Download as PDF, PPTX








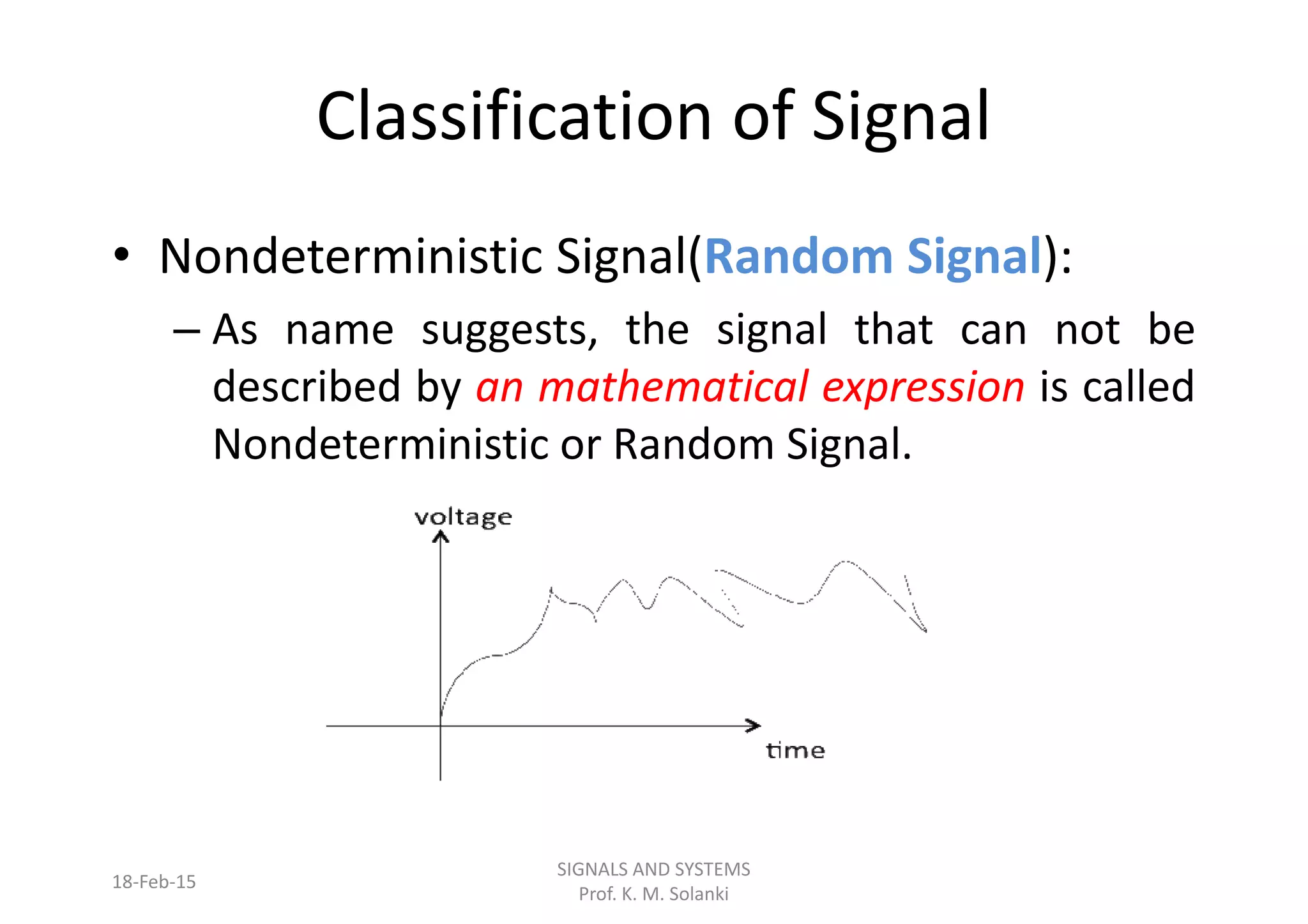



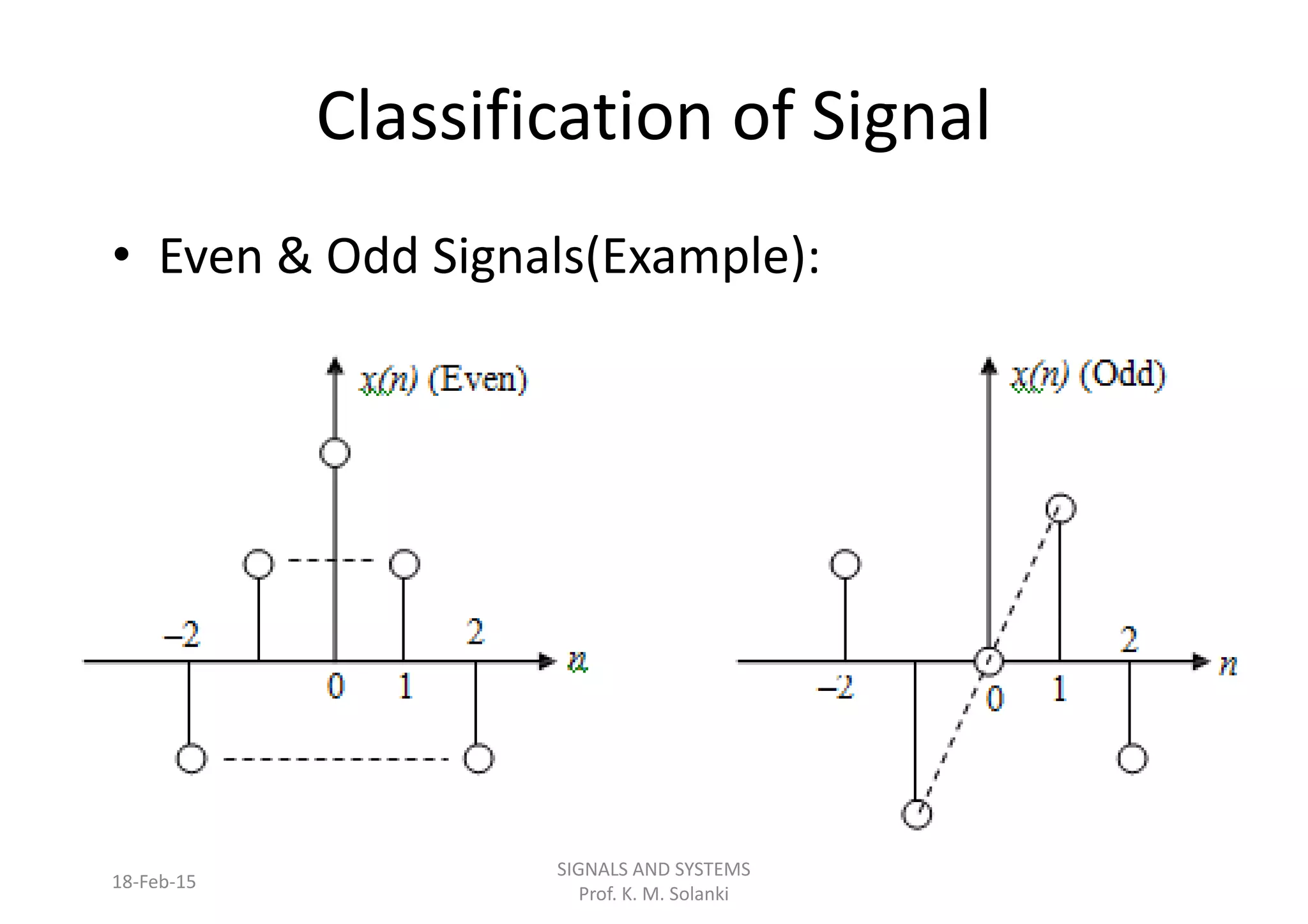









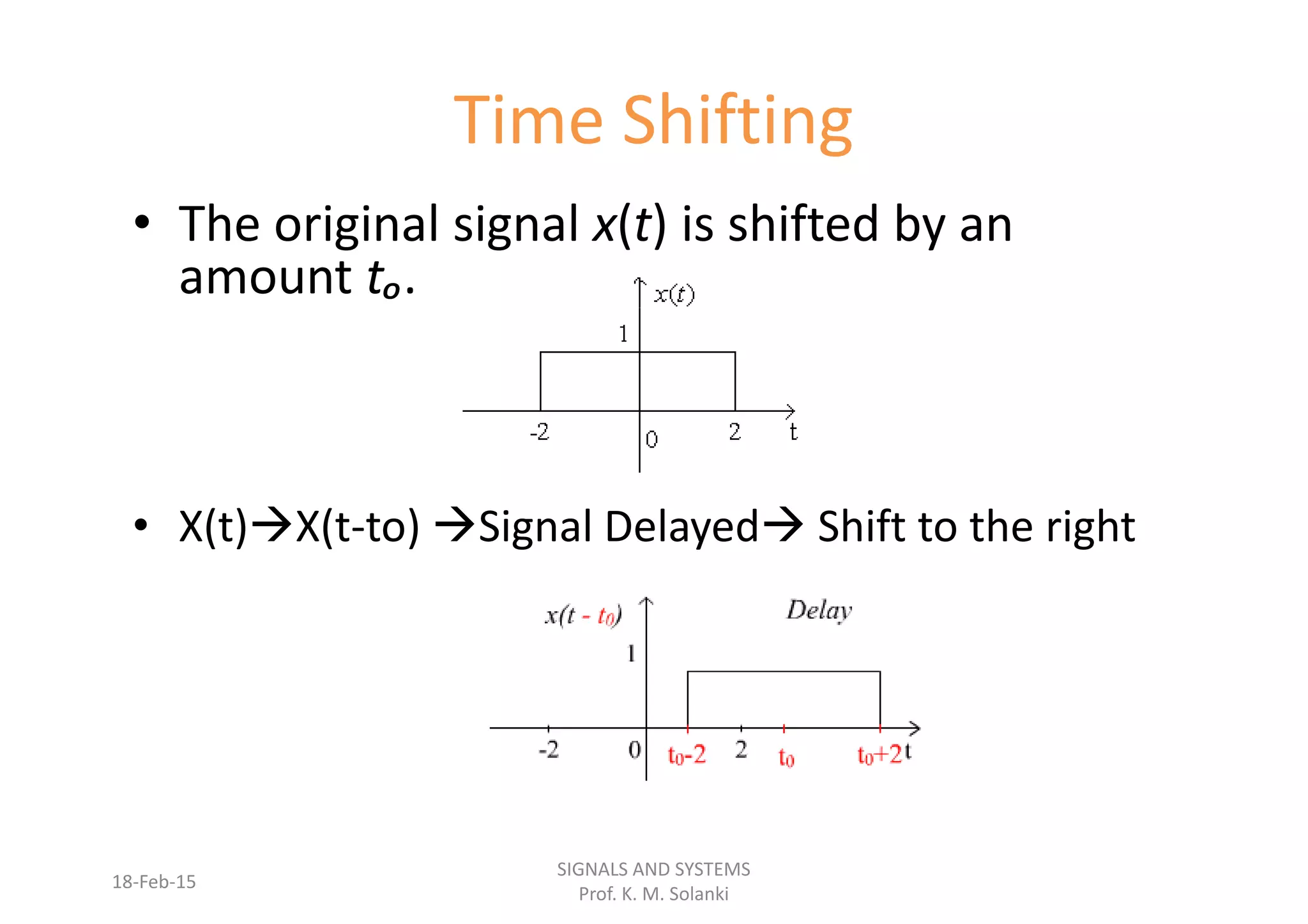


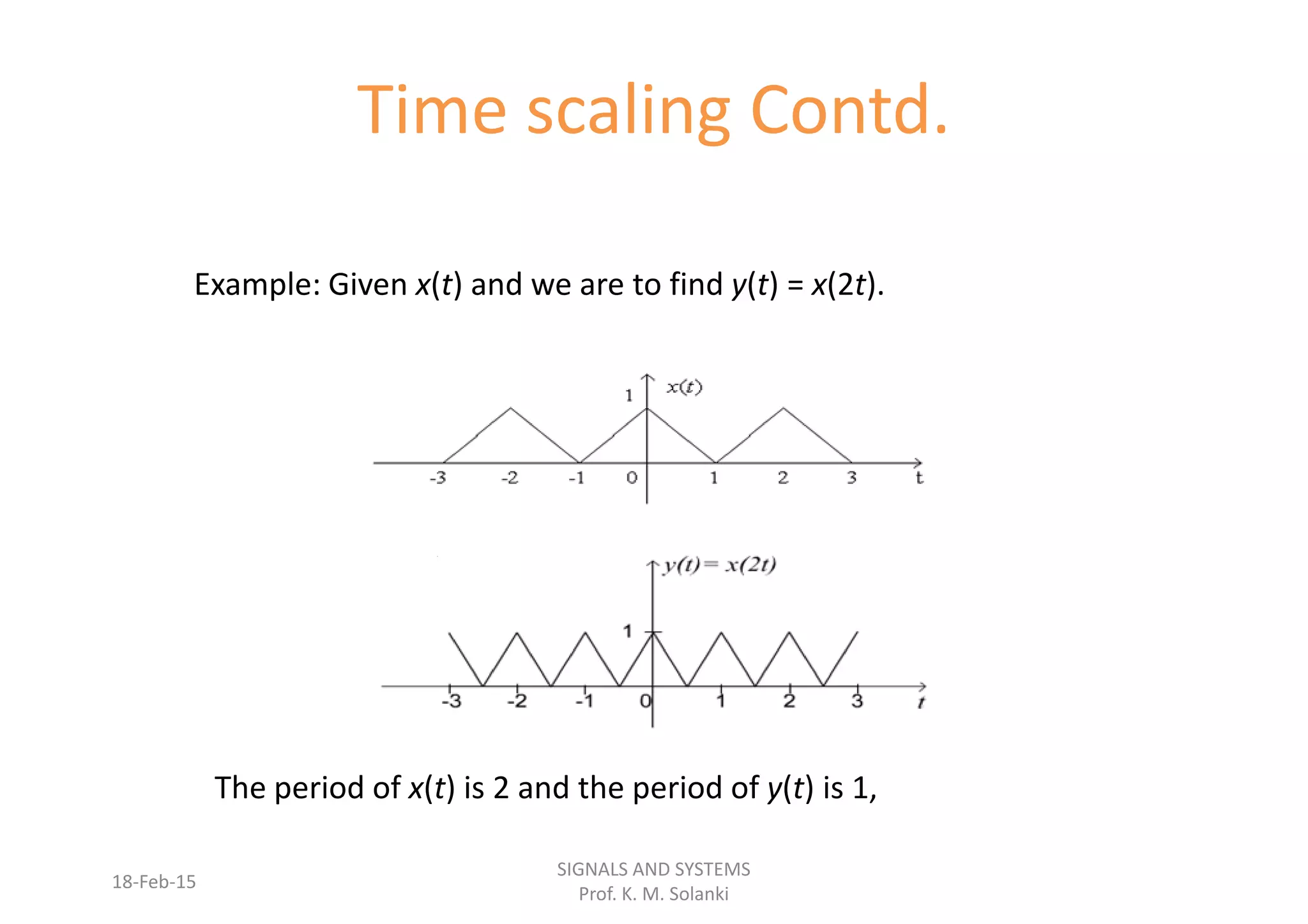







