Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Yahoo!デベロッパーネットワーク
PDF, PPTX
27,980 views
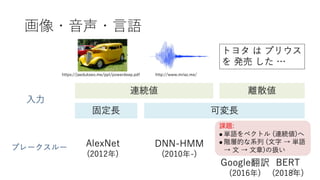
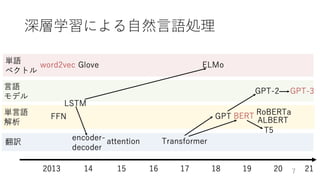
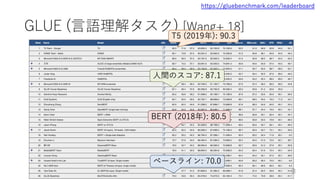
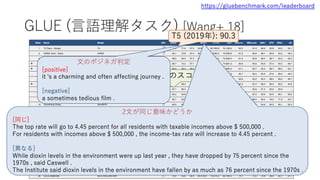
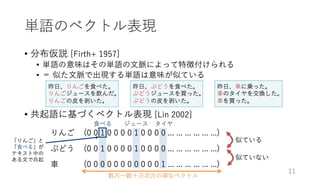
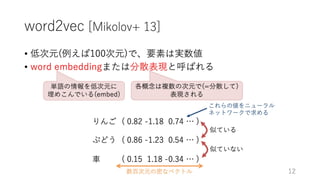
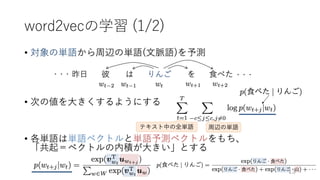
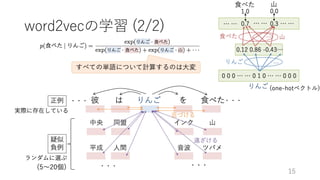
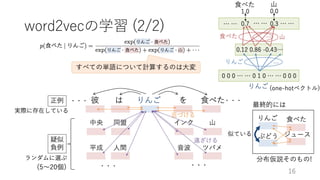
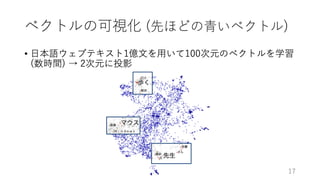
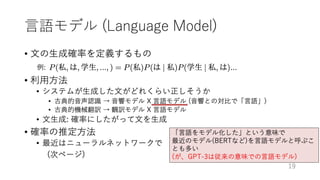
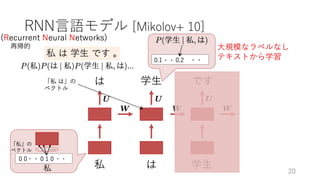
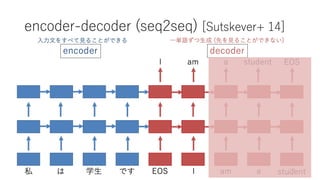
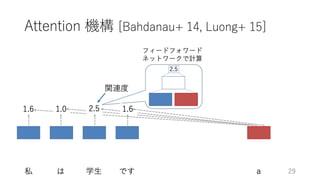
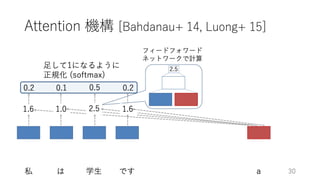
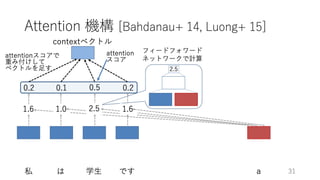
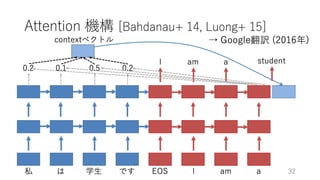
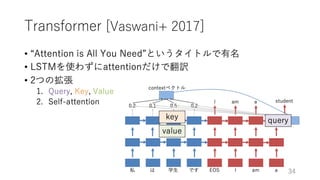
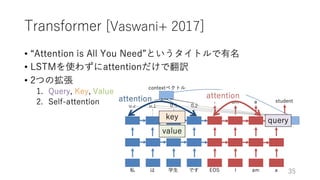
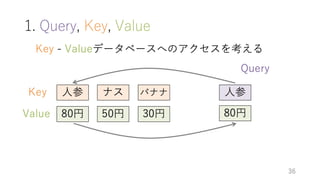
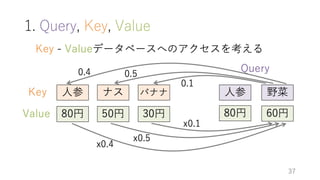
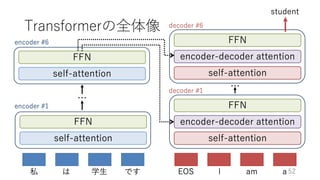
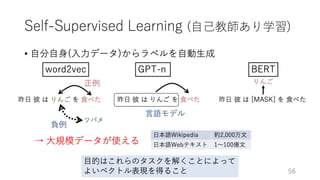
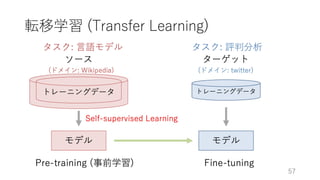
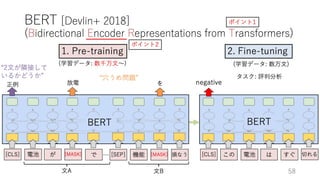
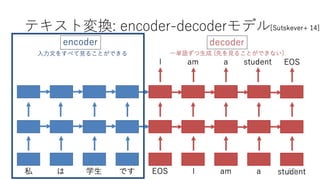
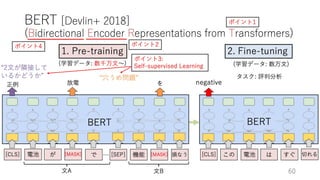
