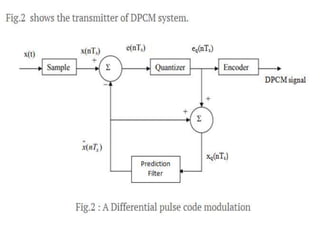
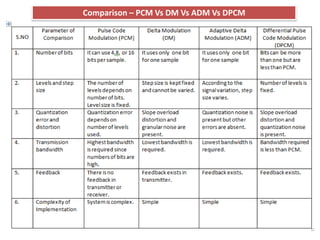
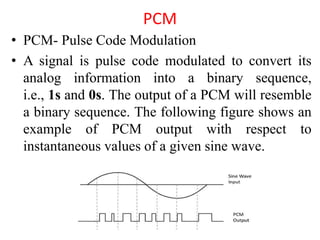
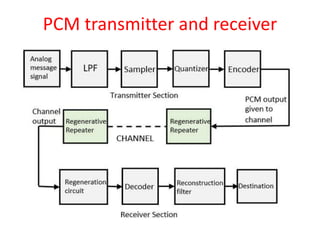
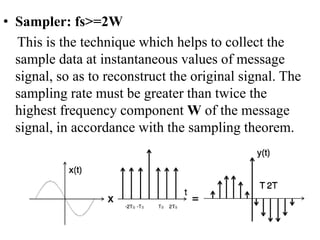
This document provides an overview of several waveform coding and representation techniques, including PCM, DM, ADM, and DPCM. PCM converts an analog signal into a digital binary sequence by sampling, quantizing, and encoding the signal. DM and ADM transmit only one bit per sample and adapt the step size used for quantization. DPCM uses prediction to transmit only the difference between the predicted and actual signal values, requiring fewer bits.






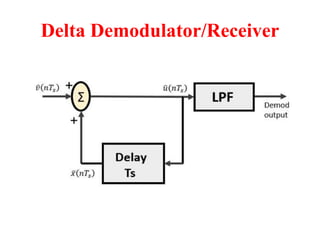
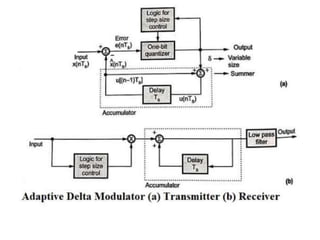
![• x^(nTs) = the previous value of the delay circuit
• eq(nTs) = quantizer output = v(nTs)
• Hence,
• u(nTs)=u([n−1]Ts)+v(nTs)
x^(nTs) = u([n−1]Ts)
CONDITION:
x(nTs) > x^(nTs) = + δ = 1
x(nTs) < x^(nTs) = - δ = 0
Accumulator is used to provide latest reconstructed signal](https://image.slidesharecdn.com/dmadm-240212084314-c6560caf/85/Delta-Modulation-Adaptive-Delta-M-pptx-16-320.jpg)