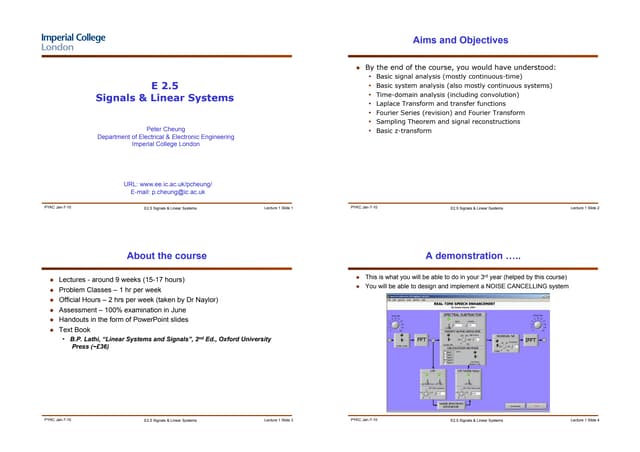
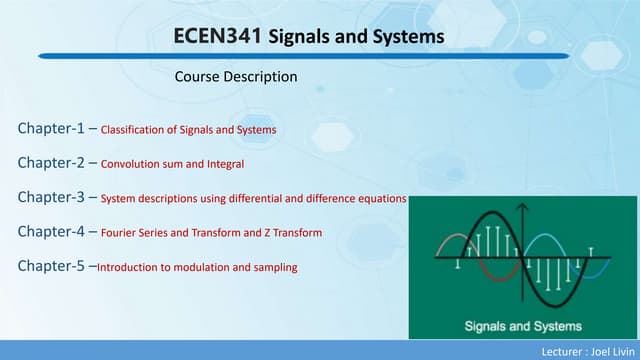
This document outlines the course content for a Signals and Systems course. The following topics will be covered: continuous and discrete time linear time-invariant systems, the discrete Fourier transform, and the Z-transform. Chapter 1 introduces signals and their classification as analog or digital, deterministic or non-deterministic, periodic or aperiodic, even or odd, energy-based or power-based. Signal operations like time shifting, scaling, and inversion are also discussed. Sampling and quantization are explained with reference to the sampling theorem.