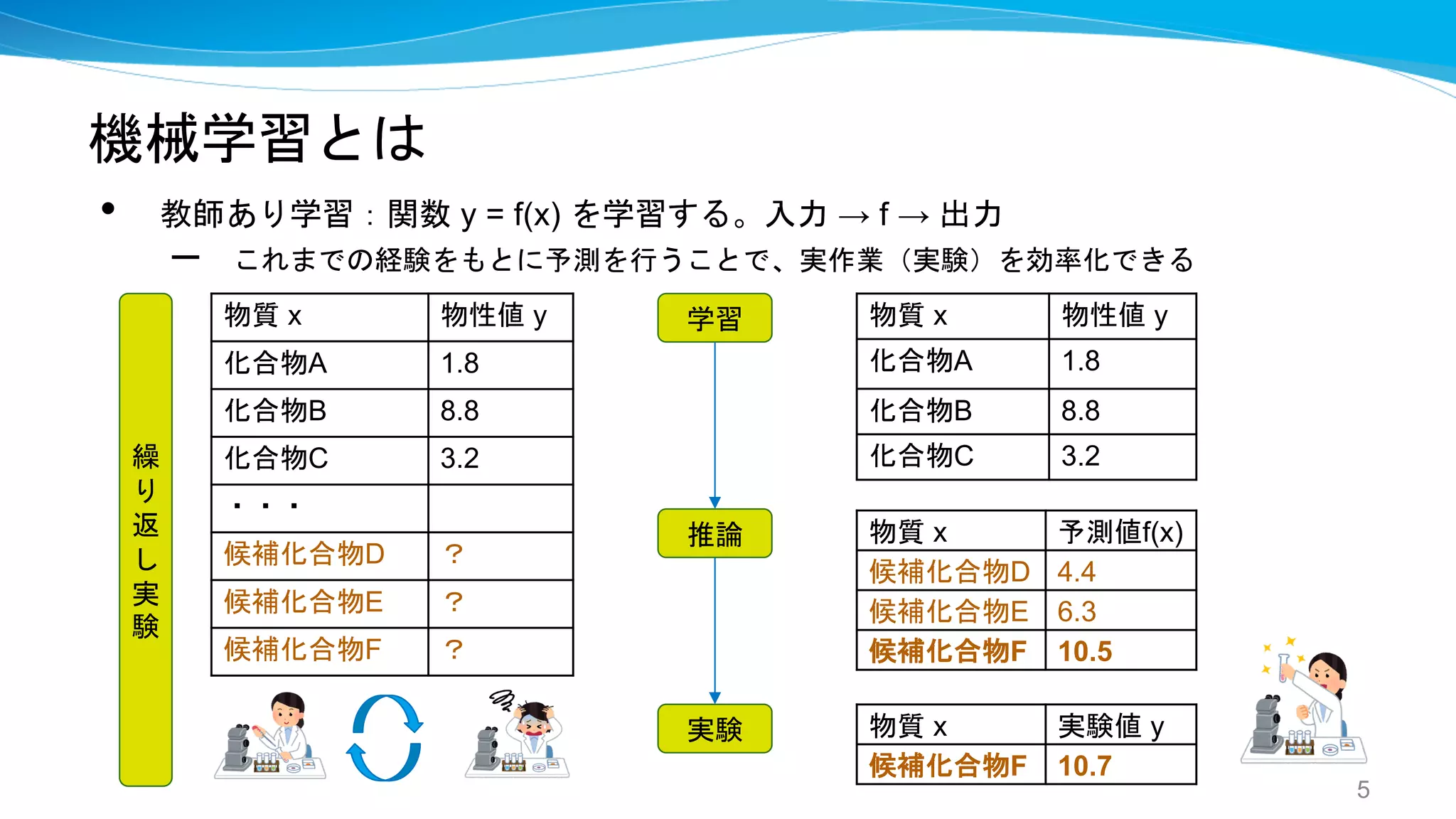
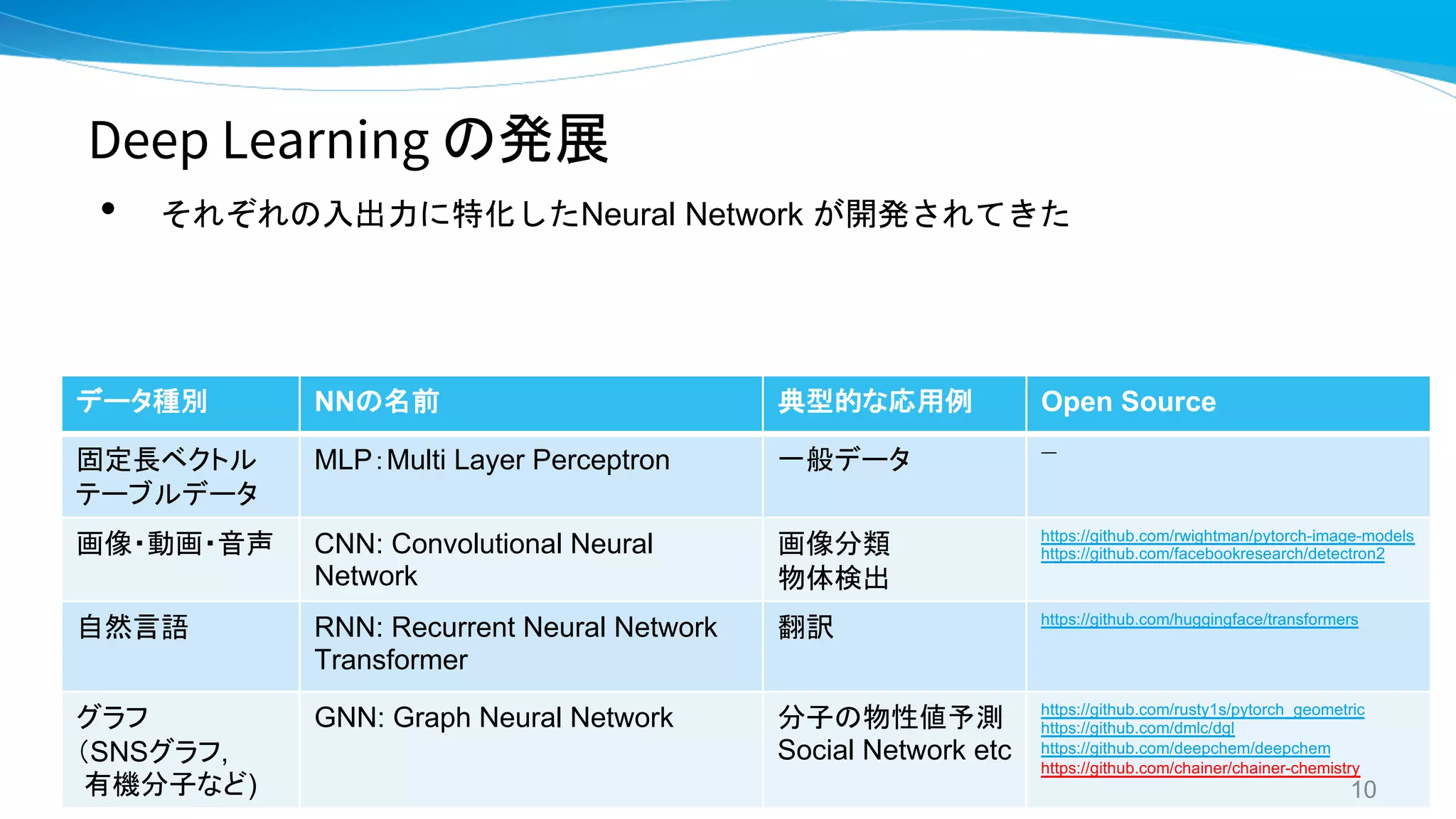
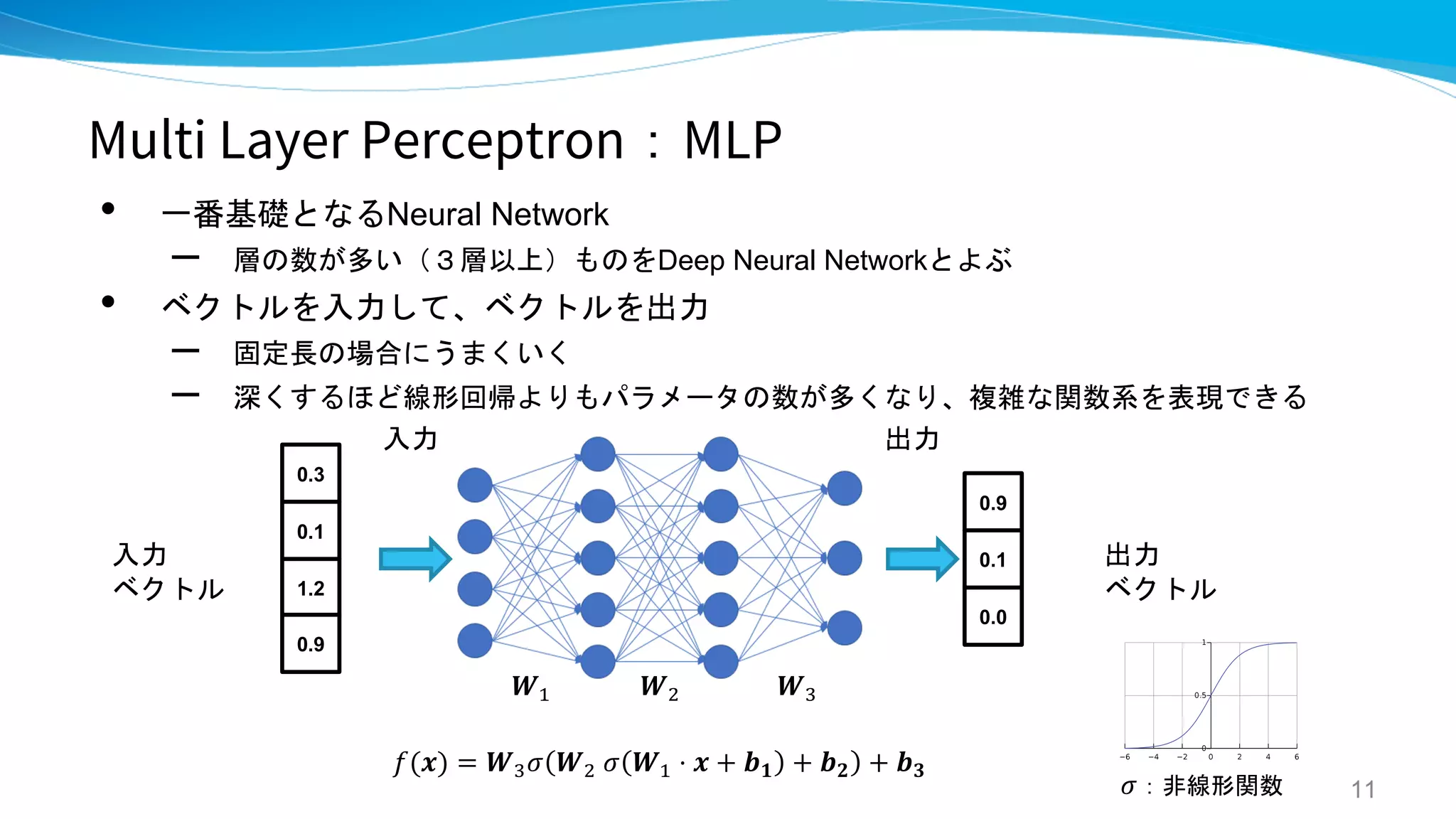
機械学習とは
• 教師あり学習:関数 y= f(x) を学習する。入力 → f → 出力
– これまでの経験をもとに予測を行うことで、実作業(実験)を効率化できる
5
物質 x 物性値 y
化合物A 1.8
化合物B 8.8
化合物C 3.2
・・・
候補化合物D ?
