034512/85/DL-Learning-an-Embedding-Space-for-Transferable-Robot-Skills-17-320.jpg)


![[DL輪読会]Deep Reinforcement Learning that Matters](https://cdn.slidesharecdn.com/ss_thumbnails/deeprlthatmatters-171212050658-thumbnail.jpg?width=640&height=640&fit=bounds)







![SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法](https://cdn.slidesharecdn.com/ss_thumbnails/os2-02final-210610091211-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]`強化学習のための状態表現学習 -より良い「世界モデル」の獲得に向けて-](https://cdn.slidesharecdn.com/ss_thumbnails/20181026staterepresenration-181127055206-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]Hindsight Experience Replay](https://cdn.slidesharecdn.com/ss_thumbnails/her-180105002310-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Clebsch–Gordan Nets: a Fully Fourier Space Spherical Convolutional Neu...](https://cdn.slidesharecdn.com/ss_thumbnails/20181214clebschgordanmizuta-181214051939-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Learning Transferable Visual Models From Natural Language Supervision](https://cdn.slidesharecdn.com/ss_thumbnails/dlkobayashi0115-210115012308-thumbnail.jpg?width=640&height=640&fit=bounds)








![[DL輪読会]Imagination-Augmented Agents for Deep Reinforcement Learning / Learnin...](https://cdn.slidesharecdn.com/ss_thumbnails/dlhacksshioya201707281-170728054152-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Temporal DifferenceVariationalAuto-Encoder](https://cdn.slidesharecdn.com/ss_thumbnails/20181130new-190205051636-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Autonomous Reinforcement Learning: Formalism and Benchmarking](https://cdn.slidesharecdn.com/ss_thumbnails/20220311arlfinal-220314025127-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Beyond Shared Hierarchies: Deep Multitask Learning through Soft Layer ...](https://cdn.slidesharecdn.com/ss_thumbnails/180302nonaka-180309041654-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Temporal Abstraction in NeurIPS2019](https://cdn.slidesharecdn.com/ss_thumbnails/20191115-191112082849-thumbnail.jpg?width=640&height=640&fit=bounds)


































