Download as PDF, PPTX

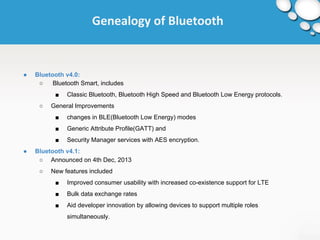
![Specifications
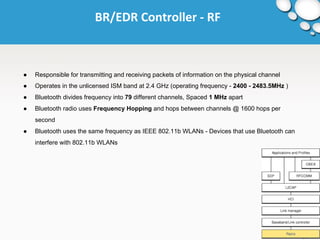
● Bluetooth specification is based on FHSS(Frequency Hopping Spread Spectrum).
● There are 79 channels in Bluetooth each of 1 MHz wide; after each transmit or receive, devices
hop to a new channel. (f = 2402 + k MHz, k = 0, 1, 2 … 78 [f1= 2402, f79=2480])
● Channel Switching is as often as 1600 times per second.
FHSS (Frequency Hopping Spread Spectrum):
- is a method of transmitting radio signals by rapidly switching a carrier among many frequency
channels, using a pseudorandom sequence known to both transmitter and receiver.
- Hopping = No interface
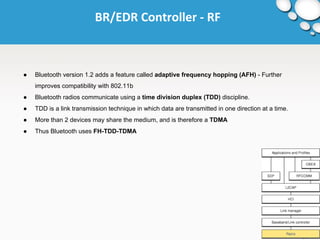
- Adaptive Frequency Hopping
- version-3 supports 2.4GHz and 5GHz](https://image.slidesharecdn.com/bluetooth-140902225434-phpapp01/85/Bluetooth-9-320.jpg)


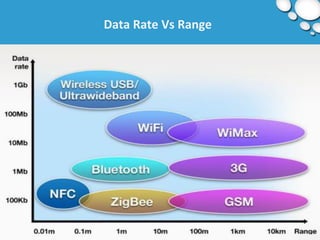
The document discusses Bluetooth as a wireless technology standard for short-range data exchange, detailing its specifications, versions, and fundamental characteristics such as power consumption, data rates, and communication topologies. It explains the development history of Bluetooth, from its initial specifications by Ericsson and other companies to various iterations that enhanced its capabilities and interoperability. The document also covers the Bluetooth protocol stack, communication procedures, and operational modes, highlighting the efficient use of frequency hopping and its compatibility with various applications.