候補化合物E ?
候補化合物F ?
繰
り
返
し
実
験
物質 x 予測値f(x)
候補化合物D 4.4
候補化合物E 6.3
候補化合物F 10.5
物質 x 物性値 y
化合物A 1.8
化合物B 8.8
化合物C 3.2
推論
学習
実験 物質 x 実験値 y
候補化合物F 10.7
6.
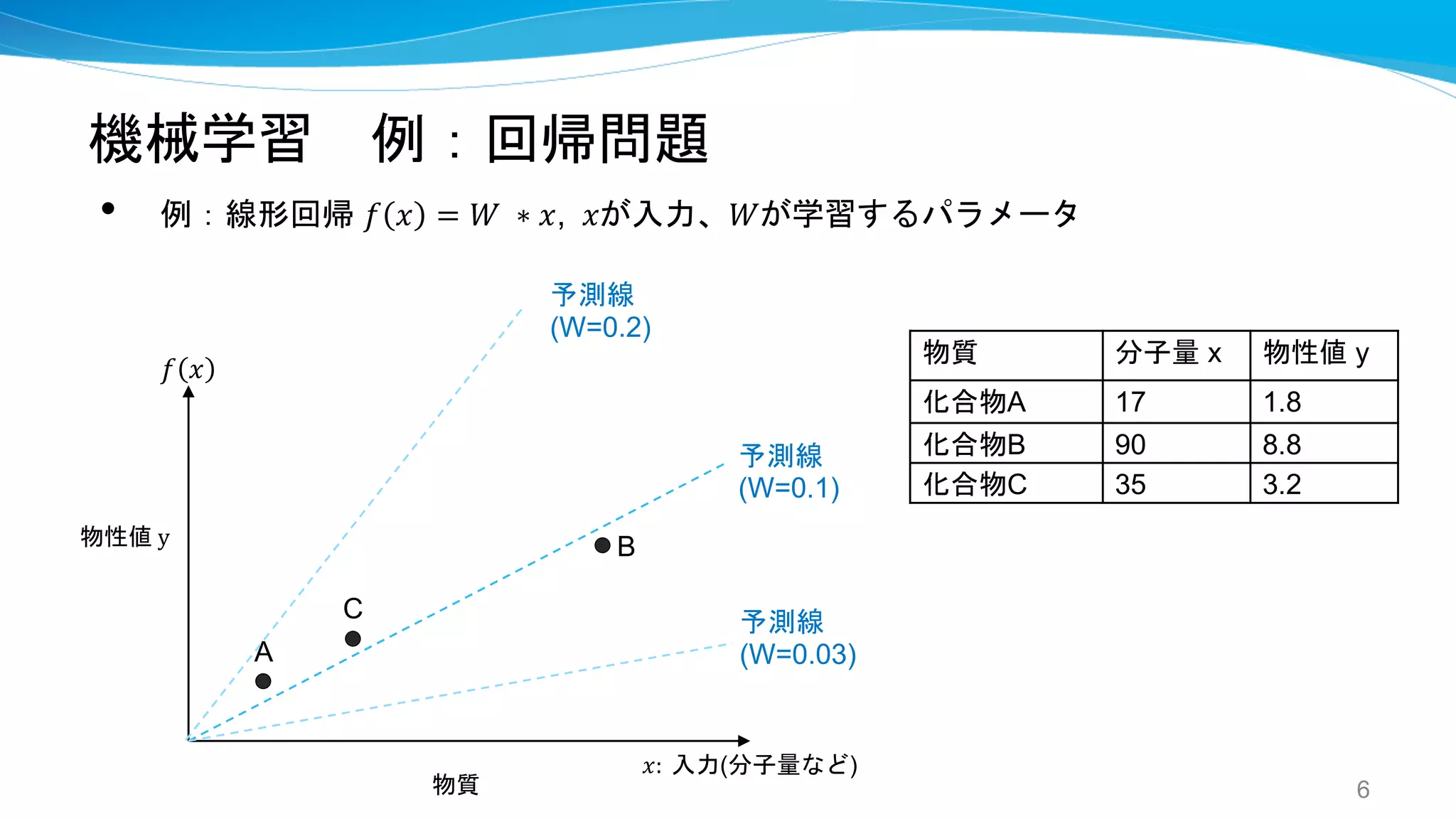
機械学習 例:回帰問題
• 例:線形回帰𝑓 𝑥 = 𝑊 ∗ 𝑥, 𝑥が入力、𝑊が学習するパラメータ
6
𝑥: 入力(分子量など)
𝑓 𝑥
予測線
(W=0.1)
A
C
B
物質 分子量 x 物性値 y
化合物A 17 1.8
化合物B 90 8.8
化合物C 35 3.2
物質
物性値 y
予測線
(W=0.2)
予測線
(W=0.03)
7.
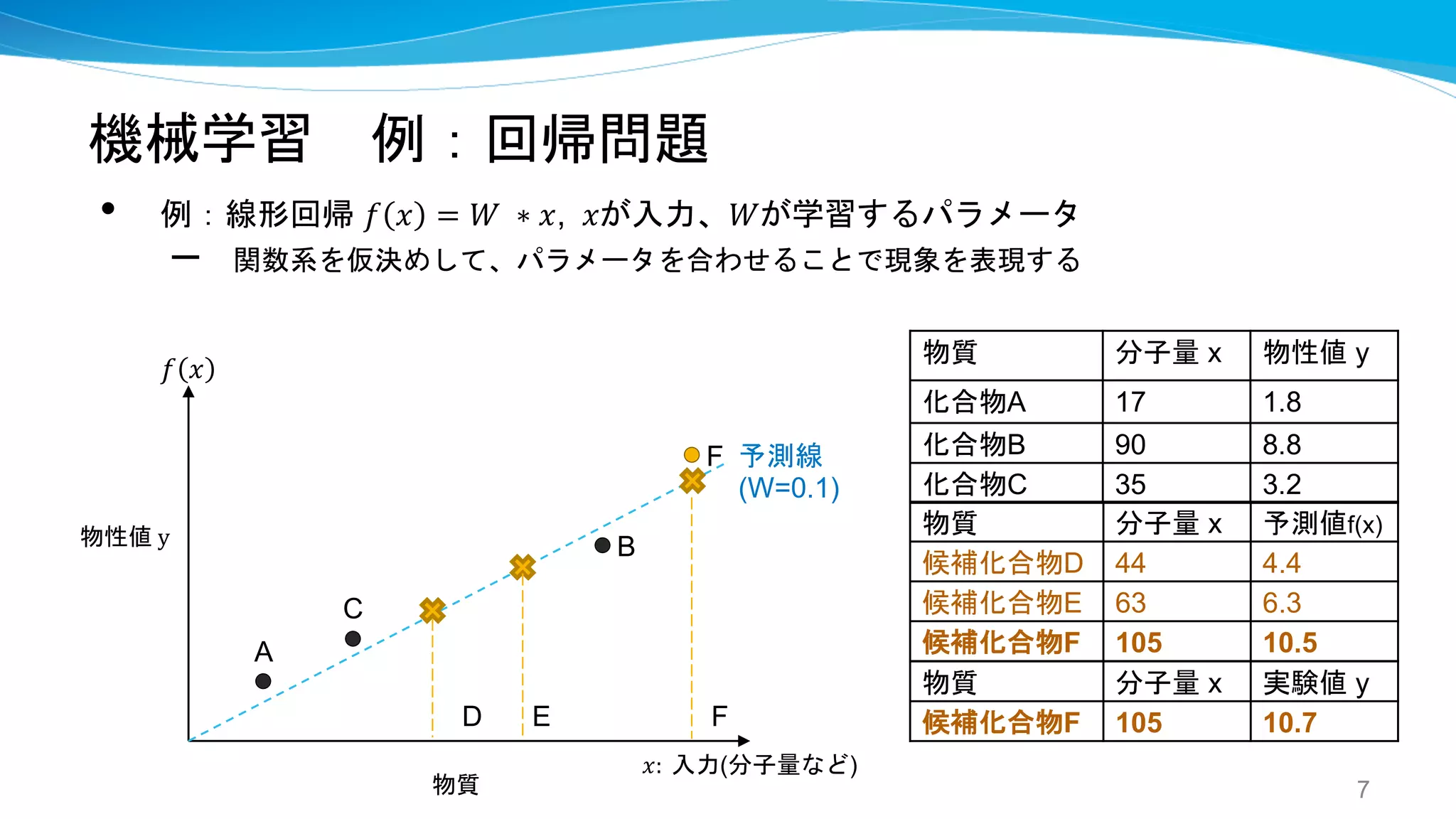
機械学習 例:回帰問題
• 例:線形回帰𝑓 𝑥 = 𝑊 ∗ 𝑥, 𝑥が入力、𝑊が学習するパラメータ
– 関数系を仮決めして、パラメータを合わせることで現象を表現する
7
物質 分子量 x 予測値f(x)
候補化合物D 44 4.4
候補化合物E 63 6.3
候補化合物F 105 10.5
物質 分子量 x 物性値 y
化合物A 17 1.8
化合物B 90 8.8
化合物C 35 3.2
物質 分子量 x 実験値 y
候補化合物F 105 10.7
𝑥: 入力(分子量など)
𝑓 𝑥
予測線
(W=0.1)
A
C
B
F
E F
D
物質
物性値 y
自然言語処理 (NLP) 分野でのDeeplearningの発展
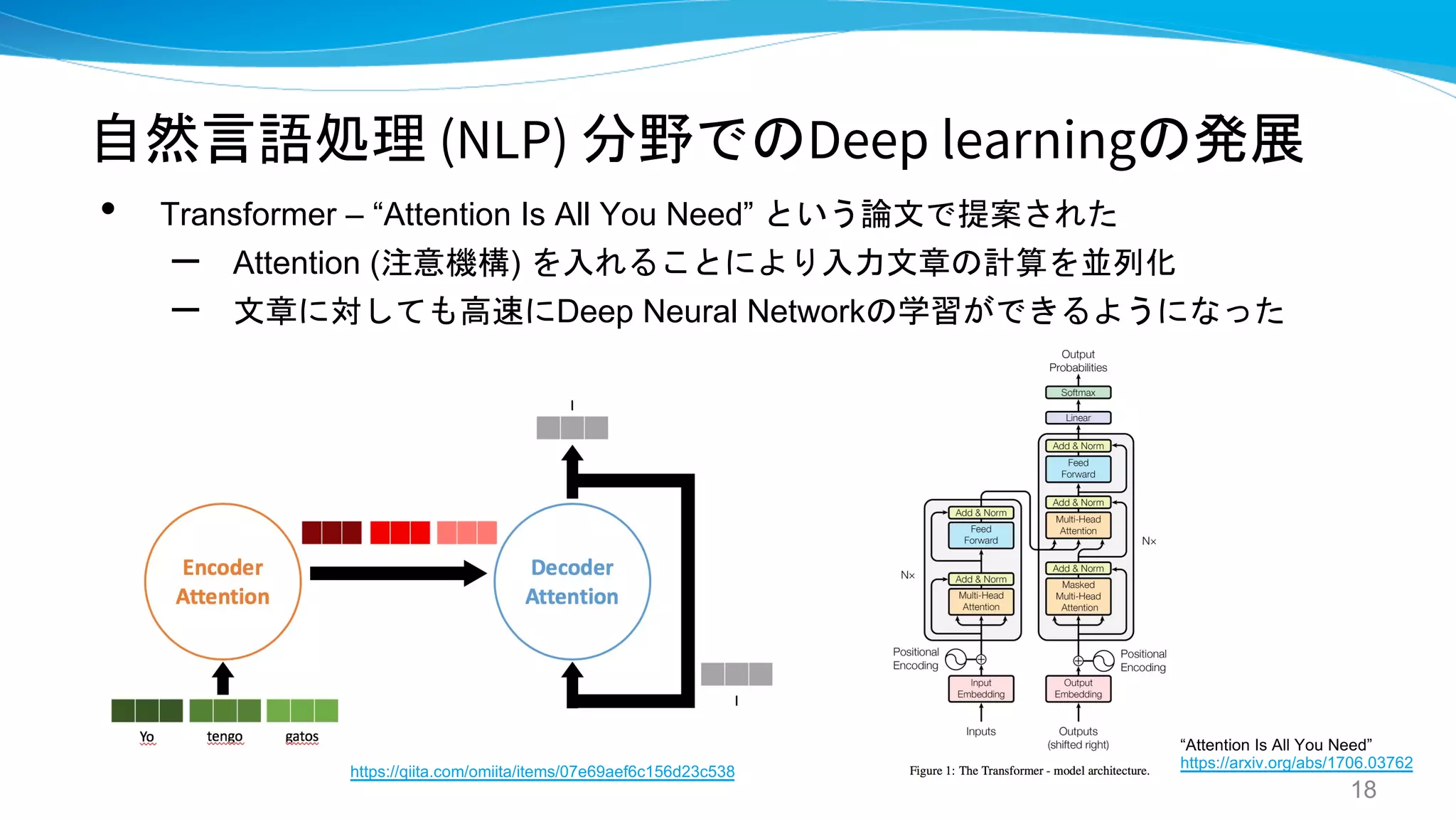
• Transformer – “Attention Is All You Need” という論文で提案された
– Attention (注意機構) を入れることにより入力文章の計算を並列化
– 文章に対しても高速にDeep Neural Networkの学習ができるようになった
18
https://qiita.com/omiita/items/07e69aef6c156d23c538
“Attention Is All You Need”
https://arxiv.org/abs/1706.03762
19.
