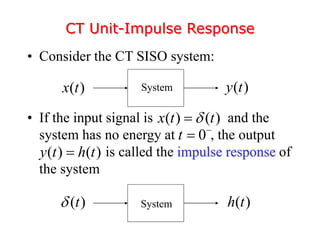
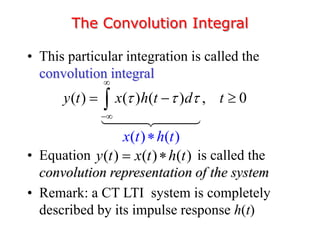
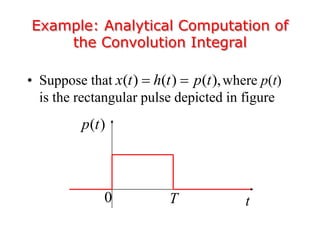
- Convolution is used to represent the output of a continuous-time linear time-invariant (CT LTI) system when the input is an arbitrary signal. The output is defined as the convolution of the input signal with the system's impulse response.
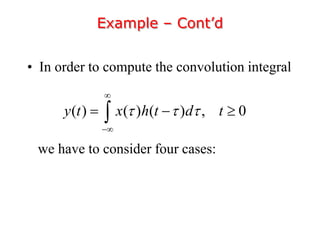
- The impulse response completely characterizes a CT LTI system. The output can be computed by taking the convolution integral of the input signal with the impulse response.
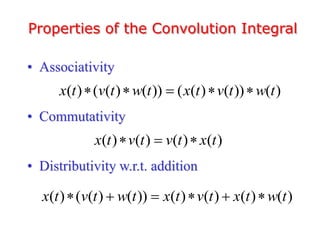
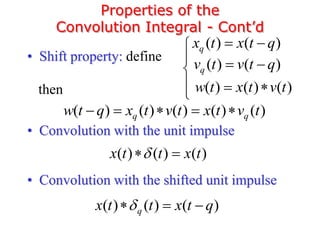
- Properties of the convolution integral include associativity, commutativity, and relationships to differentiation, integration, shifting and scaling of signals.
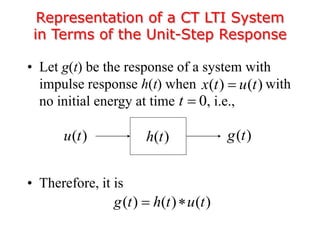
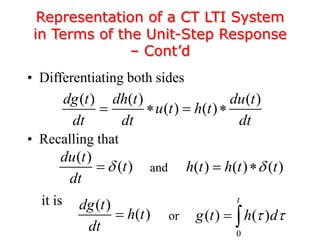
- A CT LTI system can also be represented using the unit step response, which is the convolution of the impulse response with the unit step function.
























![Digital Signal Processing[ECEG-3171]-Ch1_L05](https://cdn.slidesharecdn.com/ss_thumbnails/dspl5ch2-180427094424-thumbnail.jpg?width=640&height=640&fit=bounds)




























