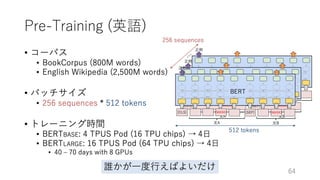
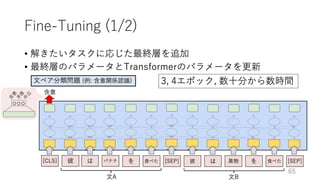
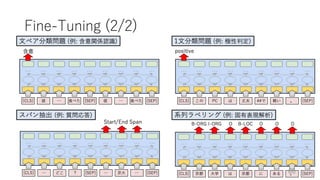
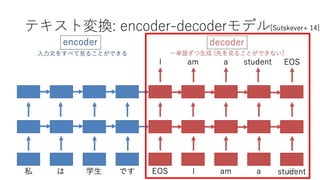
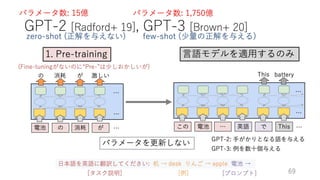
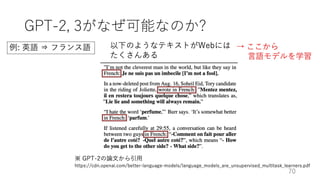
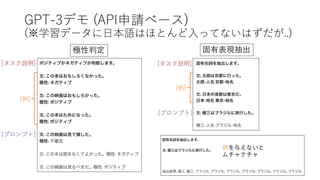
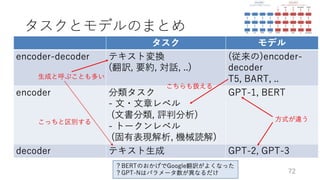
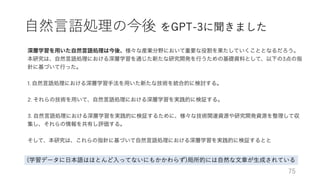
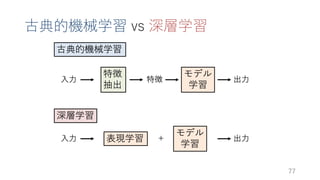
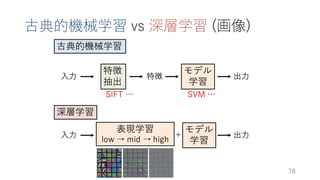
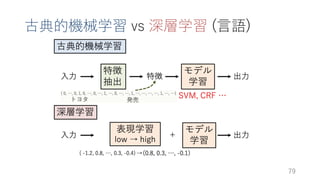
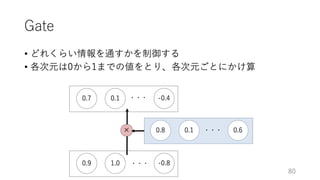
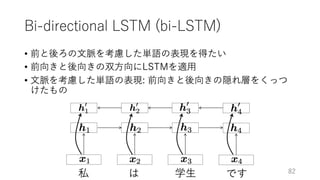
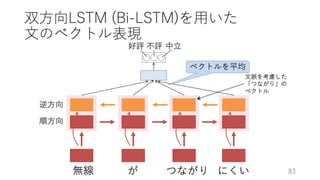
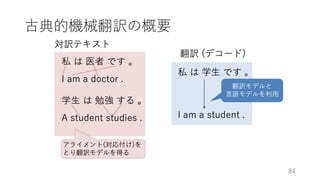
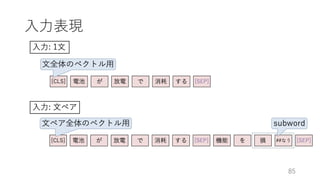
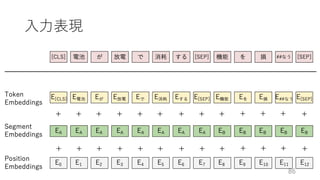
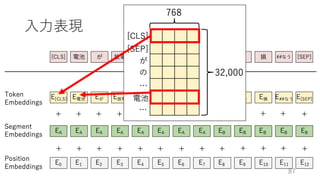
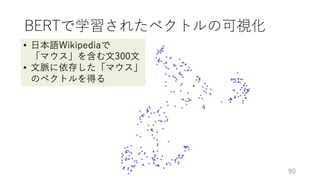
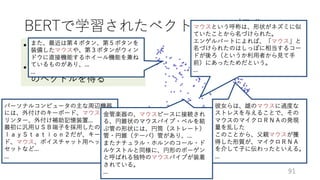
深層学習による自然言語処理入門: word2vecからBERT, GPT-3まで
第1回Webインテリジェンスとインタラクションセミナー(いまさら訊けないシリーズ「言語処理技術」)での発表資料です。 https://www.sigwi2.org/next-sig
Technology
◦
Read more
26
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 91
2
/ 91
3
/ 91
4
/ 91
5
/ 91
6
/ 91
7
/ 91
8
/ 91
9
/ 91
10
/ 91
11
/ 91
Most read
12
/ 91
Most read
13
/ 91
14
/ 91
15
/ 91
Most read
16
/ 91