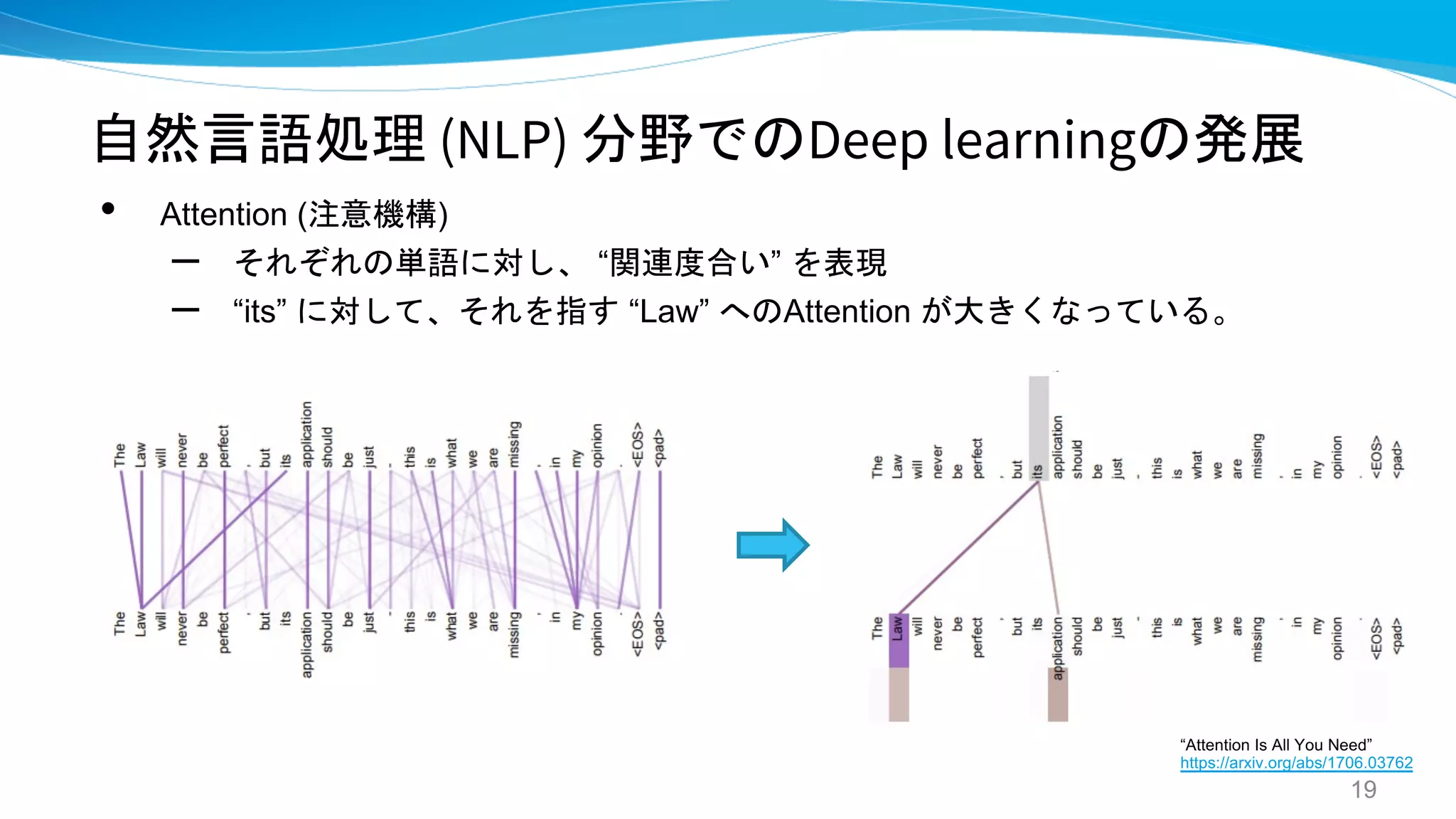
自然言語処理 (NLP) 分野でのDeeplearningの発展
• Attention (注意機構)
– それぞれの単語に対し、 “関連度合い” を表現
– “its” に対して、それを指す “Law” へのAttention が大きくなっている。
19
“Attention Is All You Need”
https://arxiv.org/abs/1706.03762
20.
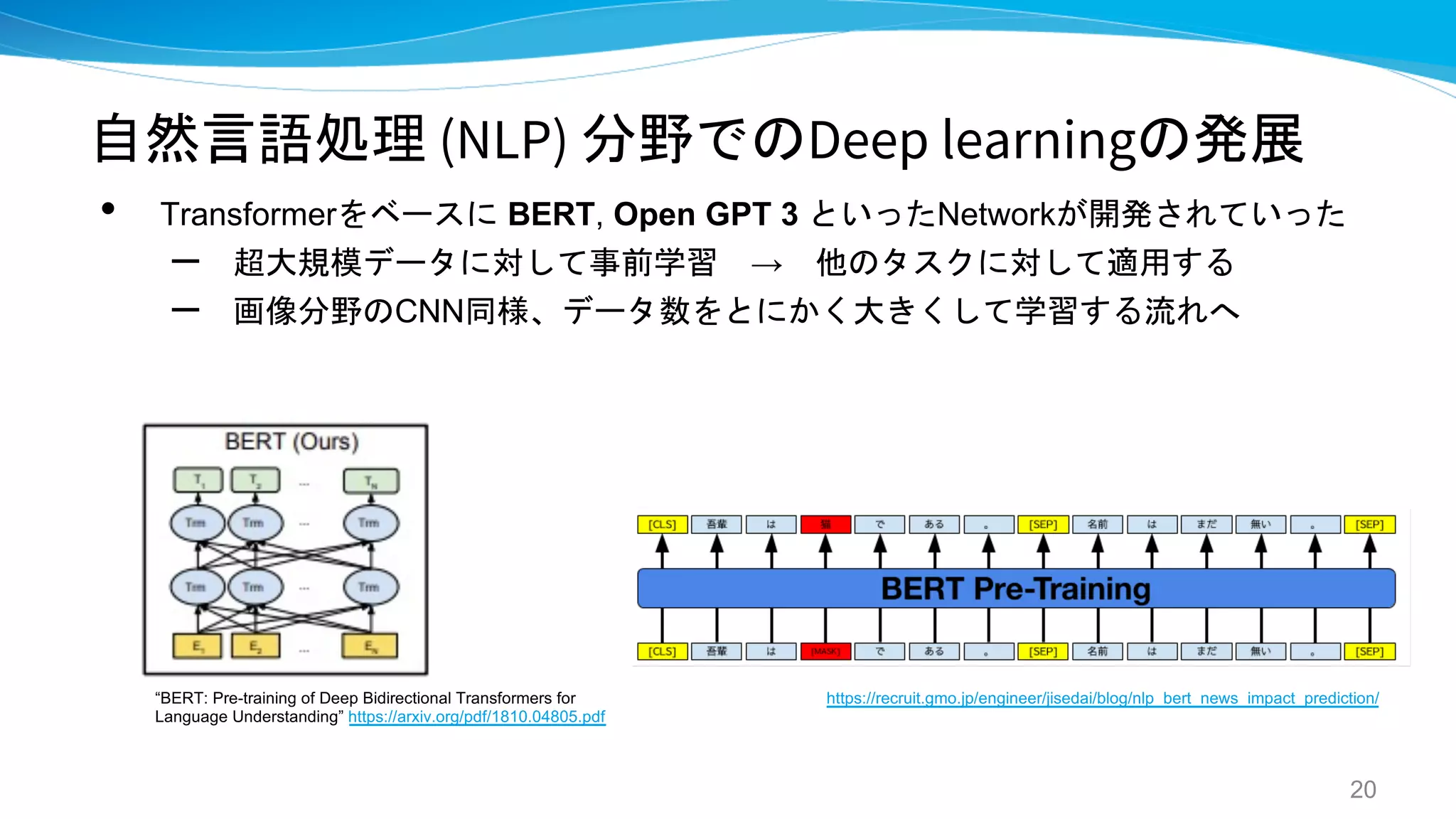
自然言語処理 (NLP) 分野でのDeeplearningの発展
• Transformerをベースに BERT, Open GPT 3 といったNetworkが開発されていった
– 超大規模データに対して事前学習 → 他のタスクに対して適用する
– 画像分野のCNN同様、データ数をとにかく大きくして学習する流れへ
20
https://recruit.gmo.jp/engineer/jisedai/blog/nlp_bert_news_impact_prediction/
“BERT: Pre-training of Deep Bidirectional Transformers for
Language Understanding” https://arxiv.org/pdf/1810.04805.pdf
21.
