Downloaded 64 times
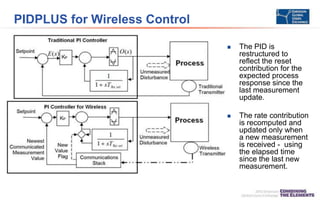
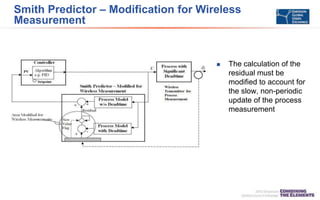
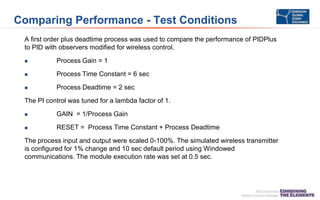
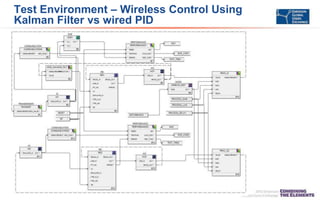
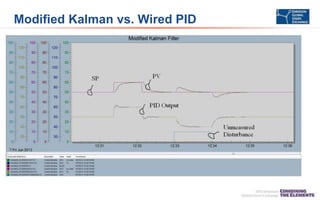
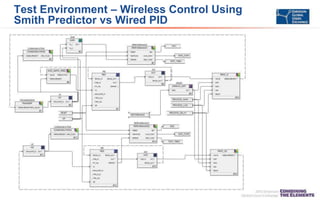
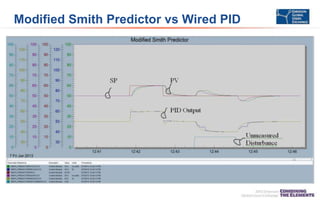
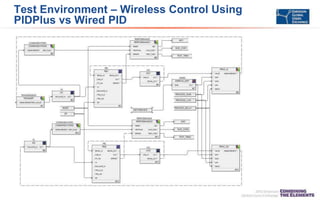
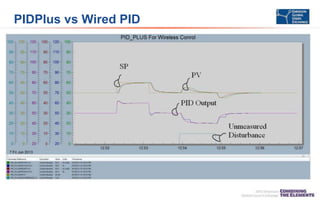
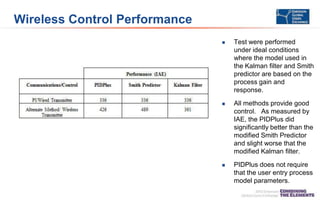


This workshop compares wireless measurement control methods using PIDPlus and modified observers, focusing on the Kalman filter and Smith predictor, to enhance performance in controlling processes with non-periodic updates. Test results show that PIDPlus outperforms modified Smith predictor and performs comparably to the modified Kalman filter in ideal conditions. The PIDPlus is recommended for wireless control due to its robustness against process variability and noise.


















































































