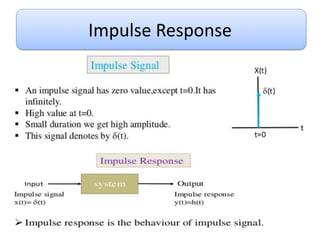
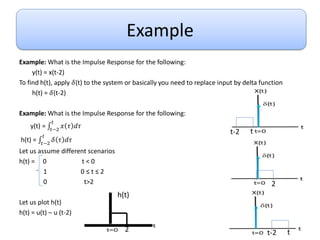
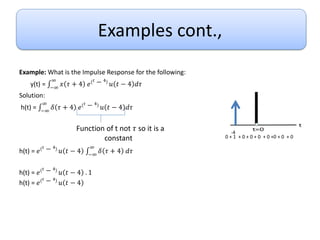
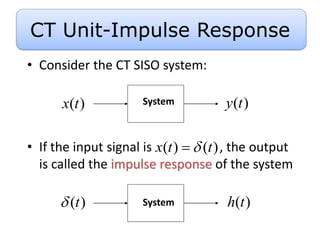
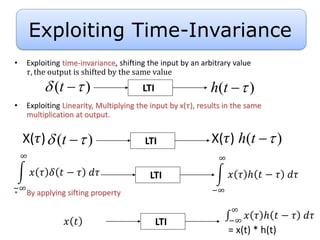
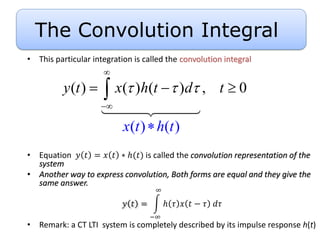
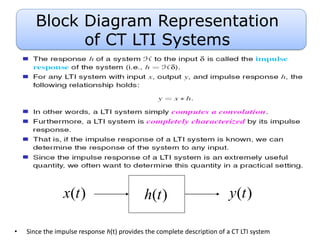
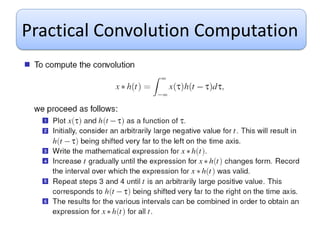
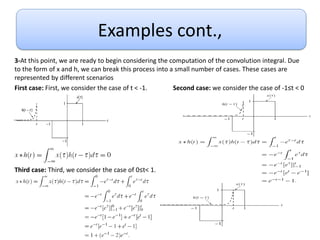
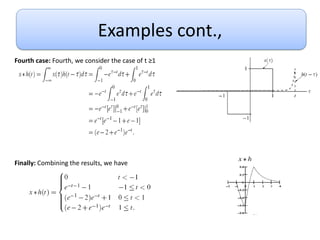
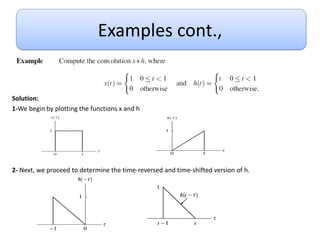
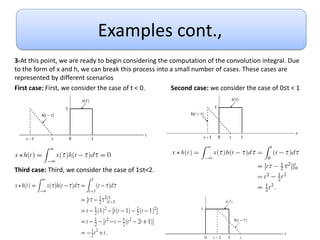
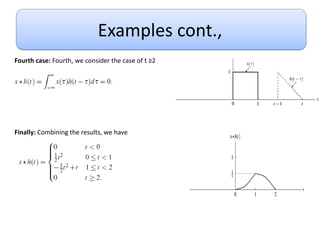
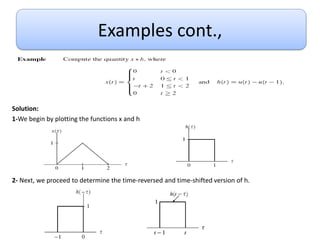
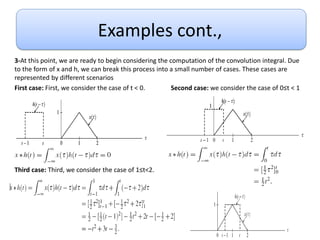
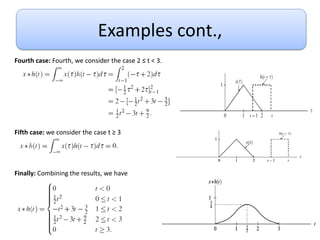
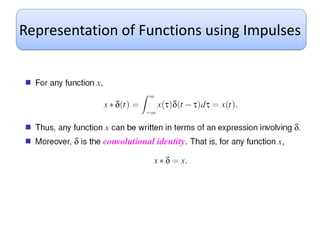
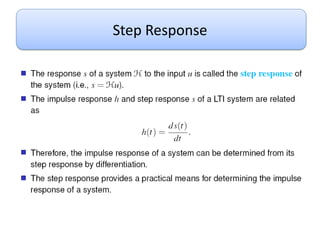
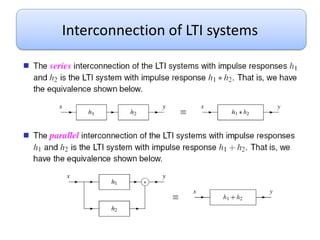
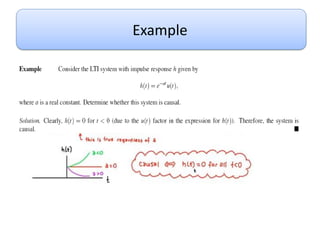
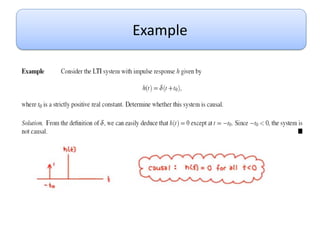
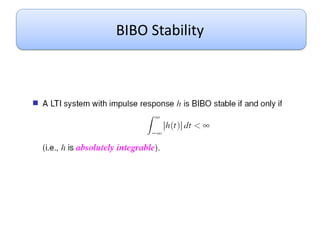
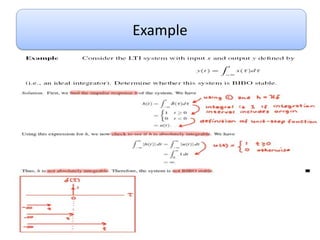
This document discusses convolution and linear time-invariant (LTI) systems. It begins by defining the impulse response of a system and representing convolution using integral forms. Properties of convolution like time-invariance and linearity are described. The step response of LTI systems is introduced. Examples are provided to demonstrate calculating the convolution of inputs and impulse responses by breaking it into cases. Properties of LTI systems discussed include causality, stability, invertibility, and interconnecting multiple LTI systems.