17
/ 91
18
/ 91
19
/ 91
20
/ 91
21
/ 91
22
/ 91
23
/ 91
24
/ 91
25
/ 91
26
/ 91
27
/ 91
28
/ 91
29
/ 91
30
/ 91
31
/ 91
32
/ 91
33
/ 91
34
/ 91
35
/ 91
36
/ 91
37
/ 91
38
/ 91
39
/ 91
40
/ 91
41
/ 91
42
/ 91
43
/ 91
44
/ 91
45
/ 91
46
/ 91
47
/ 91
48
/ 91
49
/ 91
50
/ 91
51
/ 91
52
/ 91
53
/ 91
54
/ 91
55
/ 91
56
/ 91
57
/ 91
58
/ 91
59
/ 91
60
/ 91
61
/ 91
62
/ 91
63
/ 91
64
/ 91
65
/ 91
66
/ 91
67
/ 91
68
/ 91
69
/ 91
70
/ 91
71
/ 91
72
/ 91
73
/ 91
74
/ 91
75
/ 91
76
/ 91
77
/ 91
78
/ 91
79
/ 91
80
/ 91
81
/ 91
82
/ 91
83
/ 91
84
/ 91
85
/ 91
86
/ 91
87
/ 91
88
/ 91
89
/ 91
90
/ 91
91
/ 91
More Related Content
PDF
ゼロから始める転移学習
by
Yahoo!デベロッパーネットワーク
PDF
BERT入門
by
Ken'ichi Matsui
PDF
Optunaを使ったHuman-in-the-loop最適化の紹介 - 2023/04/27 W&B 東京ミートアップ #3
by
Preferred Networks
PPTX
【DL輪読会】Hyena Hierarchy: Towards Larger Convolutional Language Models
by
Deep Learning JP
PDF
大規模データに基づく自然言語処理
by
JunSuzuki21
PDF
最近のDeep Learning (NLP) 界隈におけるAttention事情
by
Yuta Kikuchi
PDF
12. Diffusion Model の数学的基礎.pdf
by
幸太朗 岩澤
PPTX
東京大学2020年度深層学習(Deep learning基礎講座) 第9回「深層学習と自然言語処理」
by
Hitomi Yanaka
ゼロから始める転移学習
by
Yahoo!デベロッパーネットワーク
BERT入門
by
Ken'ichi Matsui
Optunaを使ったHuman-in-the-loop最適化の紹介 - 2023/04/27 W&B 東京ミートアップ #3