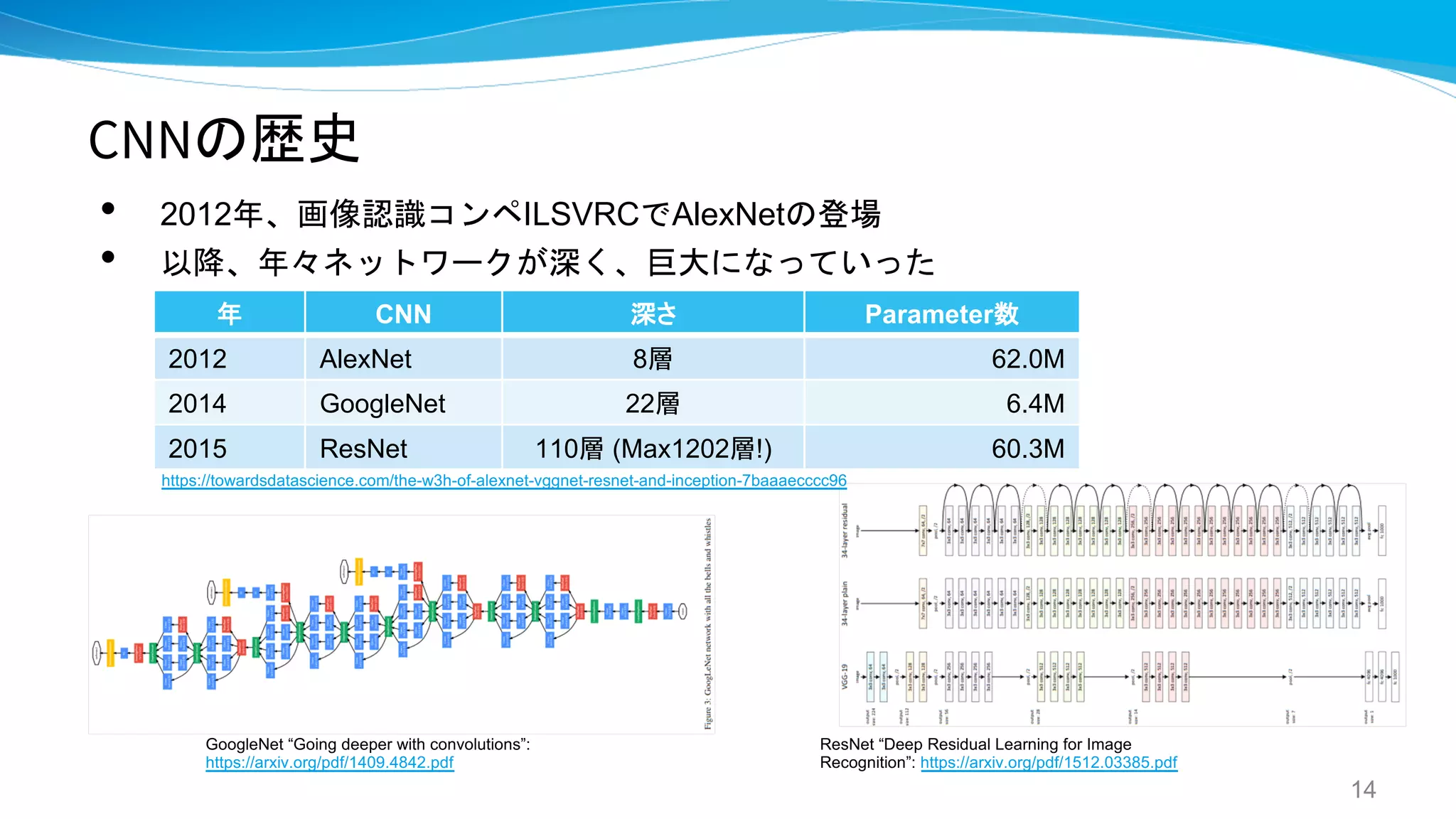
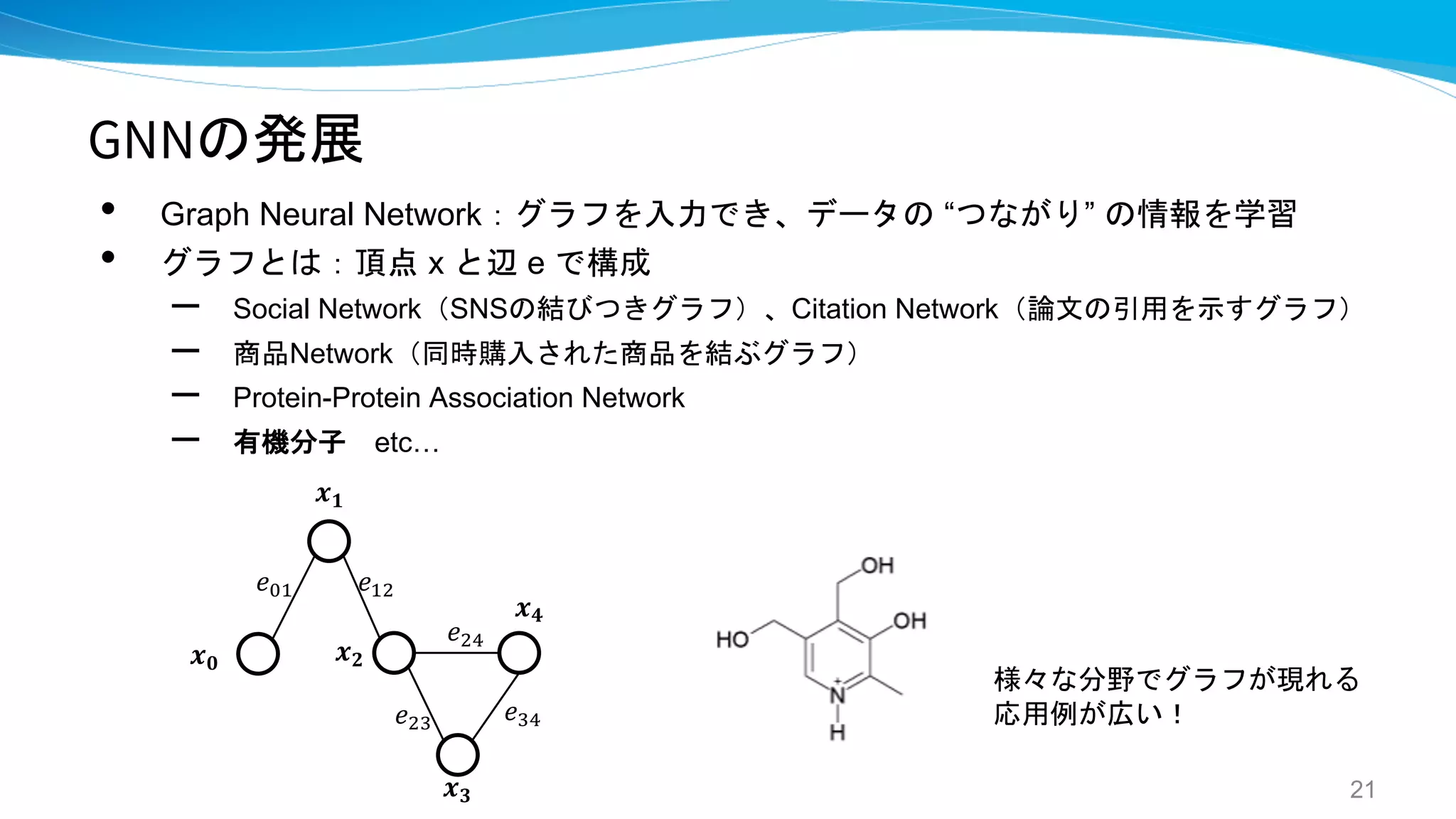
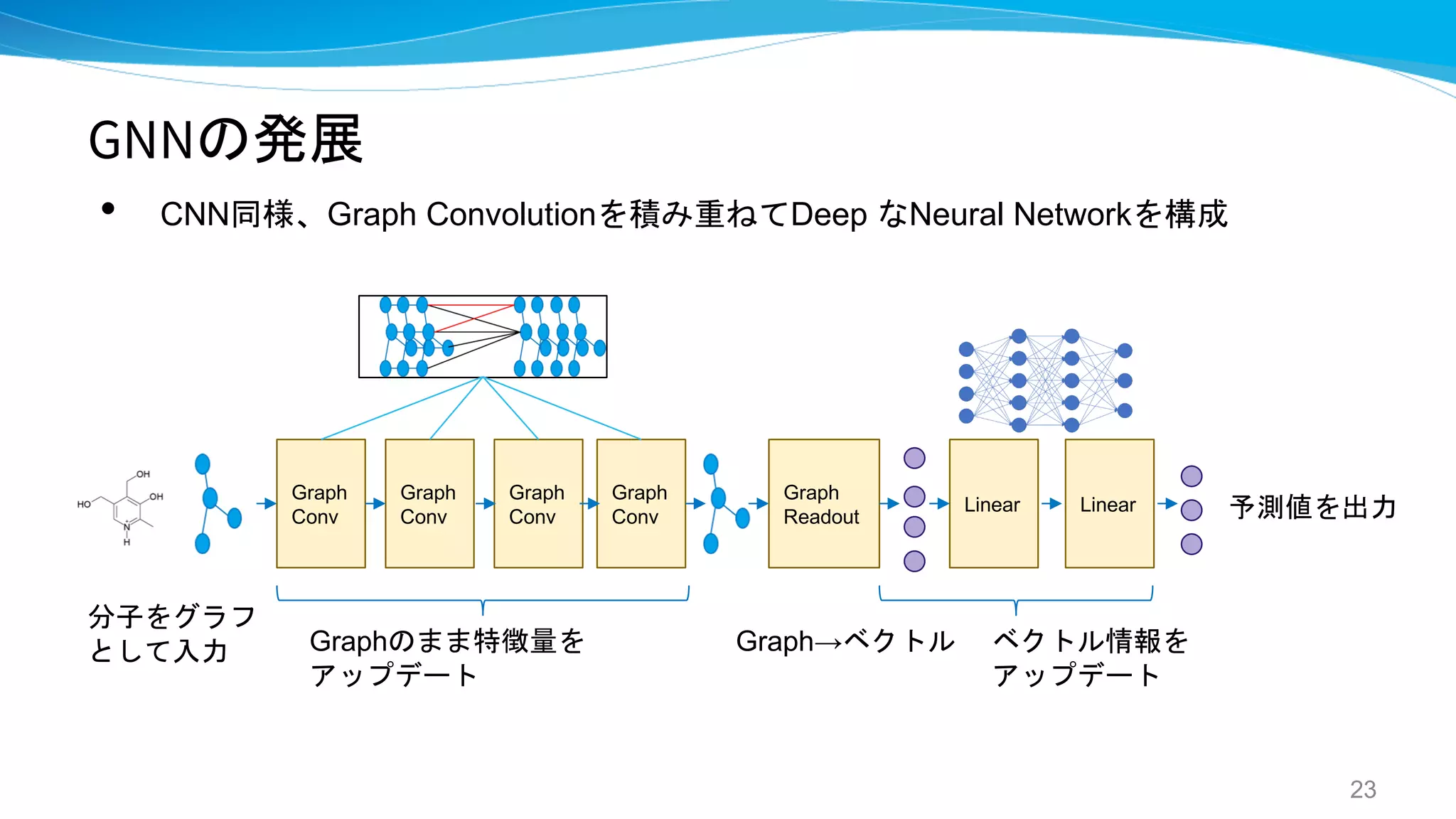
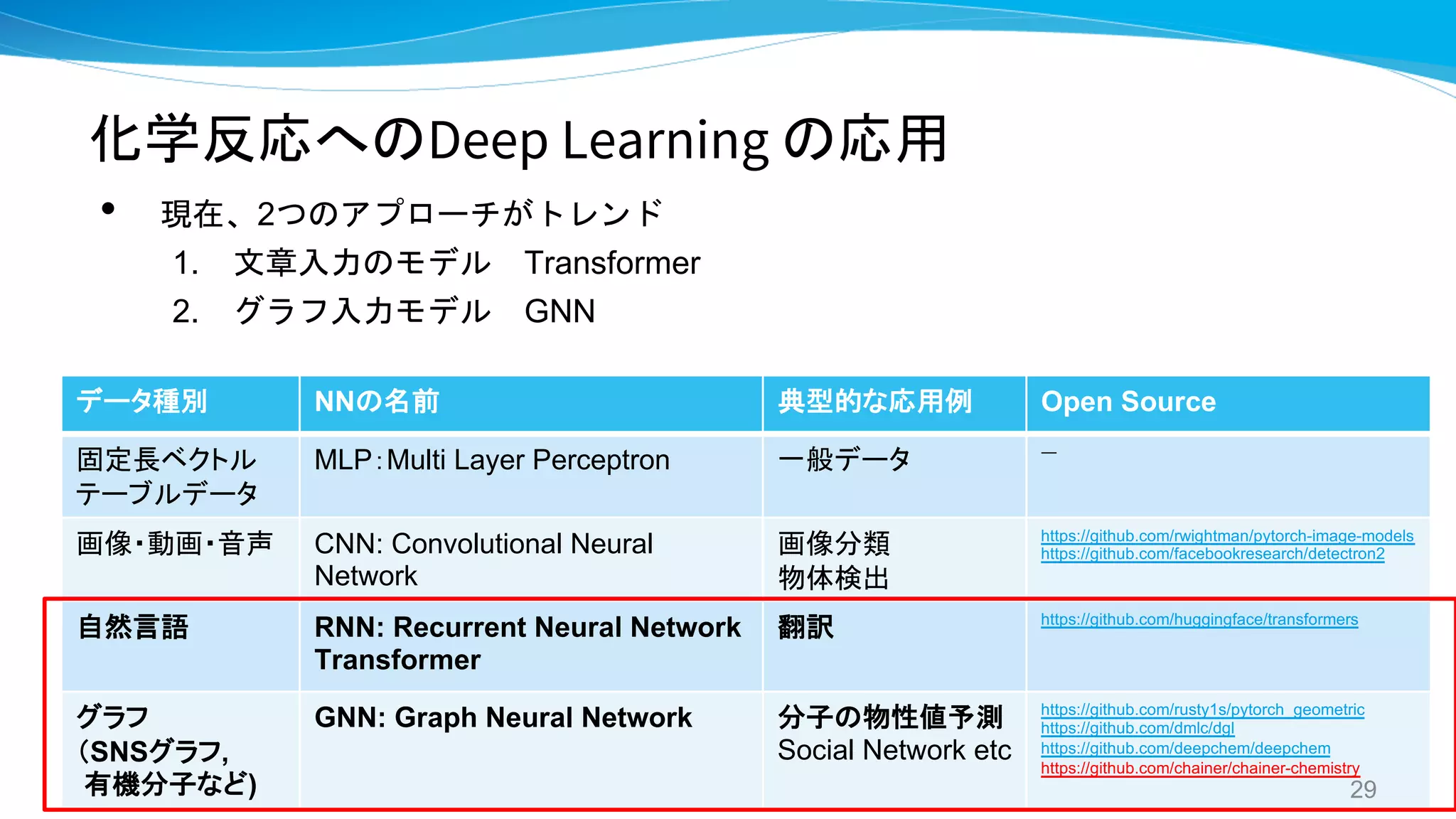
GNNの発展
• Graph NeuralNetwork:グラフを入力でき、データの “つながり” の情報を学習
• グラフとは:頂点 x と辺 e で構成
– Social Network(SNSの結びつきグラフ)、Citation Network(論文の引用を示すグラフ)
– 商品Network(同時購入された商品を結ぶグラフ)
– Protein-Protein Association Network
– 有機分子 etc…
21
𝒙𝟎
𝒙𝟏
𝒙𝟐
𝒙𝟒
𝒙𝟑
𝑒)! 𝑒!"
𝑒"*
𝑒#*
𝑒"#
様々な分野でグラフが現れる
応用例が広い!
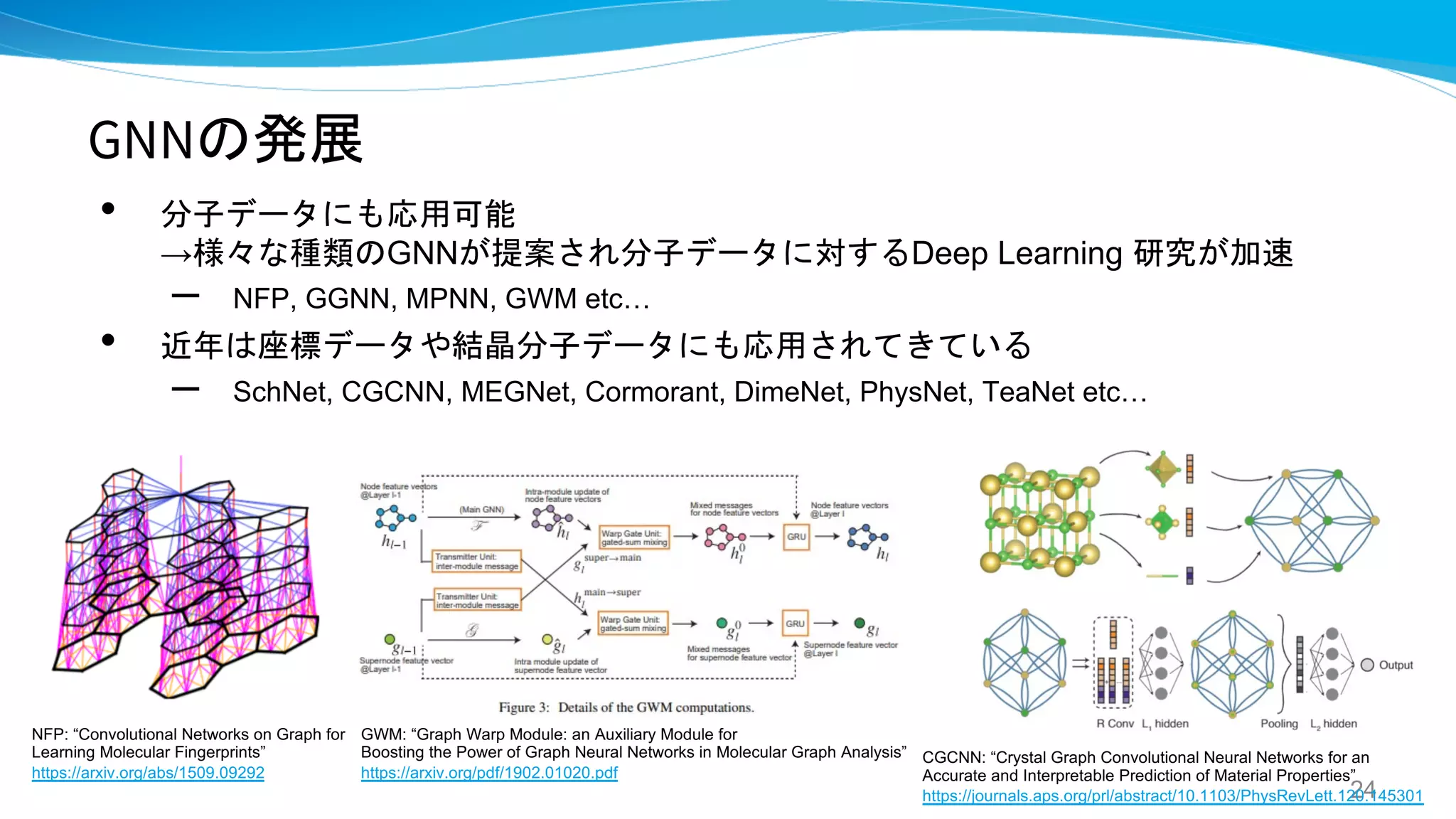
GNNの発展
• 分子データにも応用可能
→様々な種類のGNNが提案され分子データに対するDeep Learning研究が加速
– NFP, GGNN, MPNN, GWM etc…
• 近年は座標データや結晶分子データにも応用されてきている
– SchNet, CGCNN, MEGNet, Cormorant, DimeNet, PhysNet, TeaNet etc…
24
NFP: “Convolutional Networks on Graph for
Learning Molecular Fingerprints”
https://arxiv.org/abs/1509.09292
GWM: “Graph Warp Module: an Auxiliary Module for
Boosting the Power of Graph Neural Networks in Molecular Graph Analysis”
