Downloaded 56 times
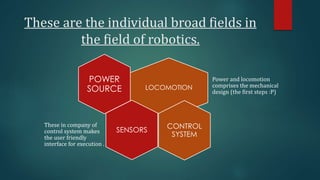









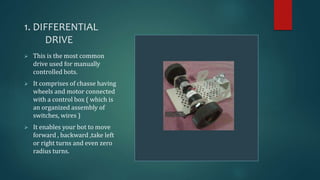









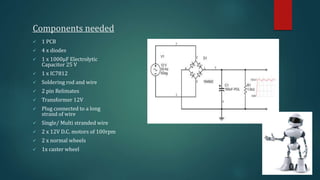
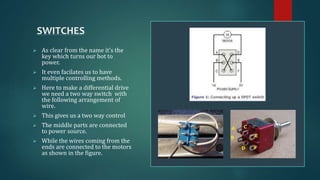



The document serves as a basic guide to understanding robotics, covering essential components and systems for building a manually controlled robot, such as power sources, sensors, and locomotion designs. It explains various robotic drives like differential drive and articulated drive, emphasizing their applications and mechanics. The guide also highlights the significance of creativity in robotics and encourages exploration in a field that is rapidly evolving.