by
Preferred Networks
【DL輪読会】Hyena Hierarchy: Towards Larger Convolutional Language Models
by
Deep Learning JP
大規模データに基づく自然言語処理
by
JunSuzuki21
最近のDeep Learning (NLP) 界隈におけるAttention事情
by
Yuta Kikuchi
12. Diffusion Model の数学的基礎.pdf
by
幸太朗 岩澤
東京大学2020年度深層学習(Deep learning基礎講座) 第9回「深層学習と自然言語処理」
by
Hitomi Yanaka
What's hot
PDF
SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法
by
SSII
PDF
ChatGPT 人間のフィードバックから強化学習した対話AI
by
Shota Imai
PPTX
深層学習の数理
by
Taiji Suzuki
PPTX
【DL輪読会】時系列予測 Transfomers の精度向上手法
by
Deep Learning JP
PDF
ドメイン適応の原理と応用
by
Yoshitaka Ushiku
PPTX
【DL輪読会】Efficiently Modeling Long Sequences with Structured State Spaces
by
Deep Learning JP
PDF
SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向
by
SSII
PPTX
【DL輪読会】SimCSE: Simple Contrastive Learning of Sentence Embeddings (EMNLP 2021)
by
Deep Learning JP
PPTX
深層学習の非常に簡単な説明
by
Seiichi Uchida
PDF
機械学習モデルの判断根拠の説明
by
Satoshi Hara
PPTX
[DL輪読会]BERT: Pre-training of Deep Bidirectional Transformers for Language Und...
by
Deep Learning JP
PPTX
強化学習アルゴリズムPPOの解説と実験
by
克海 納谷
PDF
Layer Normalization@NIPS+読み会・関西
by
Keigo Nishida
PDF
グラフィカルモデル入門
by
Kawamoto_Kazuhiko
PPTX
How Much Position Information Do Convolutional Neural Networks Encode?