https://arxiv.org/pdf/1902.01020.pdf
CGCNN: “Crystal Graph Convolutional Neural Networks for an
Accurate and Interpretable Prediction of Material Properties”
https://journals.aps.org/prl/abstract/10.1103/PhysRevLett.120.145301
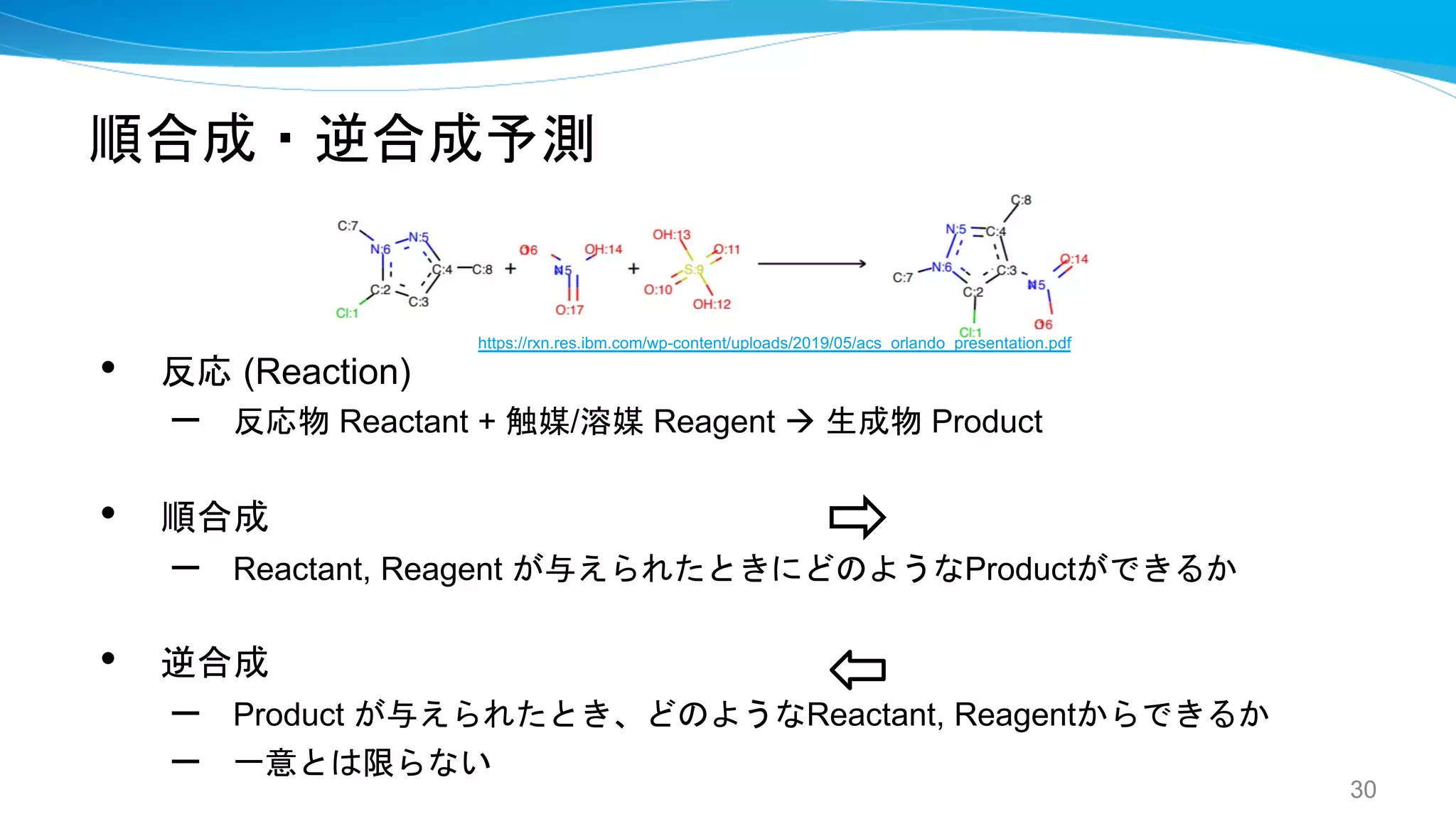
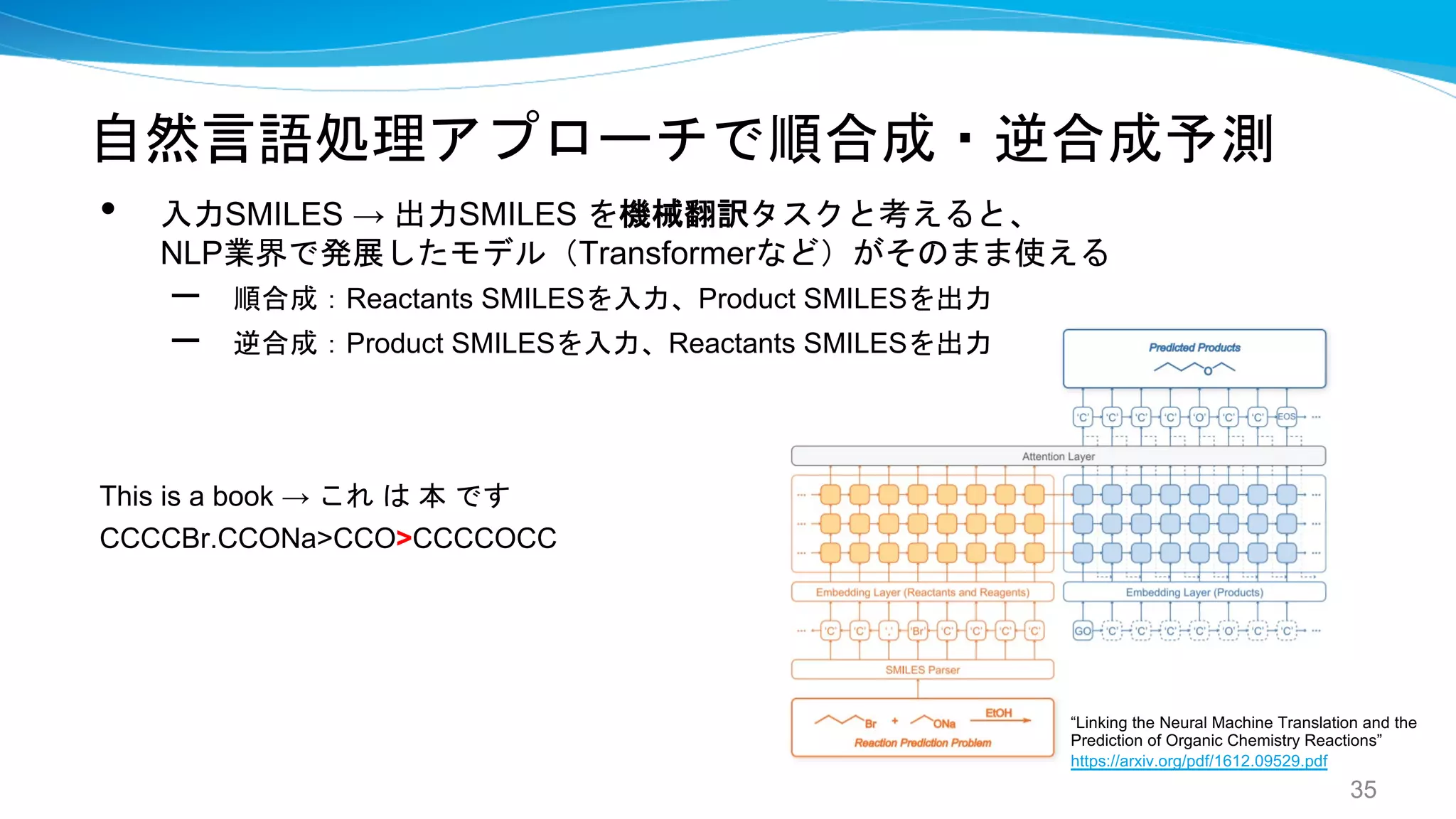
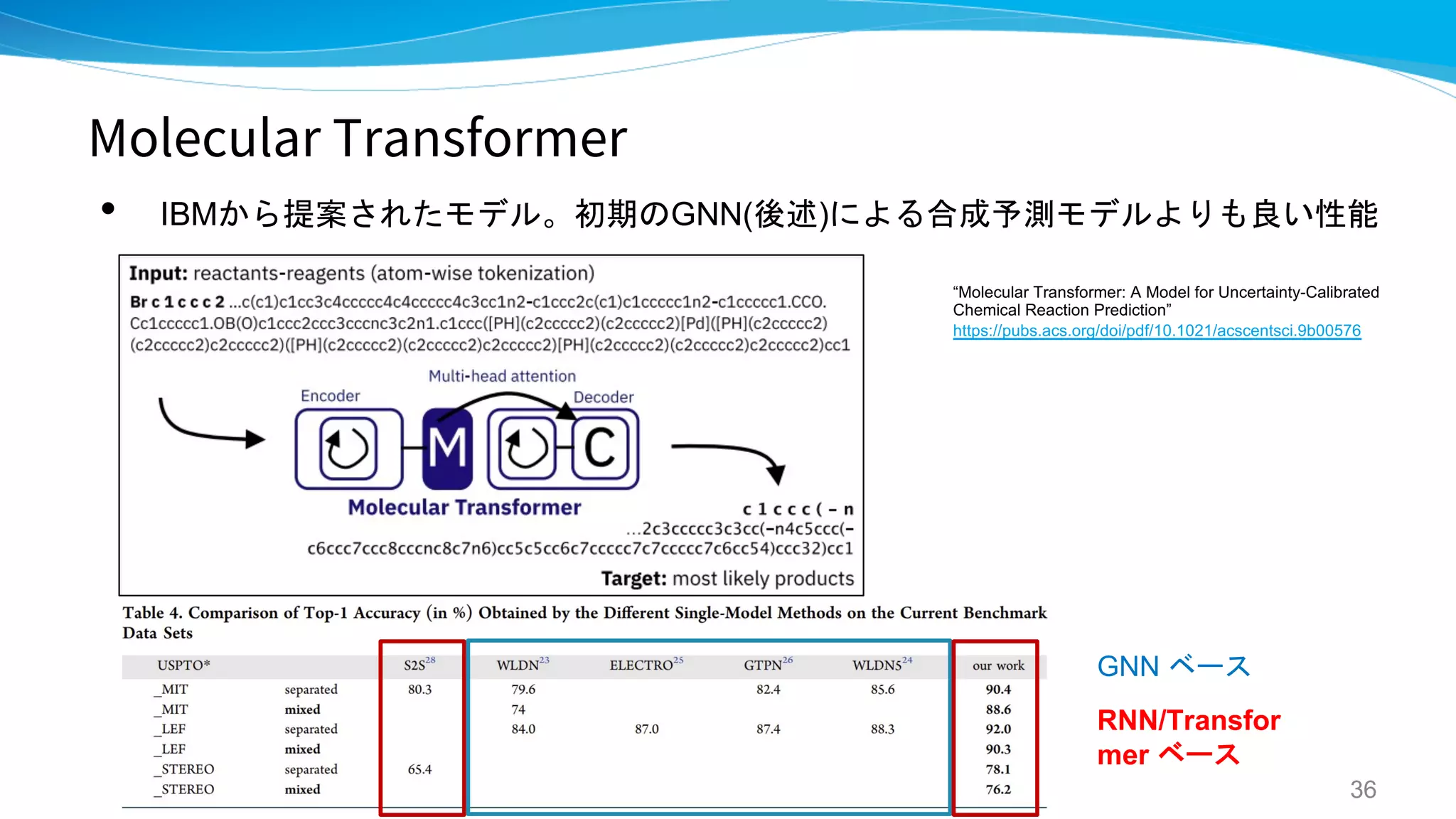
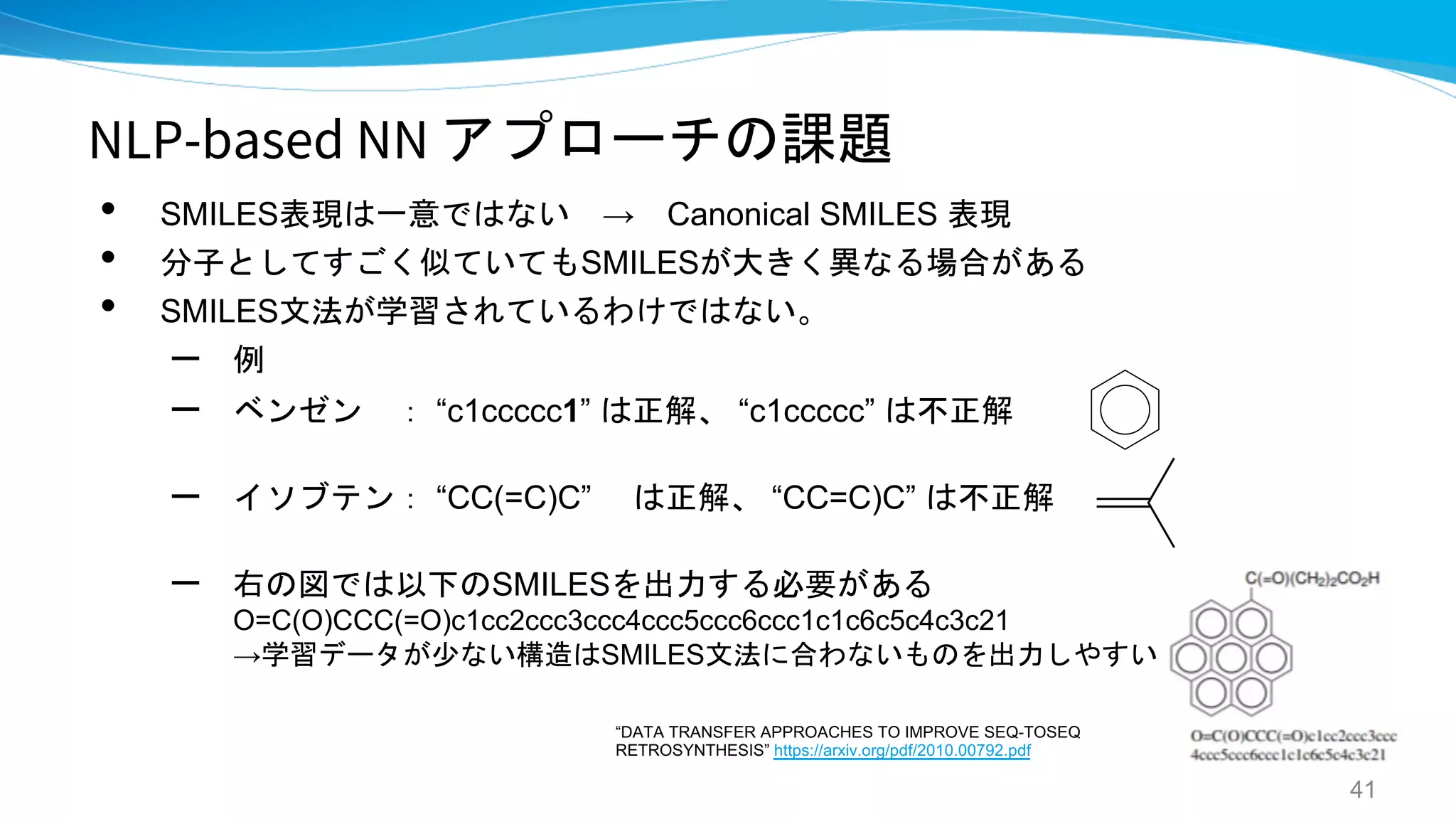
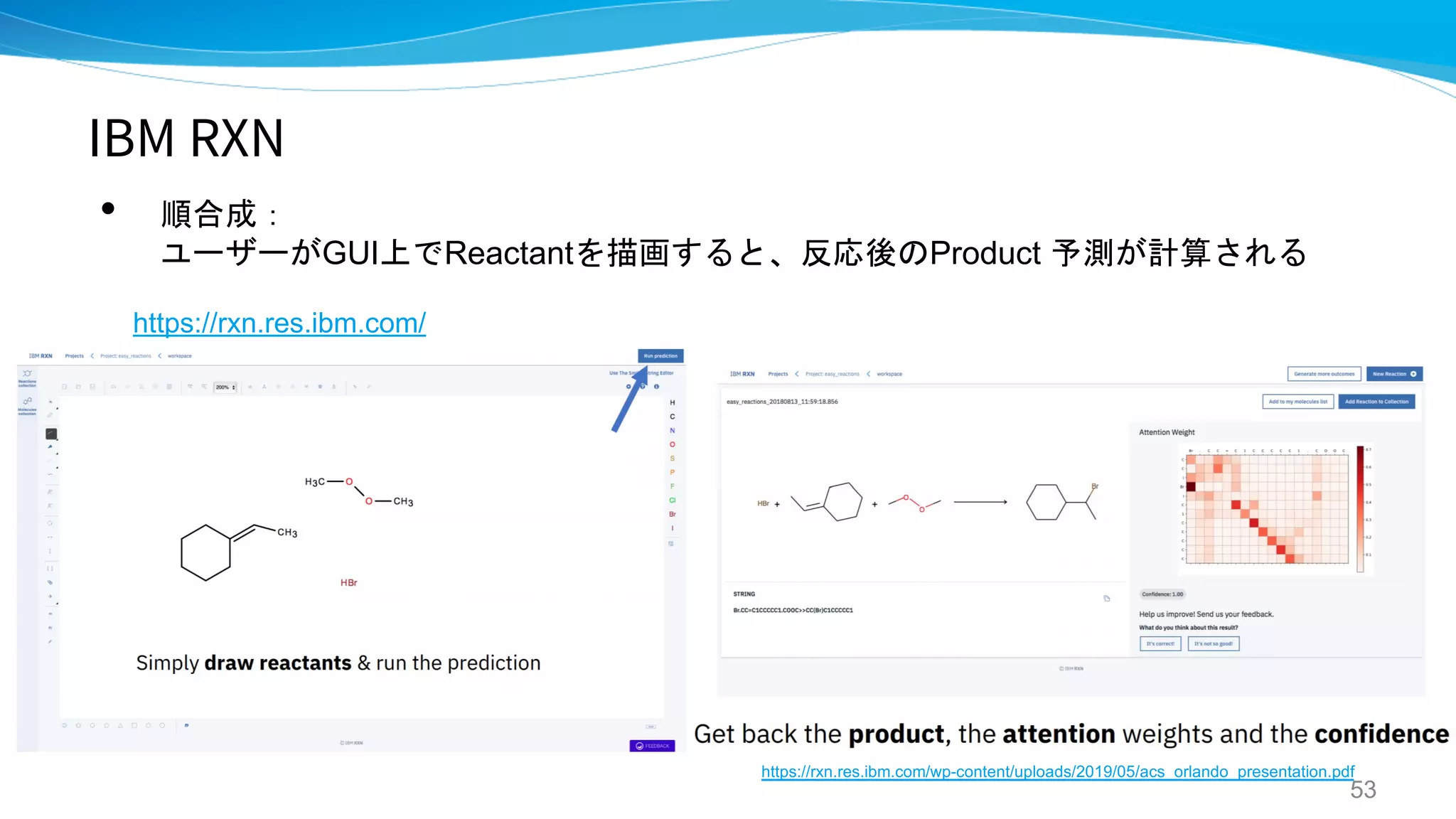
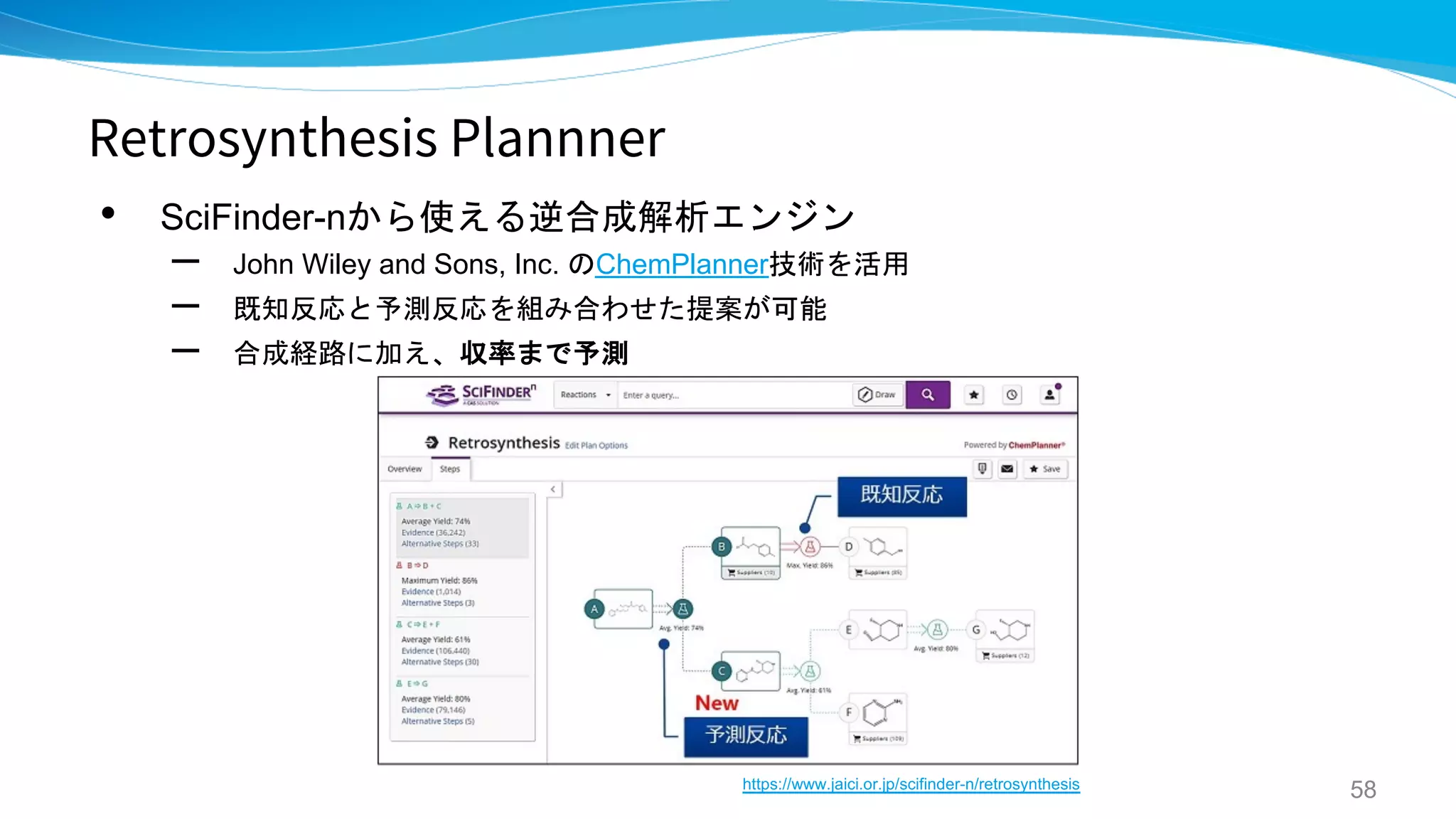
自然言語処理アプローチで順合成・逆合成予測
• 入力SMILES →出力SMILES を機械翻訳タスクと考えると、
NLP業界で発展したモデル(Transformerなど)がそのまま使える
– 順合成:Reactants SMILESを入力、Product SMILESを出力
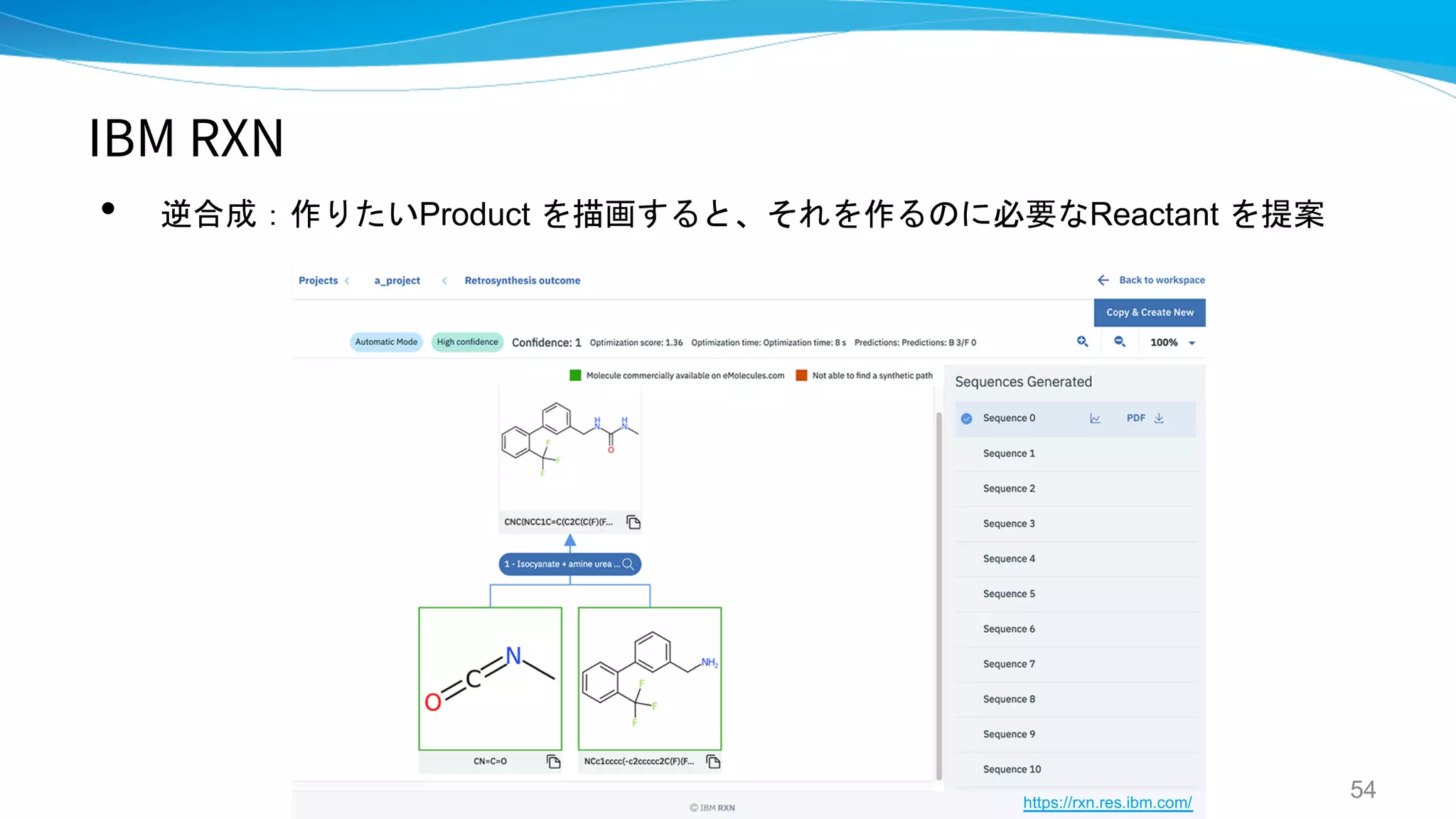
– 逆合成:Product SMILESを入力、Reactants SMILESを出力
35
“Linking the Neural Machine Translation and the
Prediction of Organic Chemistry Reactions”
https://arxiv.org/pdf/1612.09529.pdf
This is a book → これ は 本 です
CCCCBr.CCONa>CCO>CCCCOCC
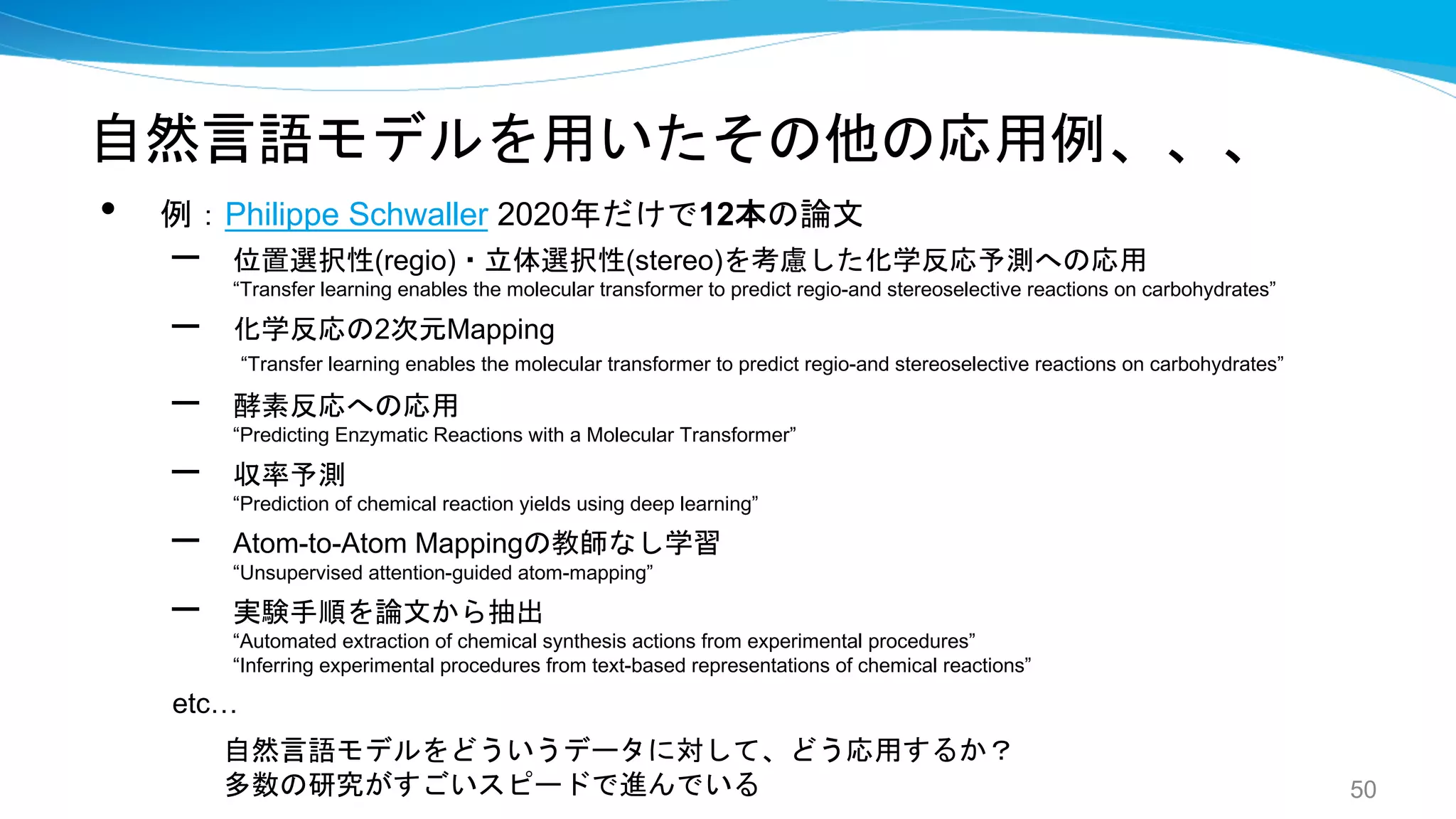
自然言語モデルを用いたその他の応用例、、、
• 例:Philippe Schwaller2020年だけで12本の論文
– 位置選択性(regio)・立体選択性(stereo)を考慮した化学反応予測への応用
“Transfer learning enables the molecular transformer to predict regio-and stereoselective reactions on carbohydrates”
– 化学反応の2次元Mapping
“Transfer learning enables the molecular transformer to predict regio-and stereoselective reactions on carbohydrates”
– 酵素反応への応用
“Predicting Enzymatic Reactions with a Molecular Transformer”
– 収率予測
“Prediction of chemical reaction yields using deep learning”
– Atom-to-Atom Mappingの教師なし学習
“Unsupervised attention-guided atom-mapping”
– 実験手順を論文から抽出
“Automated extraction of chemical synthesis actions from experimental procedures”
“Inferring experimental procedures from text-based representations of chemical reactions”
etc…
50
自然言語モデルをどういうデータに対して、どう応用するか?
多数の研究がすごいスピードで進んでいる
![Preferred Networks, Inc.
中郷孝祐