by
Kazuyuki Miyazawa
PDF
強化学習その3
by
nishio
PDF
機械学習で泣かないためのコード設計 2018
by
Takahiro Kubo
PDF
深層生成モデルと世界モデル(2020/11/20版)
by
Masahiro Suzuki
PPTX
モデルアーキテクチャ観点からの高速化2019
by
Yusuke Uchida
PPTX
[DL輪読会]Focal Loss for Dense Object Detection
by
Deep Learning JP
SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法
by
SSII
ChatGPT 人間のフィードバックから強化学習した対話AI
by
Shota Imai
深層学習の数理
by
Taiji Suzuki
【DL輪読会】時系列予測 Transfomers の精度向上手法
by
Deep Learning JP
ドメイン適応の原理と応用
by
Yoshitaka Ushiku
【DL輪読会】Efficiently Modeling Long Sequences with Structured State Spaces
by
Deep Learning JP
SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向
by
SSII
【DL輪読会】SimCSE: Simple Contrastive Learning of Sentence Embeddings (EMNLP 2021)
by
Deep Learning JP
深層学習の非常に簡単な説明
by
Seiichi Uchida
機械学習モデルの判断根拠の説明
by
Satoshi Hara
[DL輪読会]BERT: Pre-training of Deep Bidirectional Transformers for Language Und...
by
Deep Learning JP
強化学習アルゴリズムPPOの解説と実験
by
克海 納谷
Layer Normalization@NIPS+読み会・関西
by
Keigo Nishida
グラフィカルモデル入門
by
Kawamoto_Kazuhiko
How Much Position Information Do Convolutional Neural Networks Encode?
by
Kazuyuki Miyazawa
強化学習その3
by
nishio
機械学習で泣かないためのコード設計 2018
by
Takahiro Kubo
深層生成モデルと世界モデル(2020/11/20版)
by
Masahiro Suzuki
モデルアーキテクチャ観点からの高速化2019
by
Yusuke Uchida
[DL輪読会]Focal Loss for Dense Object Detection
by
Deep Learning JP
More from Yahoo!デベロッパーネットワーク
PDF
継続的なモデルモニタリングを実現するKubernetes Operator
by
Yahoo!デベロッパーネットワーク
PDF
ヤフーでは開発迅速性と品質のバランスをどう取ってるか
by
Yahoo!デベロッパーネットワーク
PDF
オンプレML基盤on Kubernetes パネルディスカッション
by
Yahoo!デベロッパーネットワーク
PDF
LakeTahoe
by
Yahoo!デベロッパーネットワーク
PDF
オンプレML基盤on Kubernetes 〜Yahoo! JAPAN AIPF〜
by
Yahoo!デベロッパーネットワーク
PDF
Persistent-memory-native Database High-availability Feature
by
Yahoo!デベロッパーネットワーク
PDF
データの価値を最大化させるためのデザイン~データビジュアライゼーションの方法~ #devsumi 17-E-2
by
Yahoo!デベロッパーネットワーク
PDF
eコマースと実店舗の相互利益を目指したデザイン #yjtc
by
Yahoo!デベロッパーネットワーク
PDF
ヤフーを支えるセキュリティ ~サイバー攻撃を防ぐエンジニアの仕事とは~ #yjtc
by
Yahoo!デベロッパーネットワーク
PDF
Yahoo! JAPANのIaaSを支えるKubernetesクラスタ、アップデート自動化への挑戦 #yjtc
by
Yahoo!デベロッパーネットワーク
PDF
ビッグデータから人々のムードを捉える #yjtc
by
Yahoo!デベロッパーネットワーク
PDF
サイエンス領域におけるMLOpsの取り組み #yjtc
by
Yahoo!デベロッパーネットワーク
PDF
ヤフーのAIプラットフォーム紹介 ~AIテックカンパニーを支えるデータ基盤~ #yjtc
by
Yahoo!デベロッパーネットワーク
PDF
Yahoo! JAPAN Tech Conference 2022 Day2 Keynote #yjtc
by
Yahoo!デベロッパーネットワーク
PDF
新技術を使った次世代の商品の見せ方 ~ヤフオク!のマルチビュー機能~ #yjtc
by
Yahoo!デベロッパーネットワーク
PDF