2021年3月21日
日本化学会第101春季大会(2021)
[S04-3pm-01] T1C. インフォマティクスで変わる化学合成
Deep learningの発展と
化学反応への応用](https://image.slidesharecdn.com/20210321synthesiscsjv7-210319030548/75/Deep-learning-101-2021-1-2048.jpg)


C(=O)O
- C[C@H](N)C(=O)O
- C[C@@H](C(=O)O)N
- OC(=O)[C@H](C)N](https://image.slidesharecdn.com/20210321synthesiscsjv7-210319030548/75/Deep-learning-101-2021-39-2048.jpg)













![SSII2022 [OS3-02] Federated Learningの基礎と応用](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2022-os3-02-220607020834-2b5f93ff-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]Learning Transferable Visual Models From Natural Language Supervision](https://cdn.slidesharecdn.com/ss_thumbnails/dlkobayashi0115-210115012308-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]ドメイン転移と不変表現に関するサーベイ](https://cdn.slidesharecdn.com/ss_thumbnails/20190614iwasawa-190614005939-thumbnail.jpg?width=640&height=640&fit=bounds)







![[DL輪読会]Focal Loss for Dense Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/focalloss-180208092846-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]Graph Convolutional Policy Network for Goal-Directed Molecular Graph G...](https://cdn.slidesharecdn.com/ss_thumbnails/graphconvolutionalpolicynetworkforgoal-directedmoleculargraphgeneration-181102004011-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Learning to Simulate Complex Physics with Graph Networks](https://cdn.slidesharecdn.com/ss_thumbnails/learningtosimulatecomplexphysicswithgraphnetworks-200508054213-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Relational inductive biases, deep learning, and graph networks](https://cdn.slidesharecdn.com/ss_thumbnails/180629dlseminarrelationalinductivebias-180706003755-thumbnail.jpg?width=640&height=640&fit=bounds)




