PC版Yahoo!メールリニューアル ~サービスのUI/UX統合と改善プロセス~ #yjtc
by
Yahoo!デベロッパーネットワーク
PDF
モブデザインによる多職種チームのコミュニケーション改善 #yjtc
by
Yahoo!デベロッパーネットワーク
PDF
「新しいおうち探し」のためのAIアシスト検索 #yjtc
by
Yahoo!デベロッパーネットワーク
PDF
ユーザーの地域を考慮した検索入力補助機能の改善の試み #yjtc
by
Yahoo!デベロッパーネットワーク
PDF
The potential of Kubernetes as more than just an infrastructure to deploy
by
Yahoo!デベロッパーネットワーク
継続的なモデルモニタリングを実現するKubernetes Operator
by
Yahoo!デベロッパーネットワーク
ヤフーでは開発迅速性と品質のバランスをどう取ってるか
by
Yahoo!デベロッパーネットワーク
オンプレML基盤on Kubernetes パネルディスカッション
by
Yahoo!デベロッパーネットワーク
LakeTahoe
by
Yahoo!デベロッパーネットワーク
オンプレML基盤on Kubernetes 〜Yahoo! JAPAN AIPF〜
by
Yahoo!デベロッパーネットワーク
Persistent-memory-native Database High-availability Feature
by
Yahoo!デベロッパーネットワーク
データの価値を最大化させるためのデザイン~データビジュアライゼーションの方法~ #devsumi 17-E-2
by
Yahoo!デベロッパーネットワーク
eコマースと実店舗の相互利益を目指したデザイン #yjtc
by
Yahoo!デベロッパーネットワーク
ヤフーを支えるセキュリティ ~サイバー攻撃を防ぐエンジニアの仕事とは~ #yjtc
by
Yahoo!デベロッパーネットワーク
Yahoo! JAPANのIaaSを支えるKubernetesクラスタ、アップデート自動化への挑戦 #yjtc
by
Yahoo!デベロッパーネットワーク
ビッグデータから人々のムードを捉える #yjtc
by
Yahoo!デベロッパーネットワーク
サイエンス領域におけるMLOpsの取り組み #yjtc
by
Yahoo!デベロッパーネットワーク
ヤフーのAIプラットフォーム紹介 ~AIテックカンパニーを支えるデータ基盤~ #yjtc
by
Yahoo!デベロッパーネットワーク
Yahoo! JAPAN Tech Conference 2022 Day2 Keynote #yjtc
by
Yahoo!デベロッパーネットワーク
新技術を使った次世代の商品の見せ方 ~ヤフオク!のマルチビュー機能~ #yjtc
by
Yahoo!デベロッパーネットワーク
PC版Yahoo!メールリニューアル ~サービスのUI/UX統合と改善プロセス~ #yjtc
by
Yahoo!デベロッパーネットワーク
モブデザインによる多職種チームのコミュニケーション改善 #yjtc
by
Yahoo!デベロッパーネットワーク
「新しいおうち探し」のためのAIアシスト検索 #yjtc
by
Yahoo!デベロッパーネットワーク
ユーザーの地域を考慮した検索入力補助機能の改善の試み #yjtc
by
Yahoo!デベロッパーネットワーク
The potential of Kubernetes as more than just an infrastructure to deploy
by
Yahoo!デベロッパーネットワーク
Download


















![SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法](https://cdn.slidesharecdn.com/ss_thumbnails/os2-02final-210610091211-thumbnail.jpg?width=640&height=640&fit=bounds)





![SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向](https://cdn.slidesharecdn.com/ss_thumbnails/os2-03latest-210610045610-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]BERT: Pre-training of Deep Bidirectional Transformers for Language Und...](https://cdn.slidesharecdn.com/ss_thumbnails/dlreadingpaper20181019-181019010218-thumbnail.jpg?width=640&height=640&fit=bounds)








![[DL輪読会]Focal Loss for Dense Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/focalloss-180208092846-thumbnail.jpg?width=640&height=640&fit=bounds)



















